
一种自动对准装置及方法.pdf

康平****ng

1/10
2/10

3/10
4/10

5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动对准装置及方法.pdf
本发明公开了一种自动对准装置,包括轴箱固定支撑挂架、拧紧轴固定转箱、轴箱伺服驱动电机,与所述轴箱固定支撑挂架相连接,可驱动所述拧紧轴固定转箱转动;拧紧轴轴箱实时摄像位置反馈模块,与所述轴箱固定支撑挂架相连接,可拍摄置于所述滑轨下运动的轮对孔位图像;定位装置,与所述轴箱固定支撑挂架相连接;可采集所述轮对的位置信息,与拍摄的轮对孔位图像进行匹配,并控制轴箱伺服驱动电机动作,驱动所述拧紧轴固定转箱转动,实现拧紧轴固定转箱与轮对孔位的自动对准。本发明还公开了一种自动对准方法。本发明的自动对准装置自动完成了对多个轮
一种对准结构、对准方法及对准装置.pdf
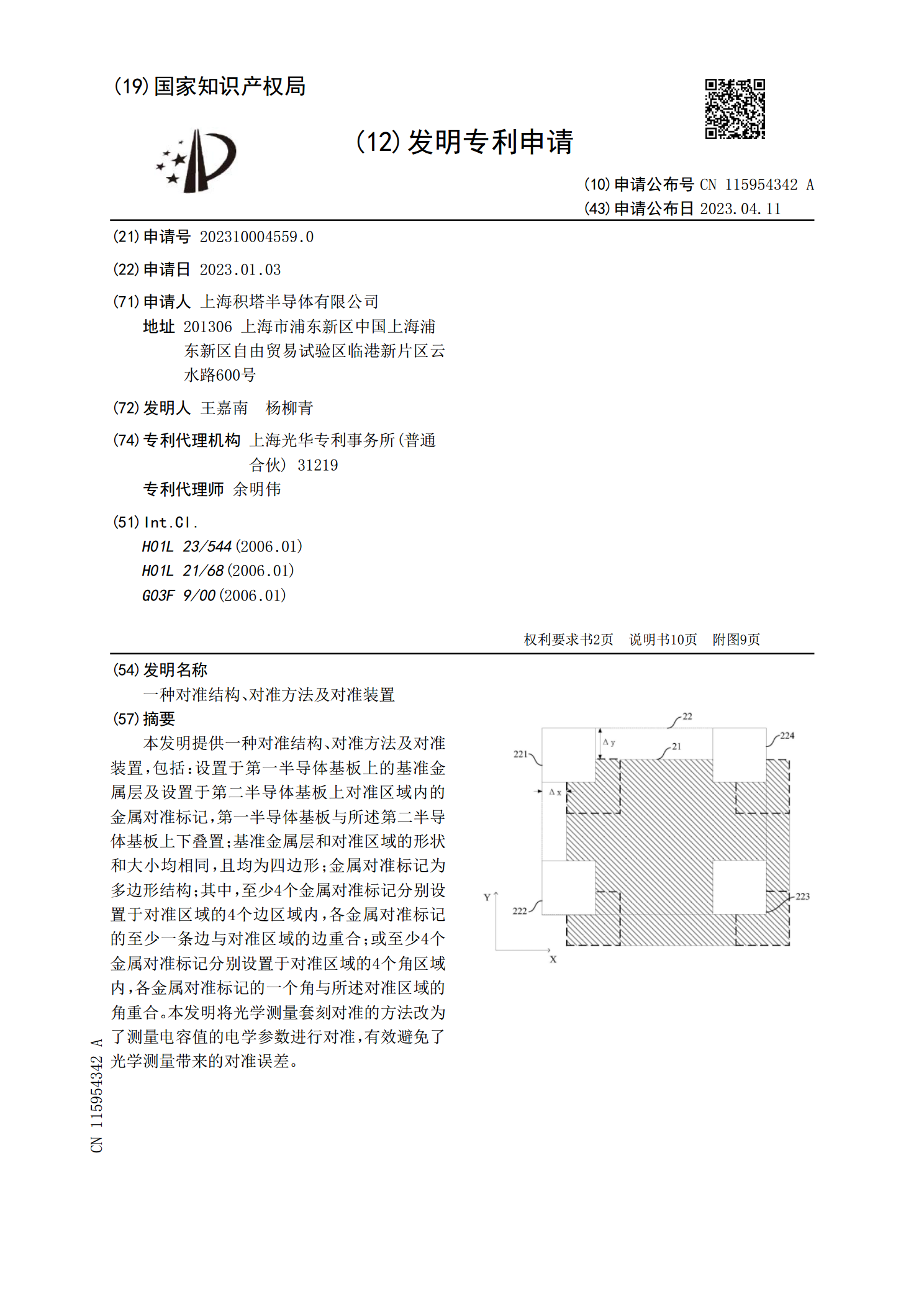
本发明提供一种对准结构、对准方法及对准装置,包括:设置于第一半导体基板上的基准金属层及设置于第二半导体基板上对准区域内的金属对准标记,第一半导体基板与所述第二半导体基板上下叠置;基准金属层和对准区域的形状和大小均相同,且均为四边形;金属对准标记为多边形结构;其中,至少4个金属对准标记分别设置于对准区域的4个边区域内,各金属对准标记的至少一条边与对准区域的边重合;或至少4个金属对准标记分别设置于对准区域的4个角区域内,各金属对准标记的一个角与所述对准区域的角重合。本发明将光学测量套刻对准的方法改为了测量电容
