
基于四驱平台车的悬挂转向机构.pdf

一只****ua


1/7

2/7
3/7
4/7
5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于四驱平台车的悬挂转向机构.pdf
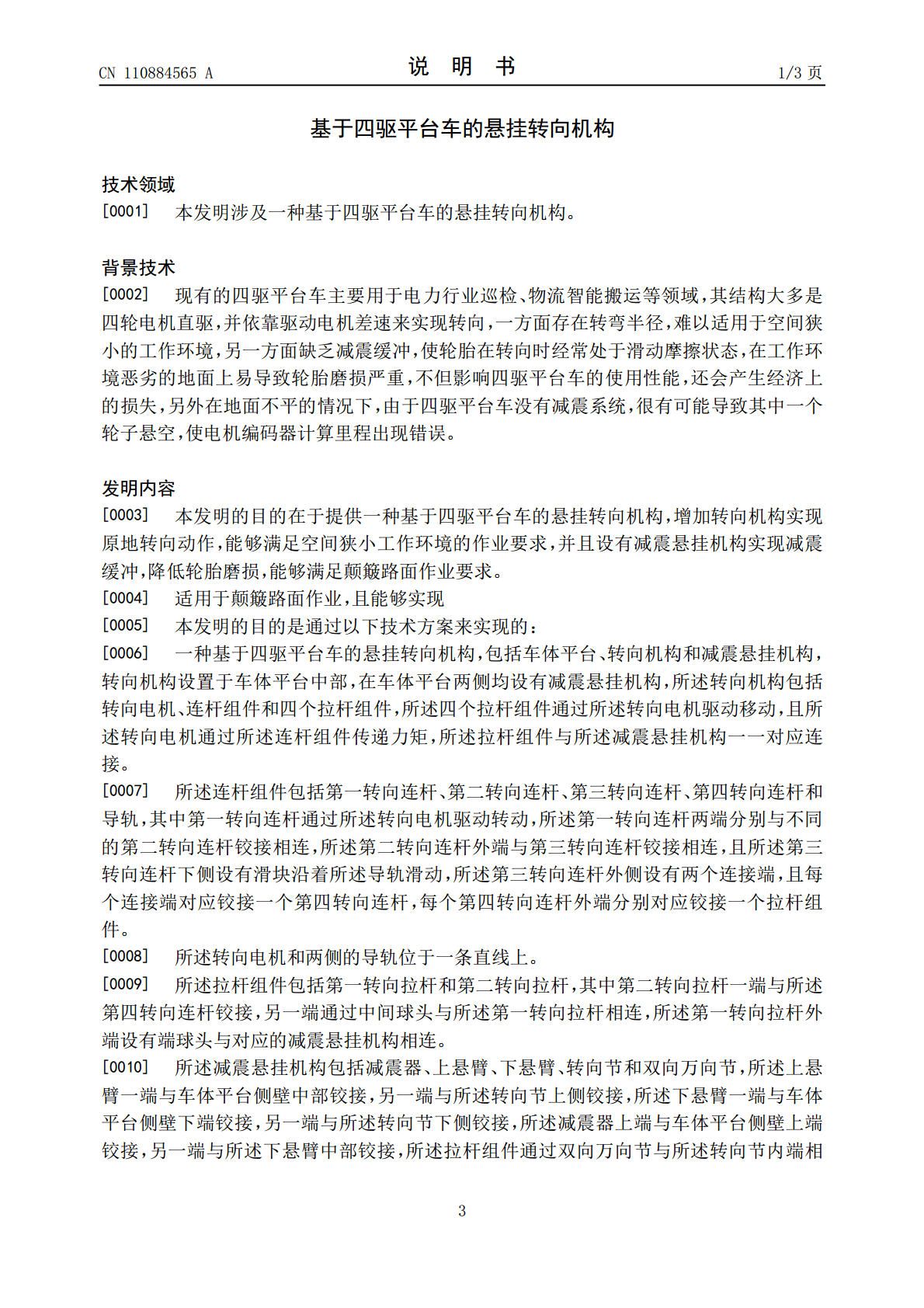
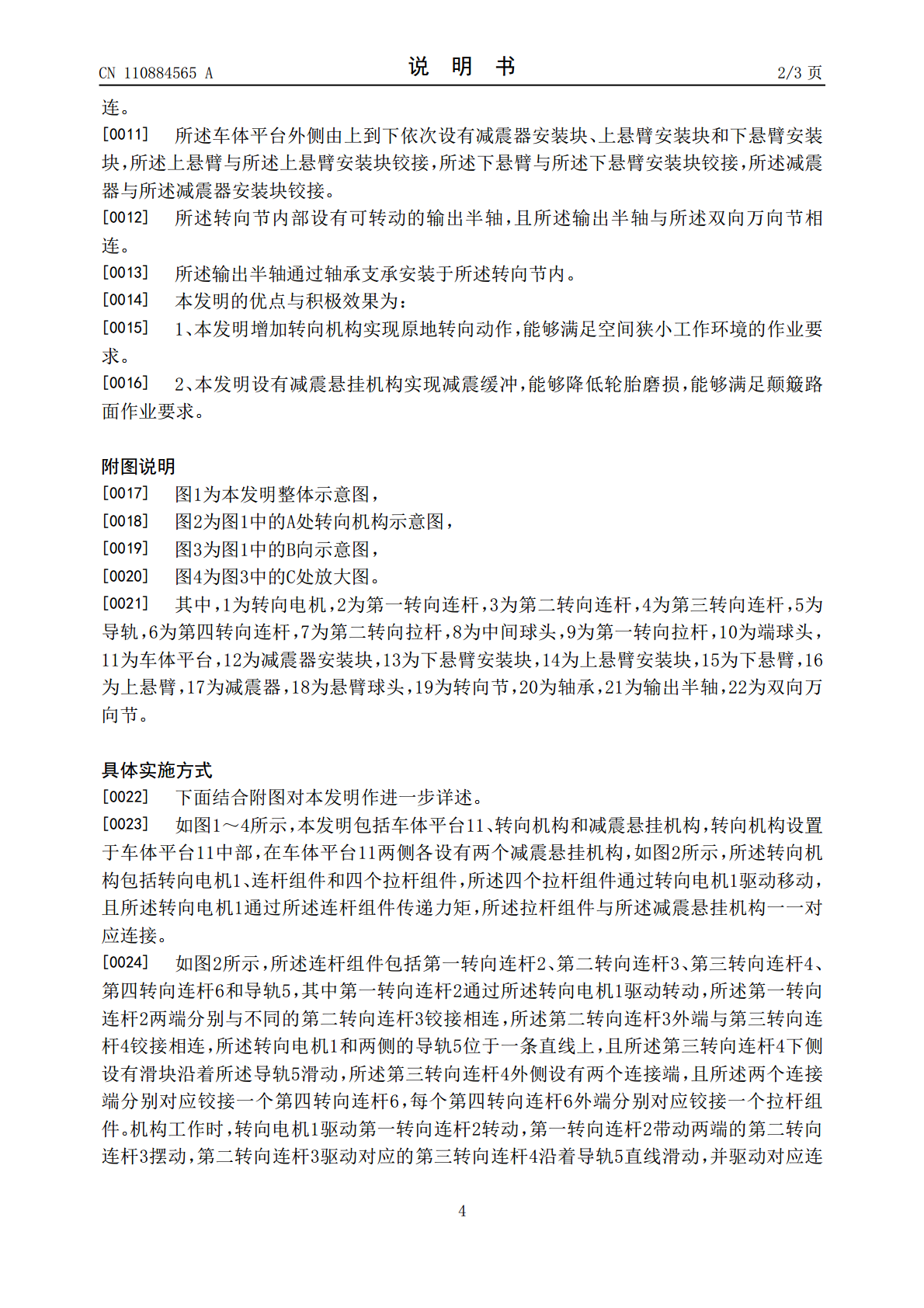
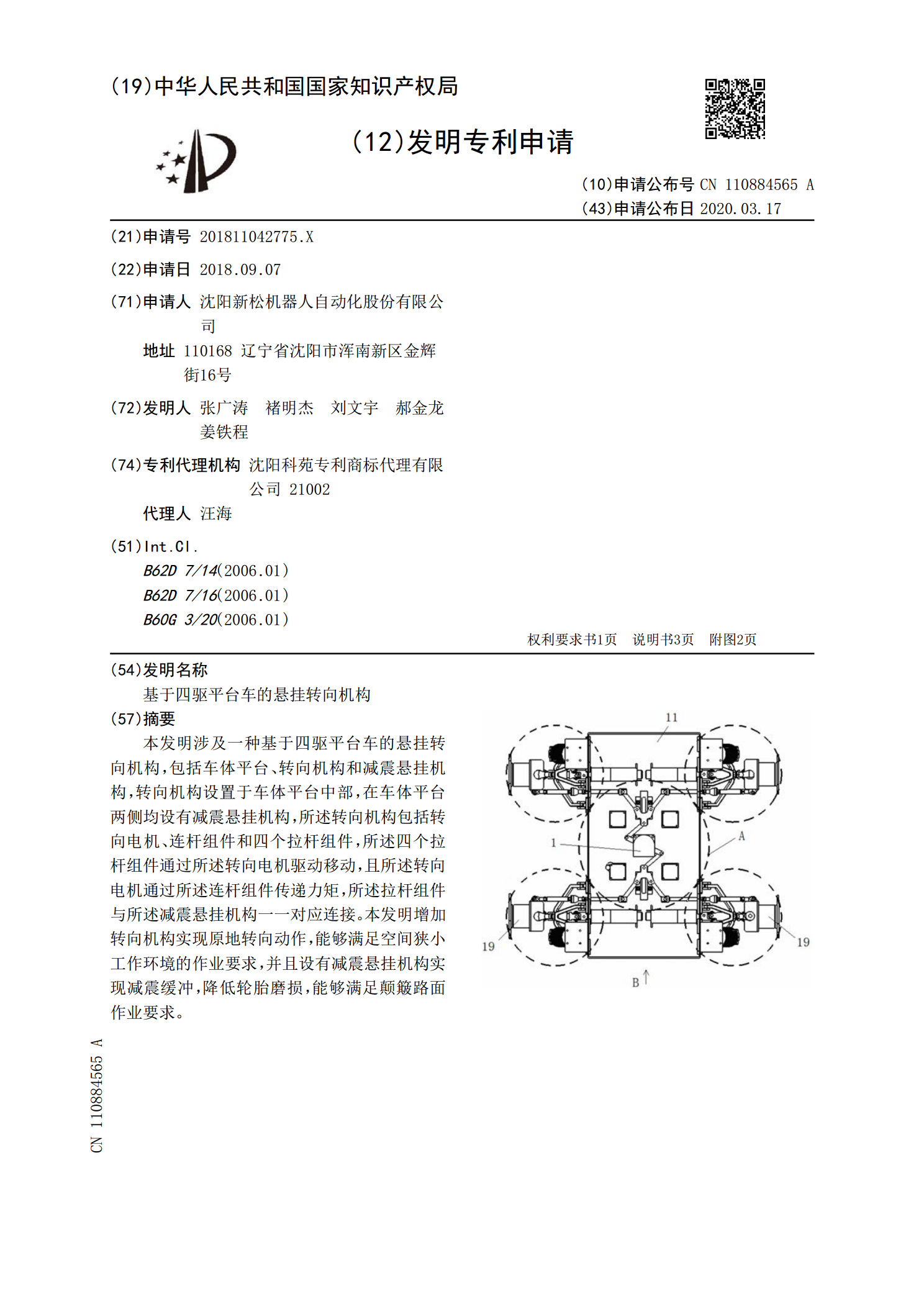
本发明涉及一种基于四驱平台车的悬挂转向机构,包括车体平台、转向机构和减震悬挂机构,转向机构设置于车体平台中部,在车体平台两侧均设有减震悬挂机构,所述转向机构包括转向电机、连杆组件和四个拉杆组件,所述四个拉杆组件通过所述转向电机驱动移动,且所述转向电机通过所述连杆组件传递力矩,所述拉杆组件与所述减震悬挂机构一一对应连接。