
车辆用制动控制装置.pdf

佳宁****么啦

1/10

2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆用制动装置及车辆用制动装置的控制方法.pdf
本发明提供一种BBW式的制动装置,在从动油缸(42)无法工作的情况下,在主油缸(11)最初工作时打开主截油阀(32、33)而将制动液填充到液压调节器(23)的贮液室(53)中,通过在关闭主截油阀(32、33)的状态下驱动液压泵(55)而将填充在贮液室(53)中的制动液加压,来使车轮油缸(26、27;30、31)工作。由于通过填充贮液室(53)可以增加主截油阀(32、33)的下游侧的制动液的液量,因此可以驱动液压泵(55)而将贮液室(53)的制动液加压,用液压调节器产生比主油缸所产生的制动液压更高的制动液压

车辆用制动装置及车辆用制动装置的控制方法.pdf
一种车辆用制动装置及车辆用制动装置的控制方法,在BBW式的制动装置中,能够采用具备单个液压室的简单结构的从动缸,并且实现两个制动系统中一个系统失灵时的备用。关闭主截止阀(32)并打开连通控制阀(41),使第一、第二液路(Pb、Qb)都与从动缸(42)连接,由此不需要串联式的从动缸而可使结构简化。且在电源失灵时,通过打开主截止阀(32)关闭连通控制阀(41),而利用主缸(11)的第一、第二液压室(17、19)产生的制动液压分别使第一、第二系统的车轮缸(26、27、30、31)动作。此时,由于隔断第一、第二液

车辆用制动控制装置.pdf
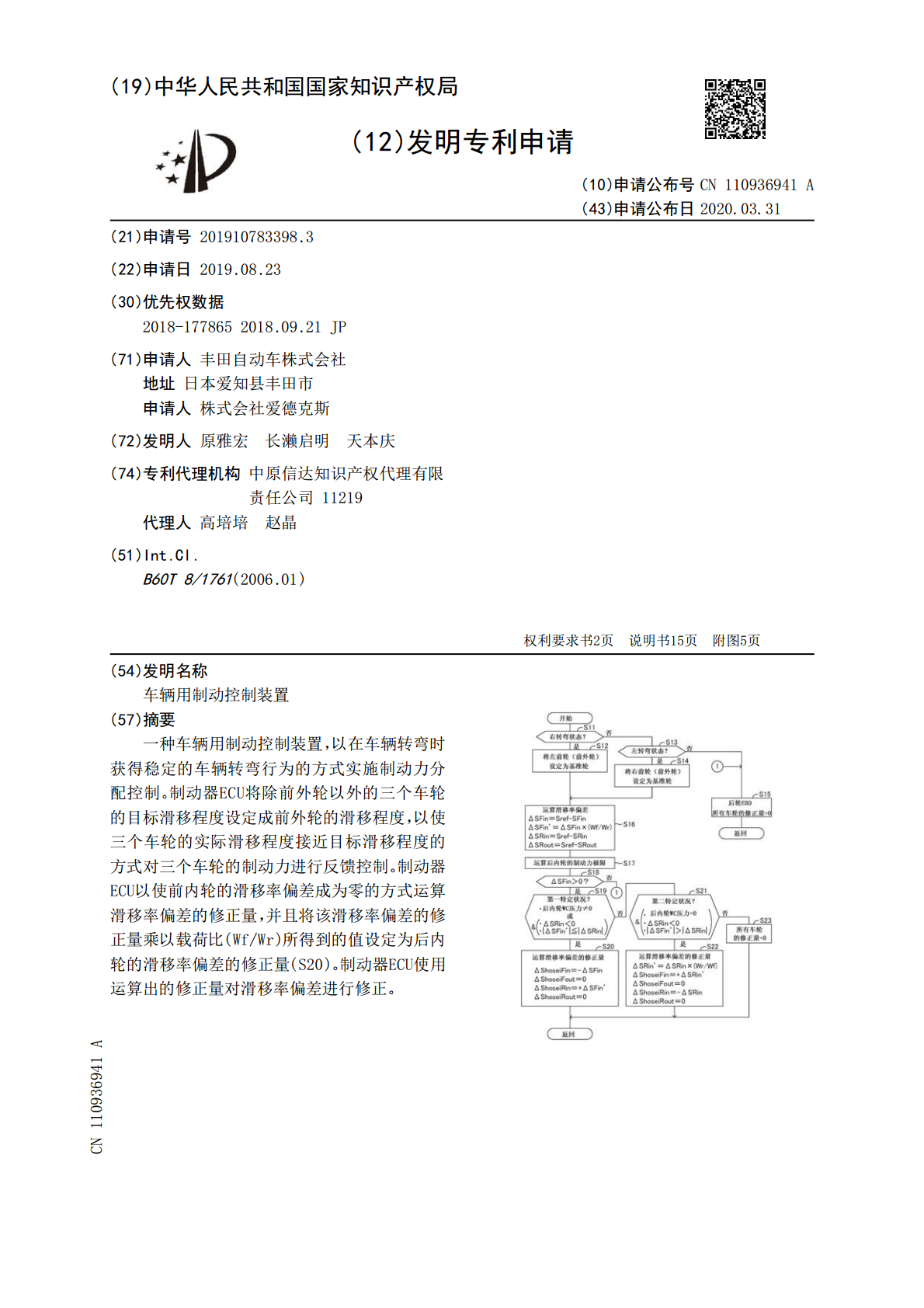
一种车辆用制动控制装置,以在车辆转弯时获得稳定的车辆转弯行为的方式实施制动力分配控制。制动器ECU将除前外轮以外的三个车轮的目标滑移程度设定成前外轮的滑移程度,以使三个车轮的实际滑移程度接近目标滑移程度的方式对三个车轮的制动力进行反馈控制。制动器ECU以使前内轮的滑移率偏差成为零的方式运算滑移率偏差的修正量,并且将该滑移率偏差的修正量乘以载荷比(Wf/Wr)所得到的值设定为后内轮的滑移率偏差的修正量(S20)。制动器ECU使用运算出的修正量对滑移率偏差进行修正。

