
一种气动肌肉驱动的模块化外骨骼肘腕康复机器人.pdf

是笛****加盟

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种气动肌肉驱动的模块化外骨骼肘腕康复机器人.pdf
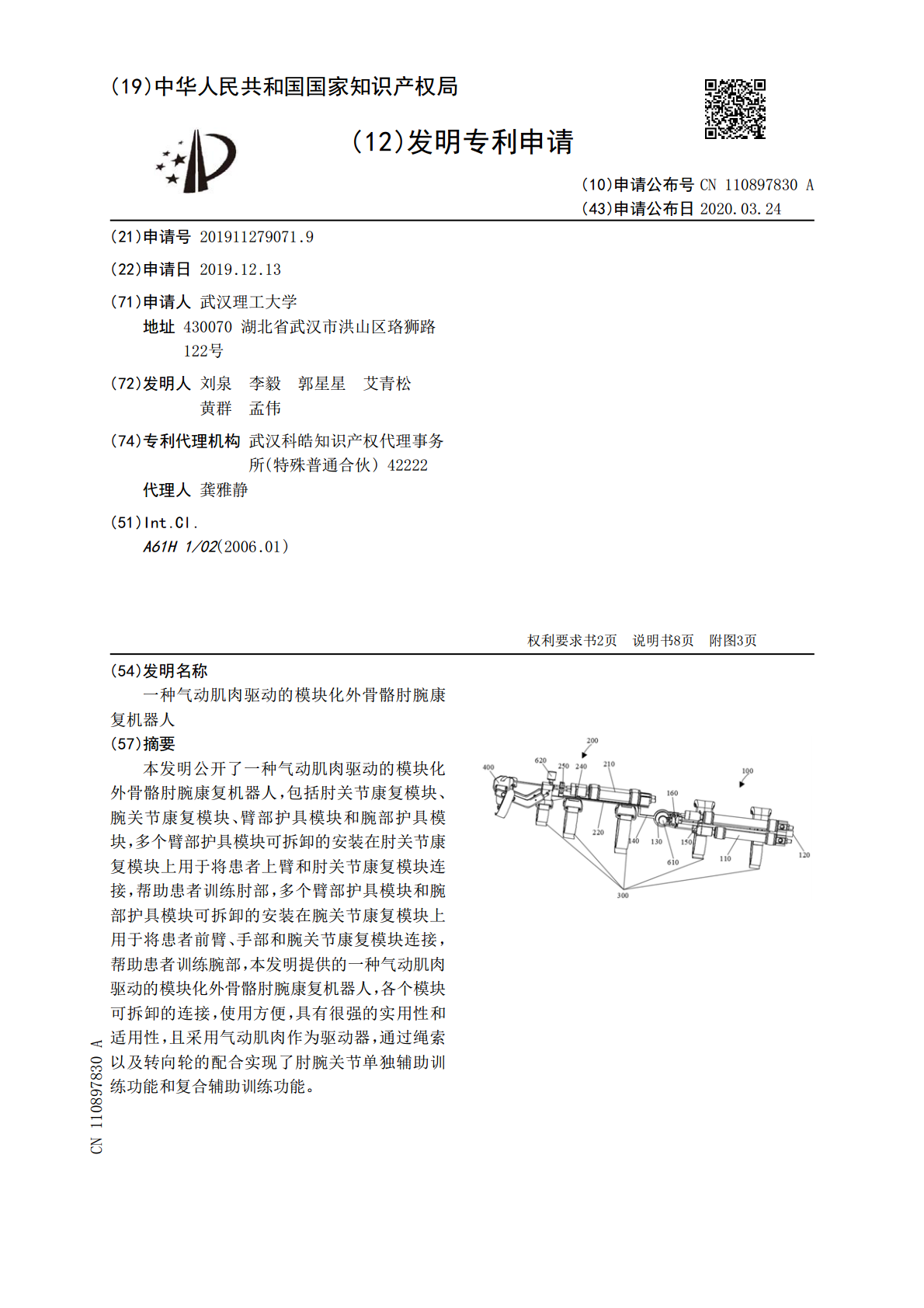
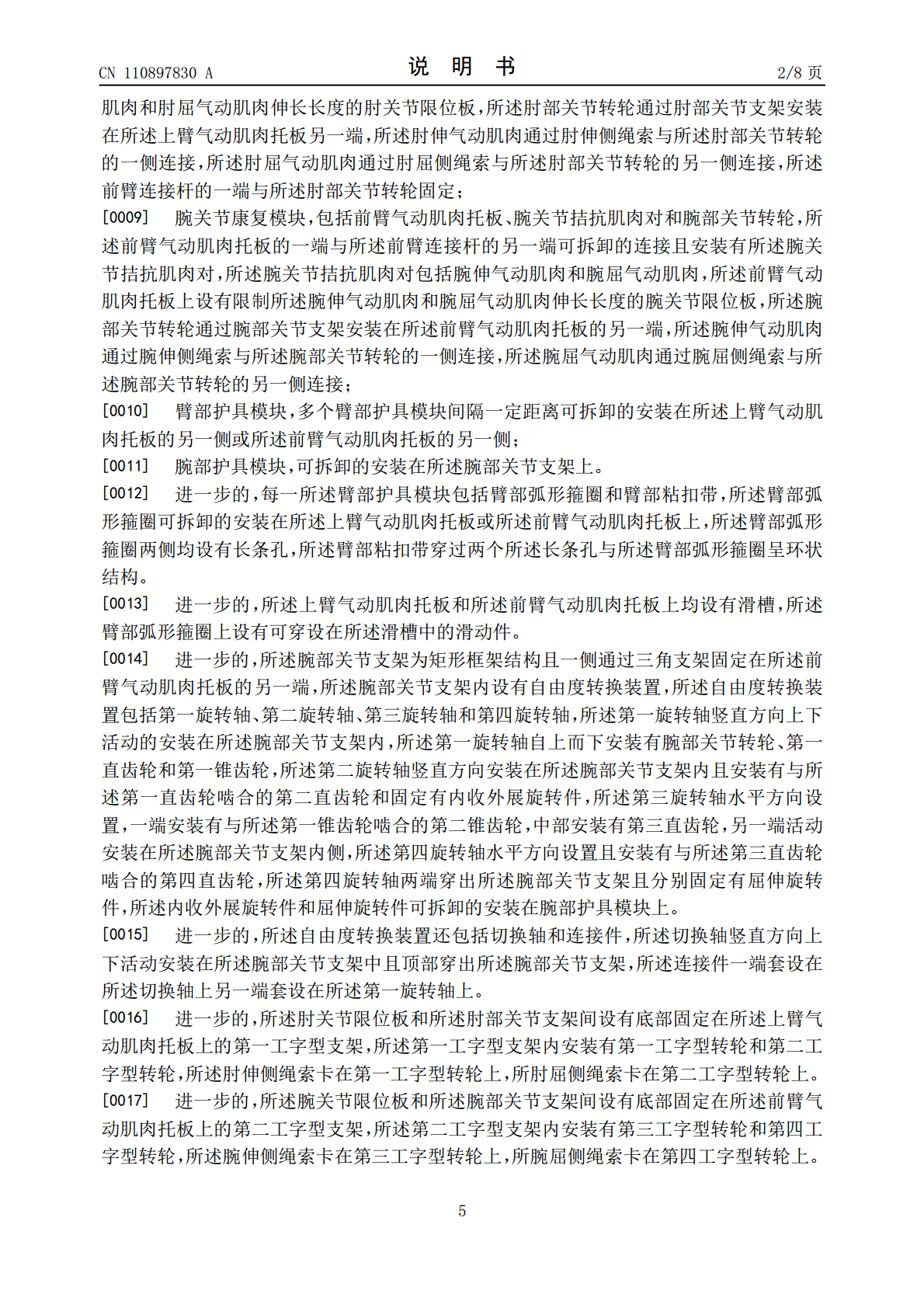
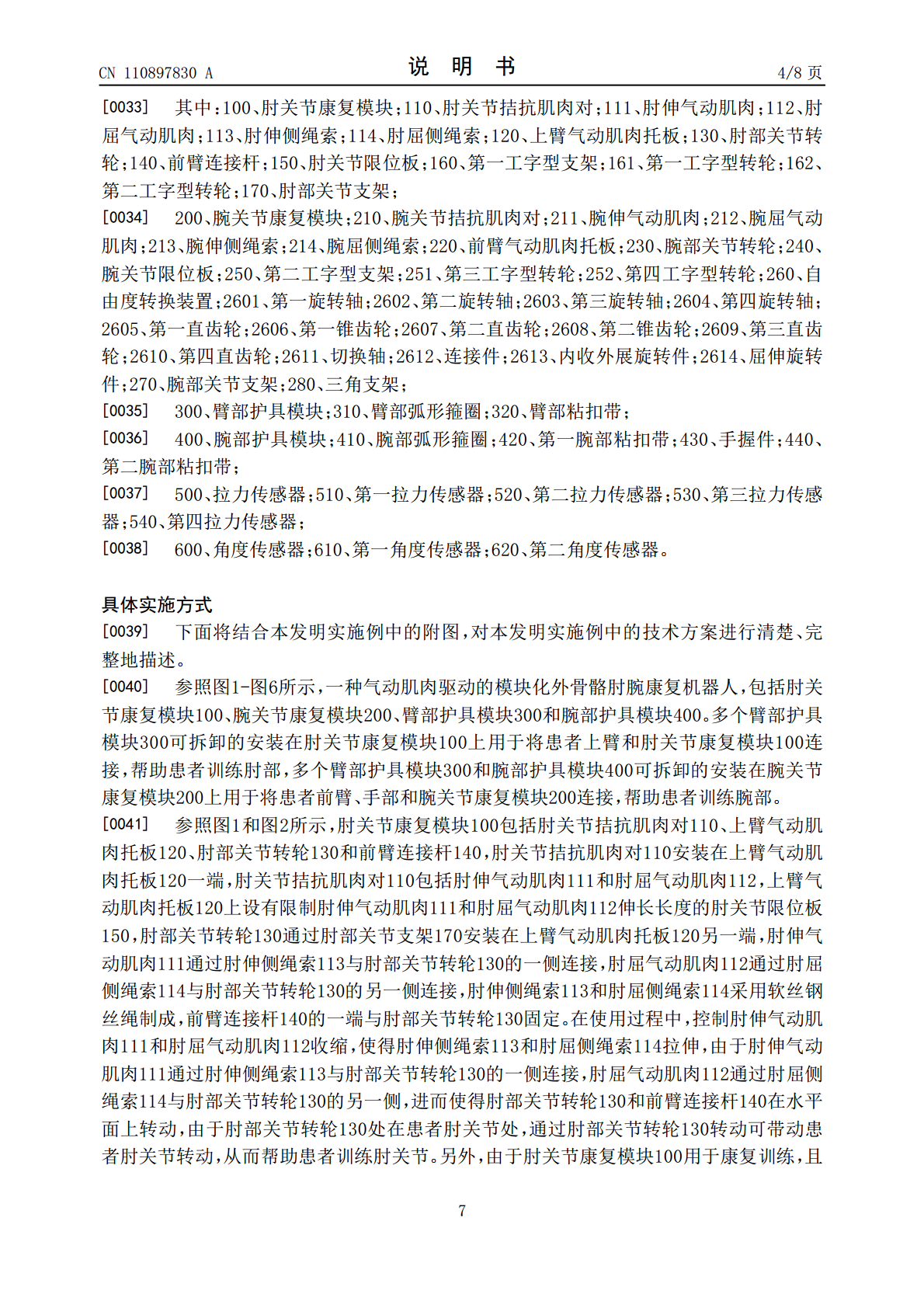
