
智能测距轮系统及其测距方法.pdf

文光****iu


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

智能测距轮系统及其测距方法.pdf
本公开内容公开了用于智能测距轮系统的测距方法及智能测距轮系统,所述测距方法包括:对待测目标进行实时距离测量,以生成距离信息;生成与距离信息相对应的旋转角度信息;基于旋转角度信息以及与待测目标相对应的图形模型,对待测目标执行角度偏差补偿;生成补偿后的待测目标的轨迹图。所公开的测距方法及智能测距轮系统能够直观的还原测量场景,结合轨迹图上表示的距离信息可以更可靠的对数据进行存储。
脉冲式激光测距系统及其测距方法.pdf
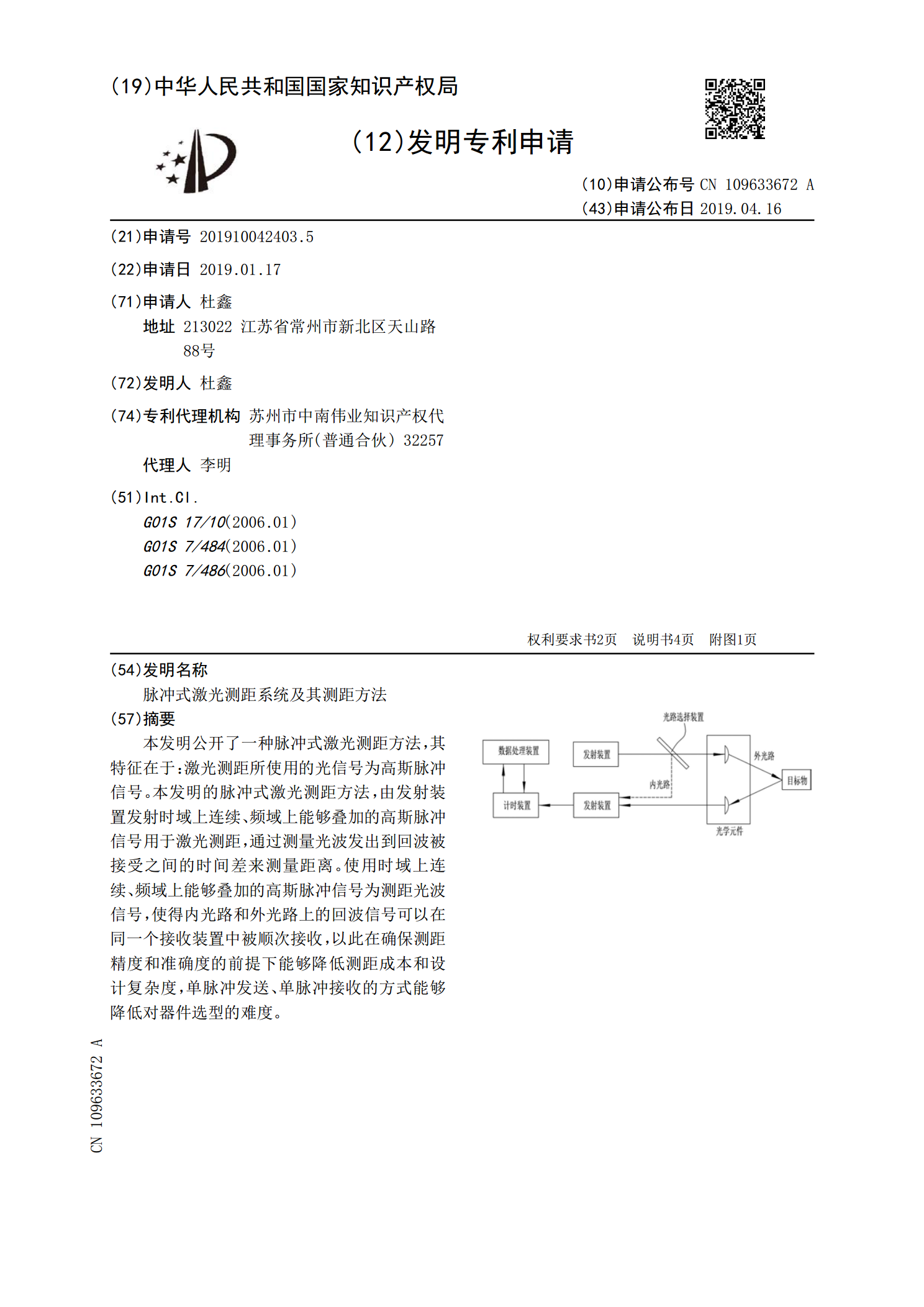
本发明公开了一种脉冲式激光测距方法,其特征在于:激光测距所使用的光信号为高斯脉冲信号。本发明的脉冲式激光测距方法,由发射装置发射时域上连续、频域上能够叠加的高斯脉冲信号用于激光测距,通过测量光波发出到回波被接受之间的时间差来测量距离。