一种图像对准方法及装置.pdf
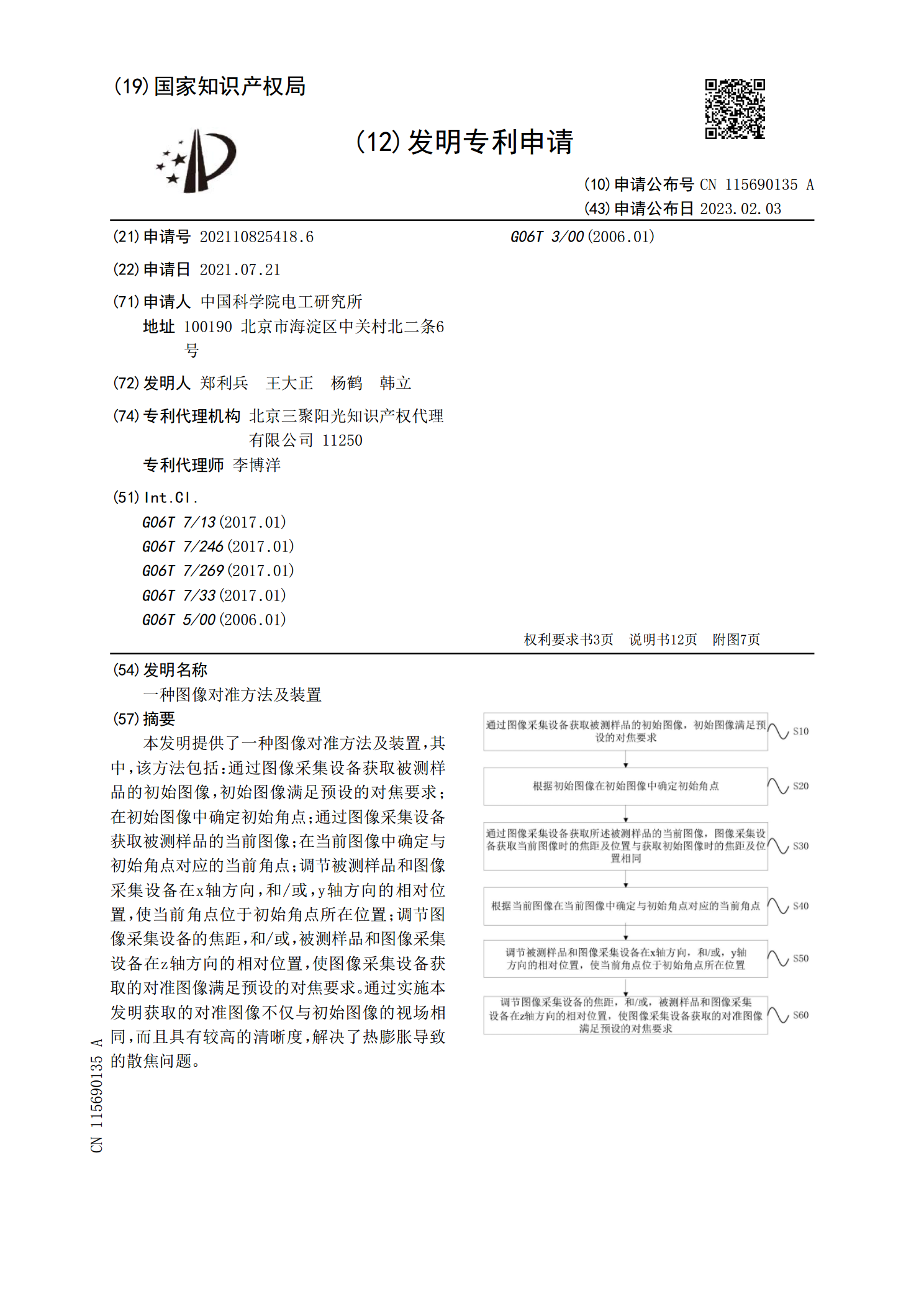
本发明提供了一种图像对准方法及装置,其中,该方法包括:通过图像采集设备获取被测样品的初始图像,初始图像满足预设的对焦要求;在初始图像中确定初始角点;通过图像采集设备获取被测样品的当前图像;在当前图像中确定与初始角点对应的当前角点;调节被测样品和图像采集设备在x轴方向,和/或,y轴方向的相对位置,使当前角点位于初始角点所在位置;调节图像采集设备的焦距,和/或,被测样品和图像采集设备在z轴方向的相对位置,使图像采集设备获取的对准图像满足预设的对焦要求。通过实施本发明获取的对准图像不仅与初始图像的视场相同,而且