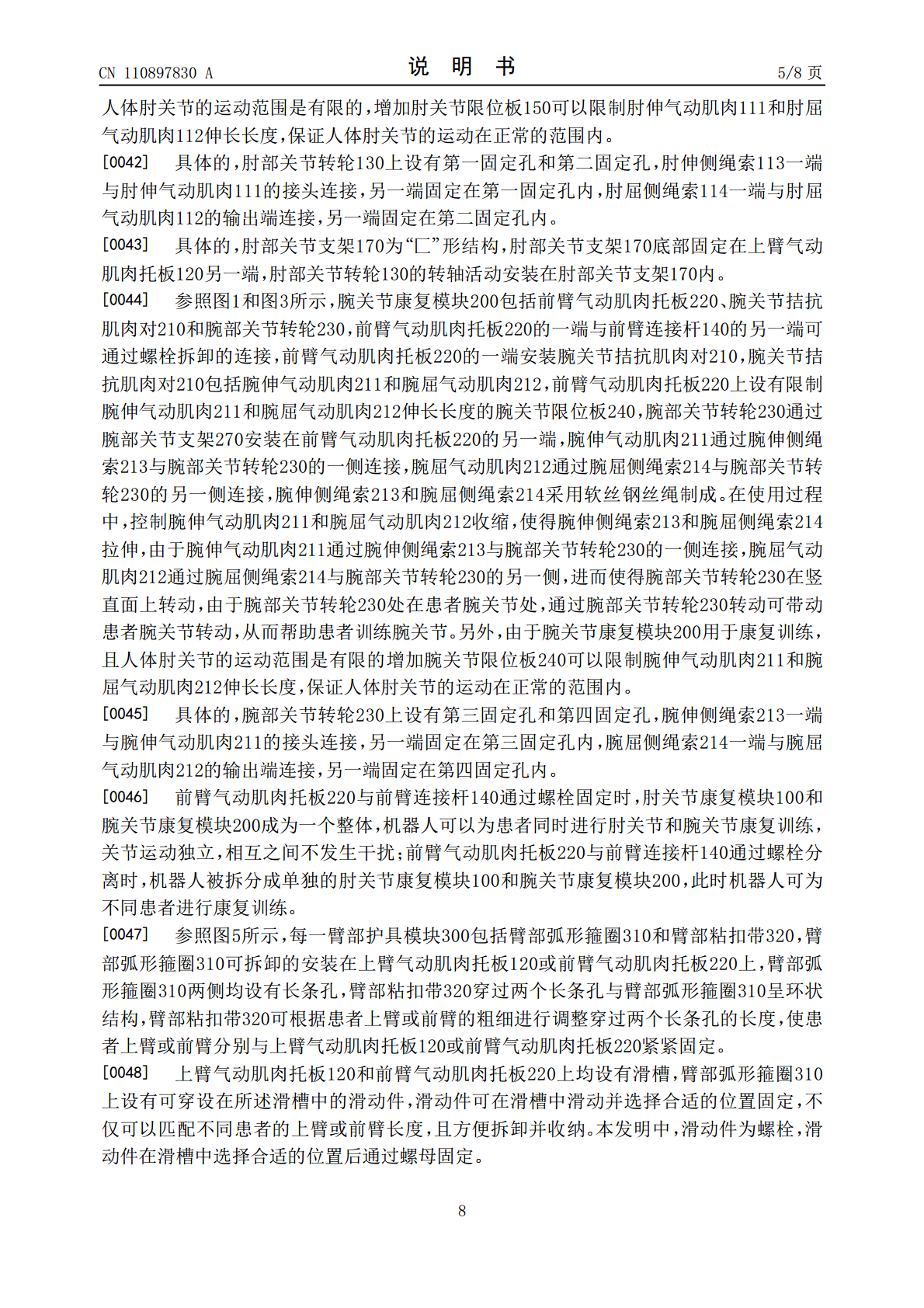
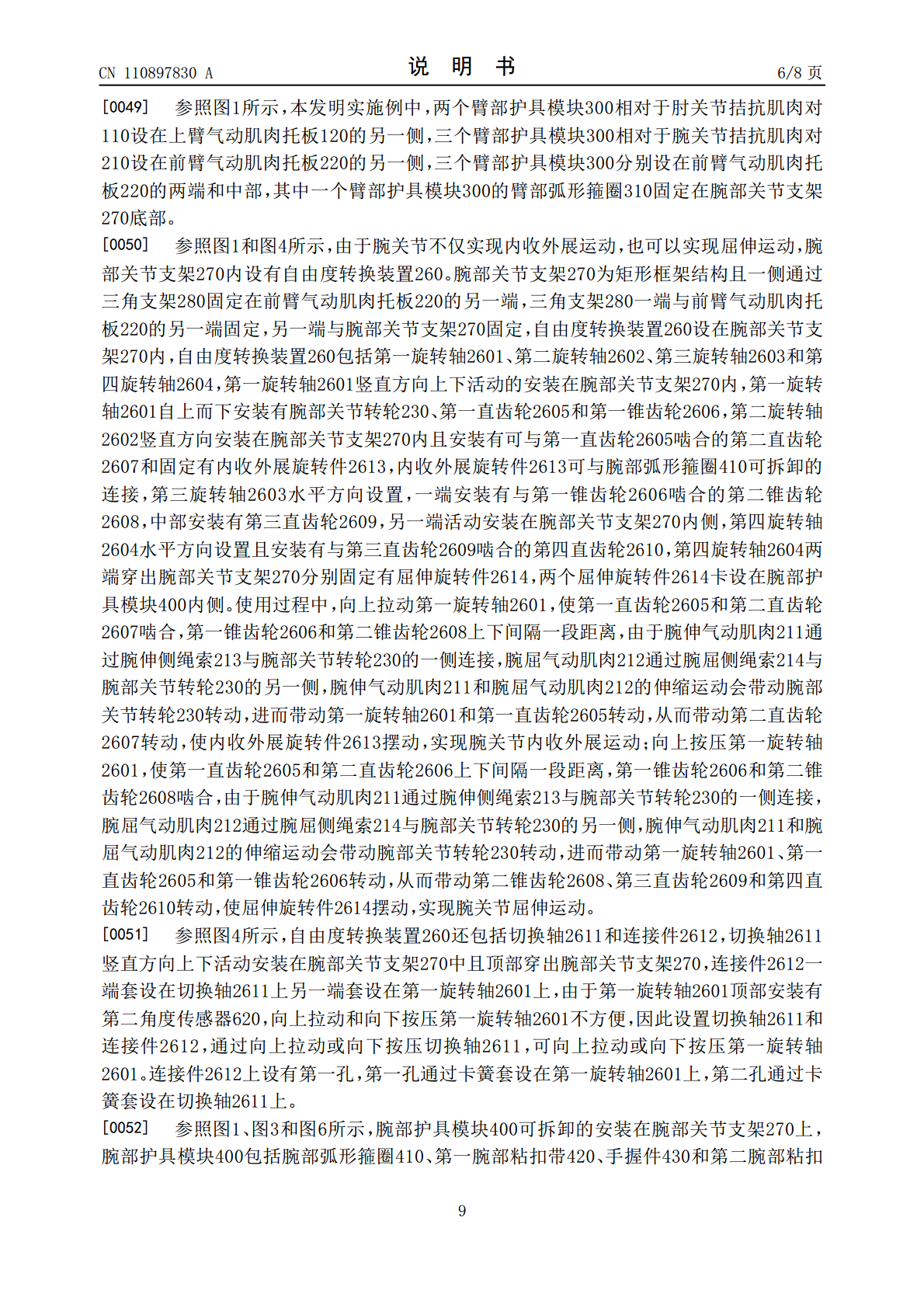
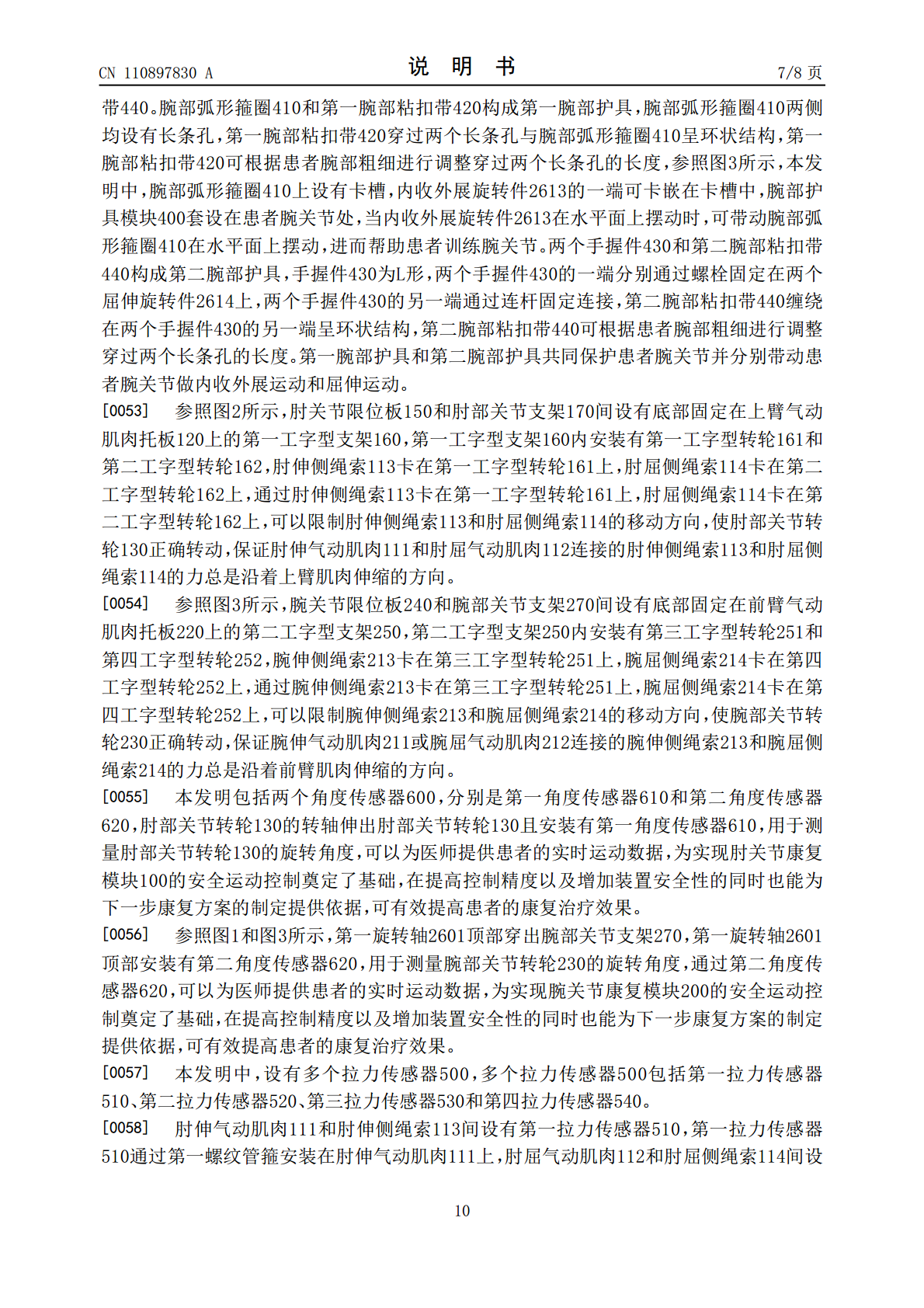
本发明公开了一种气动肌肉驱动的模块化外骨骼肘腕康复机器人,包括肘关节康复模块、腕关节康复模块、臂部护具模块和腕部护具模块,多个臂部护具模块可拆卸的安装在肘关节康复模块上用于将患者上臂和