本发明增加转向机构实现原地转向动作,能够满足空间狭小工作环境的作业要求,并且设有减震悬挂机构实现减震缓冲,降低轮胎磨损,能够满足颠簸路面作业要求。

基于UG的台车转向机构的运动仿真.docx
基于UG的台车转向机构的运动仿真标题:基于UG的台车转向机构的运动仿真摘要:台车转向机构是工业领域中常见的一种机构,它能够实现台车运动方向的改变。本文利用UG软件对台车转向机构进行运动仿真,通过分析模拟结果,验证了设计的合理性和可行性。首先,介绍了台车转向机构的结构和工作原理;然后,详细介绍了UG软件的主要功能和运动仿真方法;接着,通过UG软件对具体的台车转向机构进行建模和运动仿真;最后,根据仿真结果得出结论,并对进一步的研究工作提出展望。关键词:台车转向机构、UG软件、运动仿真、结构设计、工作原理第一章

基于UG的台车转向机构的运动仿真.pptx
添加副标题目录PART01PART02UG软件的特点UG软件在台车转向机构运动仿真中的应用UG软件的操作流程PART03台车转向机构的基本结构台车转向机构的参数设计台车转向机构的运动特性分析PART04建立台车转向机构的模型设置台车转向机构的运动参数进行台车转向机构的运动仿真仿真结果的分析与优化PART05基于UG的台车转向机构优化方法优化后的台车转向机构性能评估优化前后台车转向机构的对比分析PART06基于UG的台车转向机构运动仿真的优势与局限性对未来研究的展望感谢您的观看

移动台车转向机构.pdf
本发明公开了一种移动台车转向机构,包括纵梁和设在纵梁下方的一组可移动的单车,还包括转向油缸和支架,纵梁下方相邻单车之间通过连杆铰接相连,纵梁的端部侧面设有伸出的支架,转向油缸的壳体铰接在支架上,转向油缸的活塞杆端部铰接在单车上。