车辆用制动控制装置.pdf
本发明提供一种车辆用制动控制装置,无论制动踏板的操作状况如何,均能消除乘客的操作认知与车辆的行为的乖离。具备:检测制动踏板的行程的行程传感器;产生制动踏板的反力的反力赋予部;产生对车轮的制动力的制动力产生部;以及能控制反力赋予部和制动力产生部的ECU;ECU具有根据作为制动踏板的反力与制动踏板的操作量之比的制动刚性、和车辆的减速度来设定制动刚性特性的制动刚性特性设定部;制动刚性特性设定部以车辆的减速度越大制动刚性越增加的形式设定制动刚性特性;ECU基于制动刚性特性控制反力赋予部。
车辆用制动控制装置.pdf
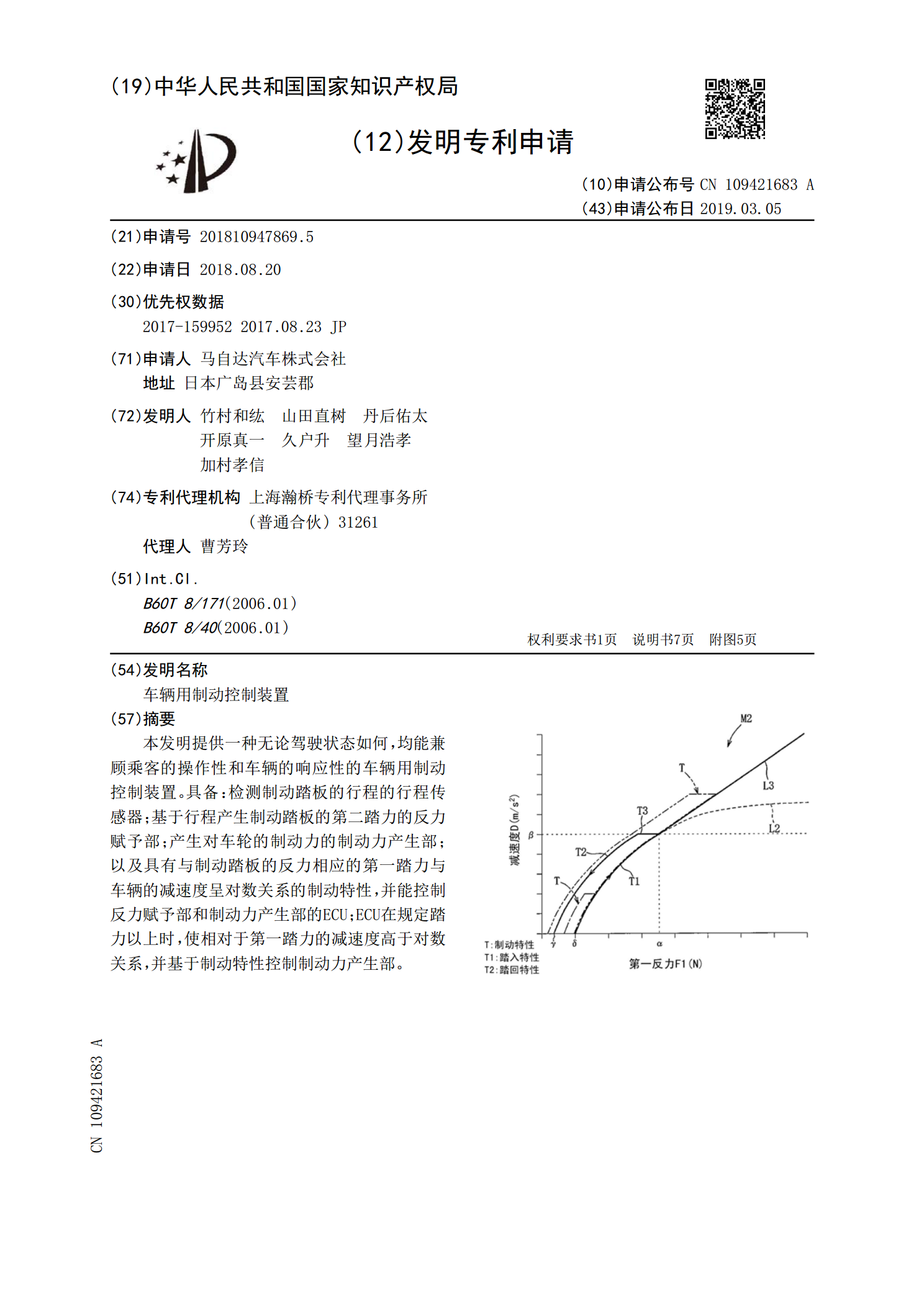
本发明提供一种无论驾驶状态如何,均能兼顾乘客的操作性和车辆的响应性的车辆用制动控制装置。具备:检测制动踏板的行程的行程传感器;基于行程产生制动踏板的第二踏力的反力赋予部;产生对车轮的制动力的制动力产生部;以及具有与制动踏板的反力相应的第一踏力与车辆的减速度呈对数关系的制动特性,并能控制反力赋予部和制动力产生部的ECU;ECU在规定踏力以上时,使相对于第一踏力的减速度高于对数关系,并基于制动特性控制制动力产生部。