肘关节康复模块连接,帮助患者训练肘部,多个臂部护具模块和腕部护具模块可拆卸的安装在腕关节康复模块上用于将患者前臂、手部和腕关节康复模块连接,帮助患者训练腕部,本发明提供的一种气动肌肉驱动的模块化外骨骼肘腕康复机器人,各个模块可拆卸的连接,使用方便,具有很强的实用性和适用性,且采用气动肌肉作为驱动器,通过绳索以及转向轮的配合实
一种气动肌肉驱动的上肢外骨骼机器人.pdf
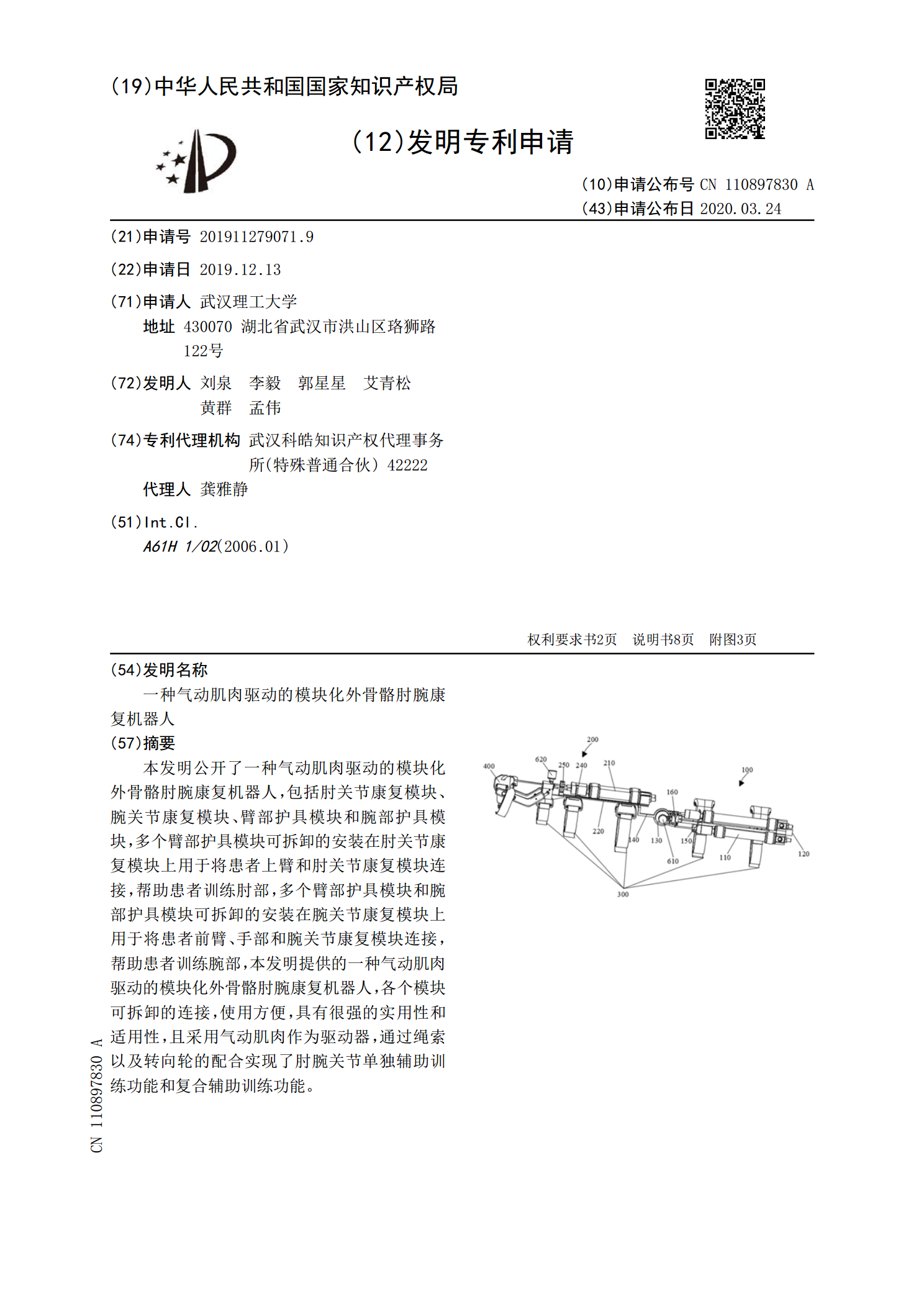