使用时域上连续、频域上能够叠加的高斯脉冲信号为测距光波信号,使得内光路和外光路上的回波信号可以在同一个接收装置中被顺次接收,以此在确保测距精度和准确度的前提下能够降低测距成本和设计复杂度,单脉冲发送、单脉冲接收的方式能够降低对器件选型的难度。
激光测距方法、激光测距系统及其激光雷达系统.pdf
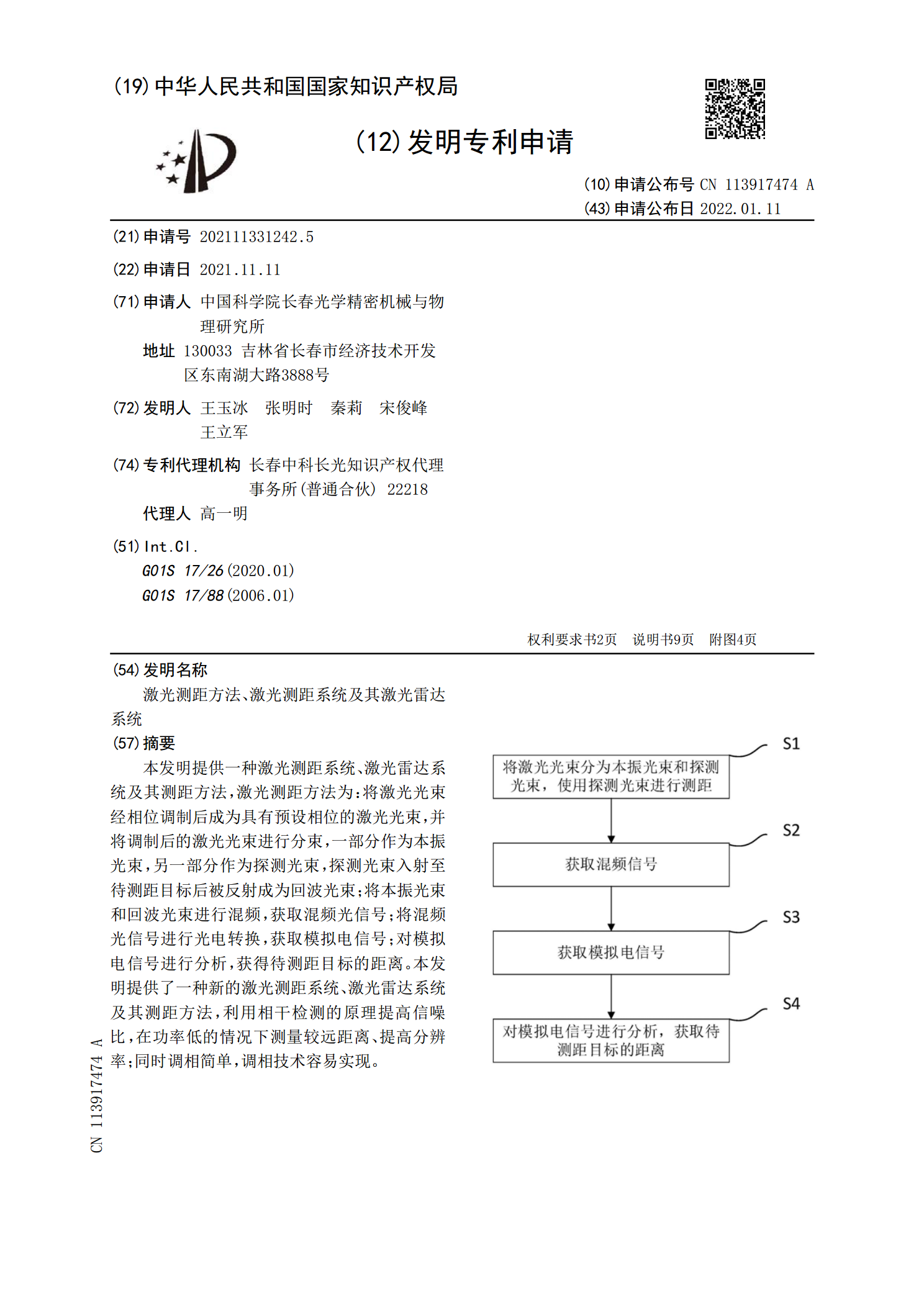
本发明提供一种激光测距系统、激光雷达系统及其测距方法,激光测距方法为:将激光光束经相位调制后成为具有预设相位的激光光束,并将调制后的激光光束进行分束,一部分作为本振光束,另一部分作为探测光束,探测光束入射至待测距目标后被反射成为回波光束;将本振光束和回波光束进行混频,获取混频光信号;将混频光信号进行光电转换,获取模拟电信号;对模拟电信号进行分析,获得待测距目标的距离。本发明提供了一种新的激光测距系统、激光雷达系统及其测距方法,利用相干检测的原理提高信噪比,在功率低的情况下测量较远距离、提高分辨率;同时调相
快速周扫定向测距的红外告警系统及其测距方法.pdf