该移动台车转向机构结构设计合理,转向操作机构设置在移动台车纵梁的端部,通过转向油缸驱动操作,操作简便,并且转向稳定可靠。
一种四驱独立转向机构.pdf
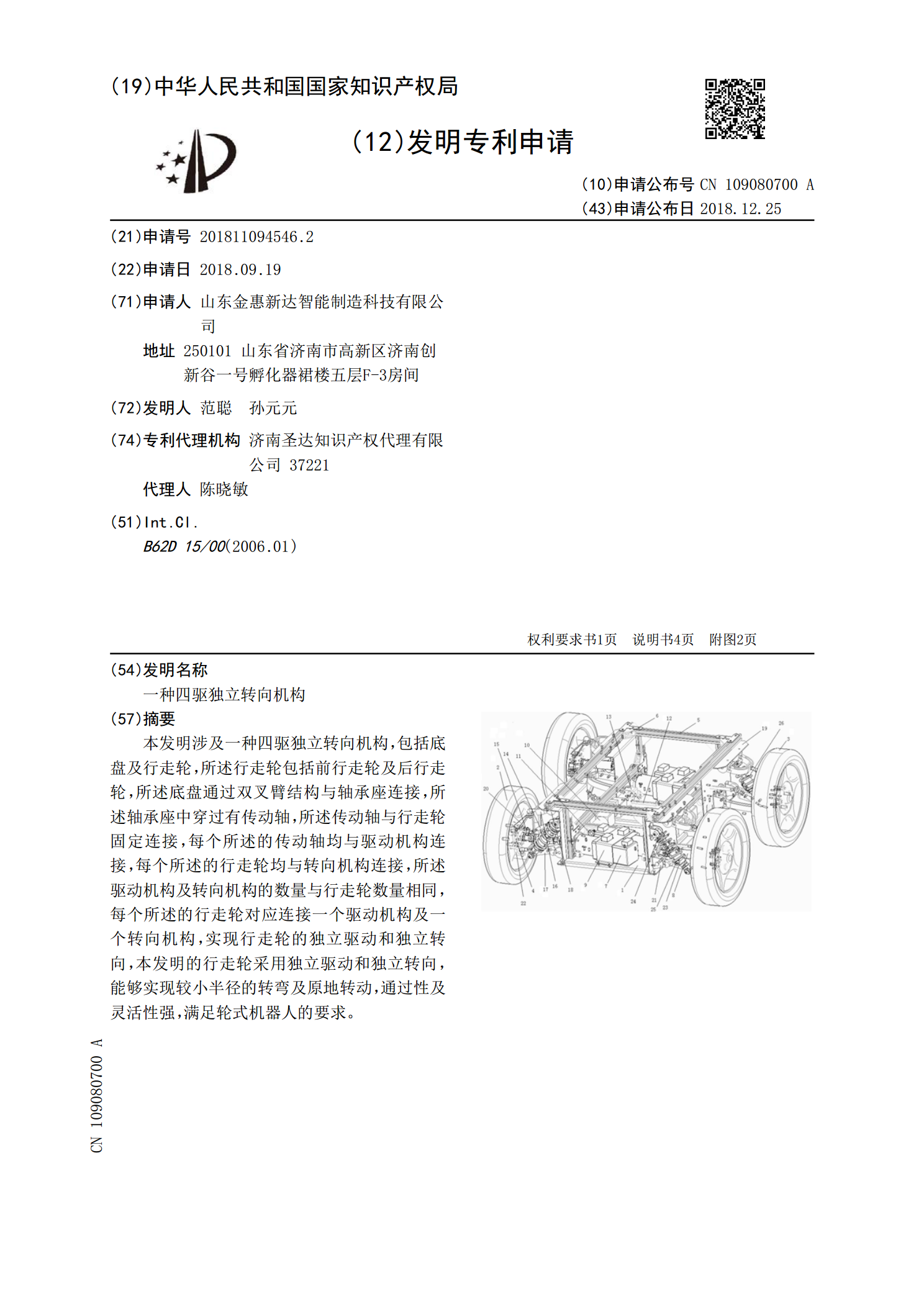
本发明涉及一种四驱独立转向机构,包括底盘及行走轮,所述行走轮包括前行走轮及后行走轮,所述底盘通过双叉臂结构与轴承座连接,所述轴承座中穿过有传动轴,所述传动轴与行走轮固定连接,每个所述的传动轴均与驱动机构连接,每个所述的行走轮均与转向机构连接,所述驱动机构及转向机构的数量与行走轮数量相同,每个所述的行走轮对应连接一个驱动机构及一个转向机构,实现行走轮的独立驱动和独立转向,本发明的行走轮采用独立驱动和独立转向,能够实现较小半径的转弯及原地转动,通过性及灵活性强,满足轮式机器人的要求。