本发明涉及机器人系统设计技术领域,一种气动肌肉驱动的上肢外骨骼机器人,包括背部支架和上臂。所述的上臂通过肩背连接件固定在背部支架上,背部支架对上臂起连接和支撑作用。肢外骨骼机器人的结构以背部支架中心线左右对称。所述背部支架包括框架结构、滑轮、肩背连接件和肩关节驱动肌肉,滑轮固定在框架结构上侧;所述上臂包括闭锁式球关节、上臂外侧夹板、上臂内侧夹板、上臂滑轮、肘关节定轮、串联驱动肌肉;所述的闭锁式球关节固定在肩背连接件上端下表面。本发明的有益效果为:以气动肌肉作为驱动,相比于电机和液压驱动也大大降低了结构复杂

气动肌肉驱动的下肢康复外骨骼系统研究的中期报告.docx
气动肌肉驱动的下肢康复外骨骼系统研究的中期报告一、研究背景随着人口老龄化加速和发病率上升,下肢失能等疾病的治疗与康复管理的需求日益增长。目前,基于机器人技术的下肢康复外骨骼系统已经成为康复领域的研究热点,为失能或受伤患者提供了一种全新的康复途径。然而,当前的下肢康复外骨骼系统还存在一些缺陷,如操作复杂、体积大、成本高等问题。