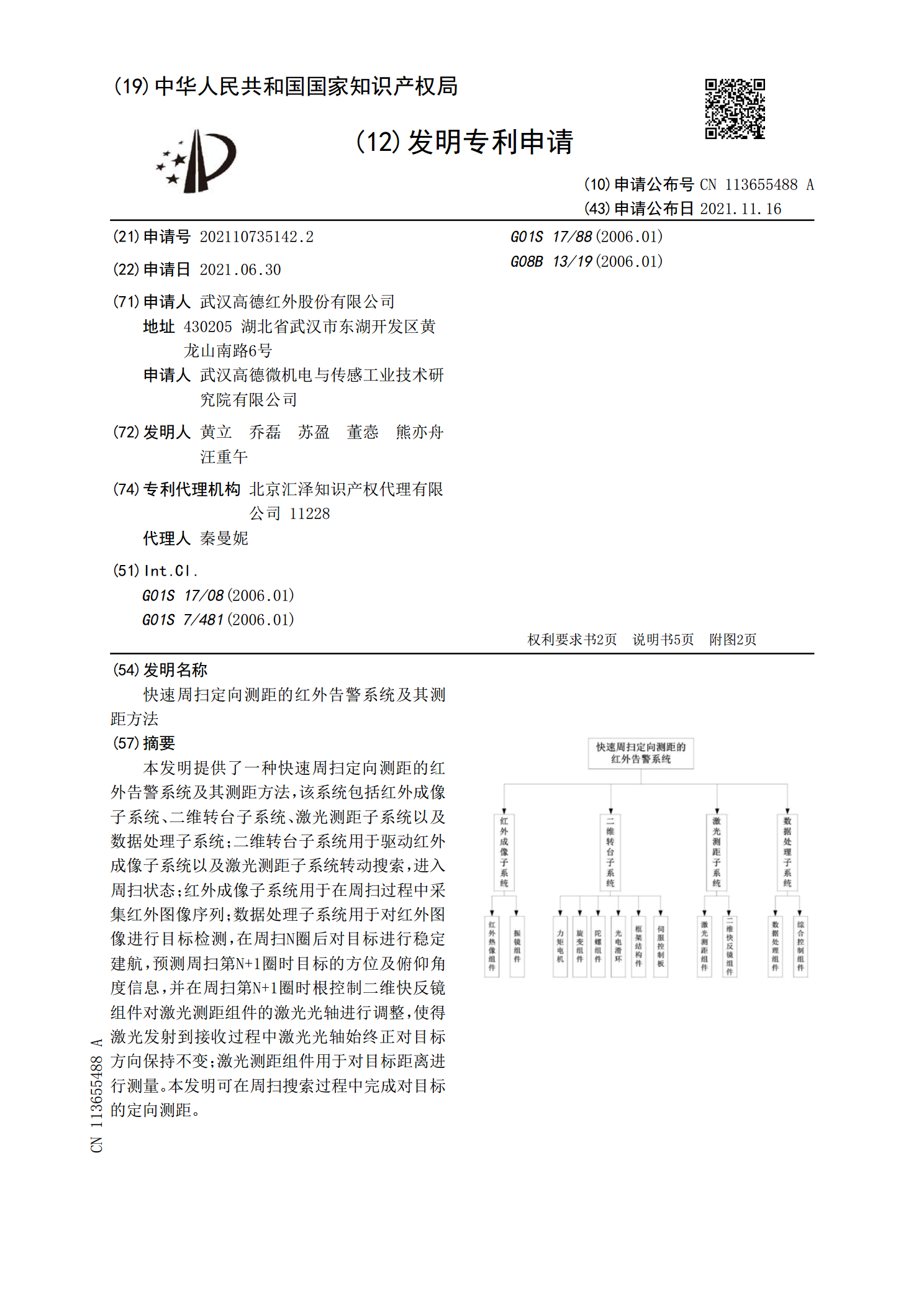
本发明提供了一种快速周扫定向测距的红外告警系统及其测距方法,该系统包括红外成像子系统、二维转台子系统、激光测距子系统以及数据处理子系统;二维转台子系统用于驱动红外成像子系统以及激光测距子系统转动搜索,进入周扫状态;红外成像子系统用于在周扫过程中采集红外图像序列;数据处理子系统用于对红外图像进行目标检测,在周扫N圈后对目标进行稳定建航,预测周扫第N+1圈时目标的方位及俯仰角度信息,并在周扫第N+1圈时根控制二维快反镜组件对激光测距组件的激光光轴进行调整,使得激光发射到接收过程中激光光轴始终正对目标方向保持不

测距模块、测距系统和控制测距模块的方法.pdf
本发明涉及通过利用ToF方法执行测距的测距系统精确地测量距离。测距模块包括受光单元、判定单元和测距单元。受光单元接收来自物体的反射光,并每当经过预定检测时段时检测预定检测时段内的反射光的受光量。判定单元判定物体是否在每个预定检测时段期间移动。测距单元基于在物体被判定出没有移动时的预定检测时段内的受光量来测量至物体的距离。