全自动探针台图像定位装置及视觉对准方法.pdf
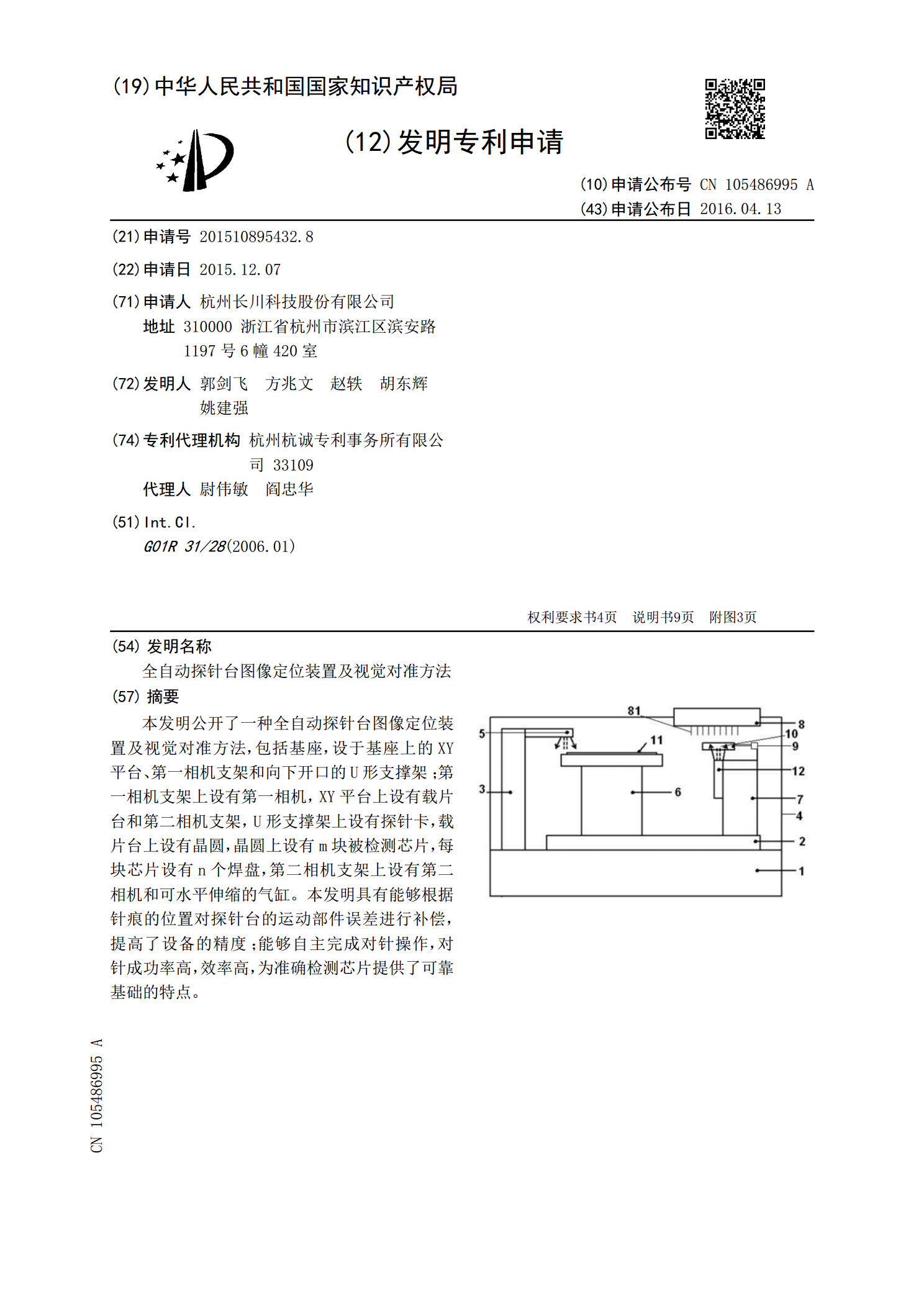
本发明公开了一种全自动探针台图像定位装置及视觉对准方法,包括基座,设于基座上的XY平台、第一相机支架和向下开口的U形支撑架;第一相机支架上设有第一相机,XY平台上设有载片台和第二相机支架,U形支撑架上设有探针卡,载片台上设有晶圆,晶圆上设有m块被检测芯片,每块芯片设有n个焊盘,第二相机支架上设有第二相机和可水平伸缩的气缸。本发明具有能够根据针痕的位置对探针台的运动部件误差进行补偿,提高了设备的精度;能够自主完成对针操作,对针成功率高,效率高,为准确检测芯片提供了可靠基础的特点。