为此,我们设计了一种气动肌肉驱动的下肢康复外骨骼系统,旨在提高系统的运动性能和使用便利性。二、研究内容和方法1.研究内容本研究旨在研发一种气动肌肉驱动的下肢康复外骨骼系统,包括系统的设
一种气动肌肉驱动的下肢外骨骼助力装置.pdf
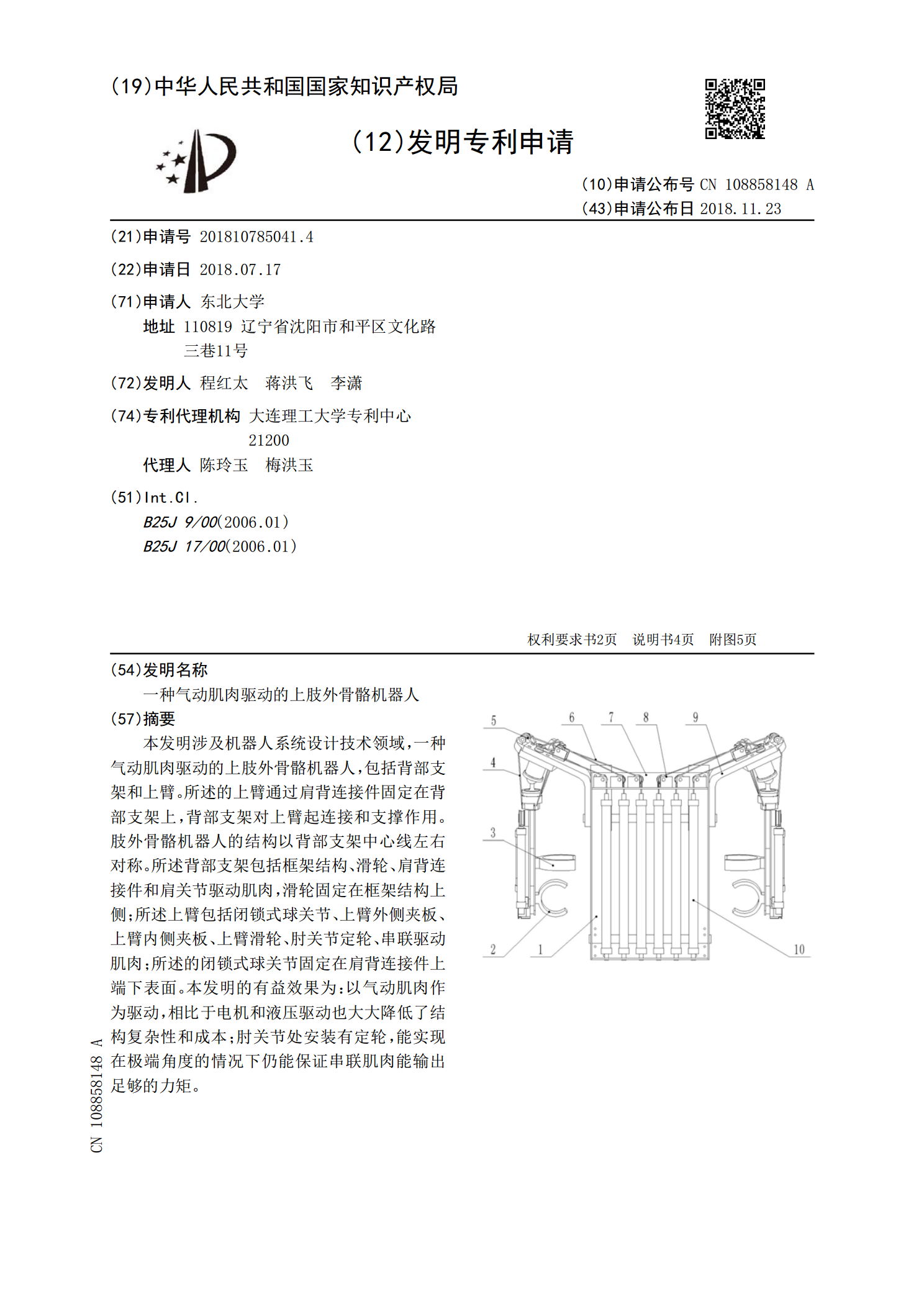
本发明公开了一种气动肌肉驱动的下肢外骨骼助力装置,包括依次相连的控制箱、背部装置、腰部装置、下肢装置和脚部装置;腰部装置包括旋转构件及伸长构件,旋转构件提