光敏式自动对准光源装置.pdf
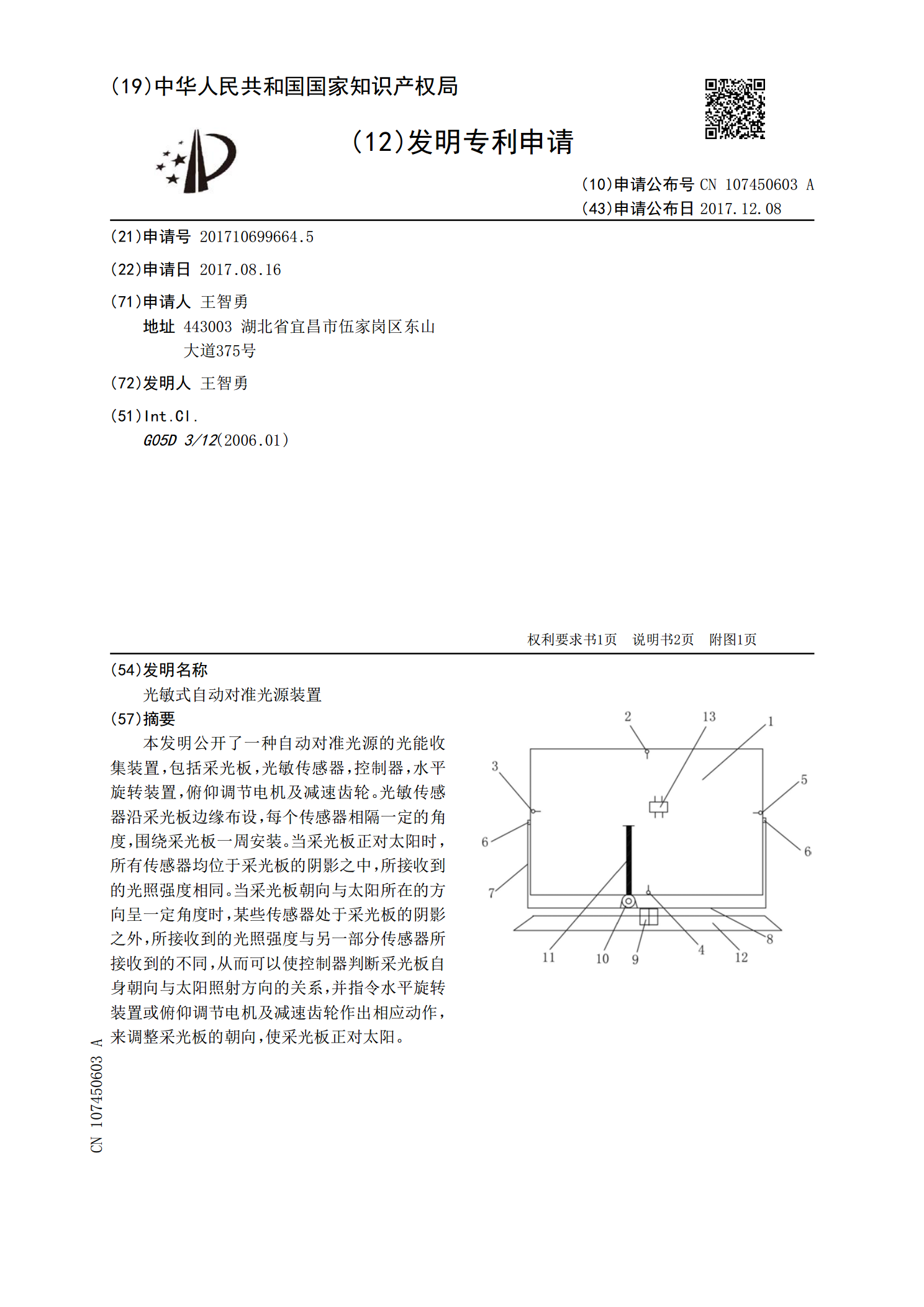
本发明公开了一种自动对准光源的光能收集装置,包括采光板,光敏传感器,控制器,水平旋转装置,俯仰调节电机及减速齿轮。光敏传感器沿采光板边缘布设,每个传感器相隔一定的角度,围绕采光板一周安装。当采光板正对太阳时,所有传感器均位于采光板的阴影之中,所接收到的光照强度相同。当采光板朝向与太阳所在的方向呈一定角度时,某些传感器处于采光板的阴影之外,所接收到的光照强度与另一部分传感器所接收到的不同,从而可以使控制器判断采光板自身朝向与太阳照射方向的关系,并指令水平旋转装置或俯仰调节电机及减速齿轮作出相应动作,来调整采