供一个辅助自由度并设有安全限位挡扣,改变伸长构件的孔间配合可以调整腰部装置的长度;下肢装置采用滑轮钢丝绳型的气动肌肉双对拉式结构,通过两个气动肌肉对偶拉动钢丝绳,利用柔性钢丝绳与滑轮间的摩擦力带动滑轮转动从而实现关节驱动;控制箱根据操作人员的运动意图闭环控制各关节转动,从而带动腿部运动达到助力目的。本发明具有结构简单、尺寸可调、灵活安全、稳定可靠等优点,
一种气动肌肉驱动的柔性膝关节外骨骼.pdf
本申请公开了一种气动肌肉驱动的柔性膝关节外骨骼,涉及智能装备、机器人、穿戴装备领域,包括大腿固定板、小腿固定板、仿生关节、气动肌肉模块;仿生关节连接于大腿固定板和小腿固定板之间,以使大腿固定板和小腿固定板之间的瞬心轨迹与膝盖的顺心轨迹一致;气动肌肉模块包括气动肌肉、第一钢丝绳、第二钢丝绳、联动机构,气动肌肉连接于大腿固定板正对大腿正面位置,第一钢丝绳的一端连接于气动肌肉的输出端、另一端与联动机构连接,第二钢丝绳的一端与联动机构连接、另一端与小腿固定板连接,气动肌肉用于驱动第一钢丝绳运动来驱动联动机构运动、