
一种轮胎吊机器视觉自动纠偏偏差测量方法.pdf

努力****绮亦


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮胎吊机器视觉自动纠偏偏差测量方法.pdf
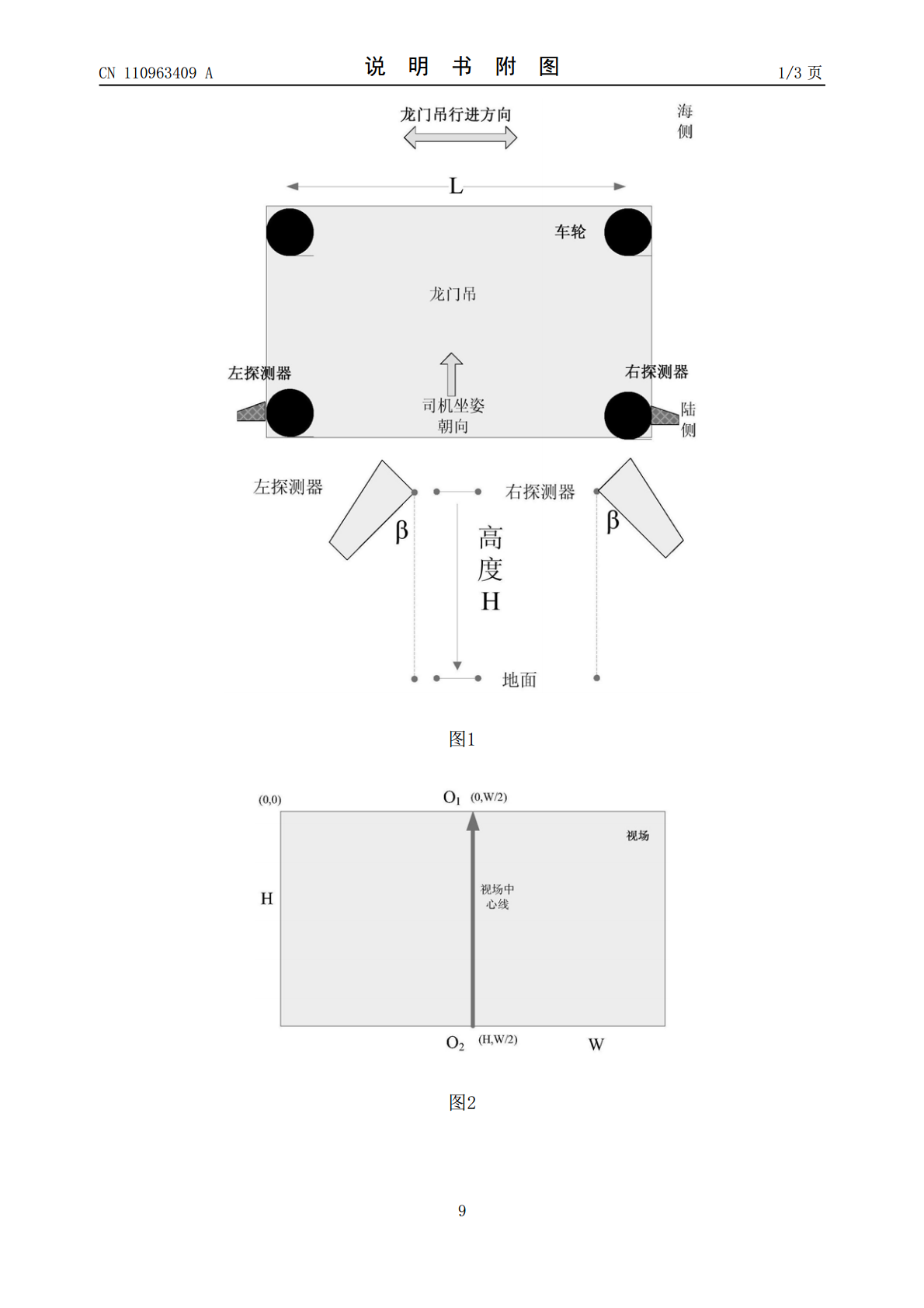
本发明涉及一种轮胎吊机器视觉自动纠偏偏差测量方法,通过下述方式实现:在轮胎吊陆侧两个轮组前方安装左右探测器,满足探测器成像中路面两条行进线的像素分辨率优于2毫米;对左右探测器进行标定,确定探测器图像中像素坐标与其对应的地面测量坐标系位置关系;所述的地面测量坐标系原点为左/探测器底面投影点,Y轴为探测器的视场中心线在地面投影,X轴为地面与Y轴垂直方向,定义趋向陆地的位置偏差为正;根据轮胎吊的当前行驶方向,从探测器图像中的路面行进线上任意选取两点,根据上述标定关系,由两点确定的直线与地面测量坐标系的关系确定轮

一种轮胎吊机器视觉自动纠偏系统及纠偏方法.pdf
本发明涉及一种轮胎吊机器视觉自动纠偏系统及纠偏方法,采集模块在轮胎吊行进过程中获取规定线路的图像;标定模块获取标定参照物特征部位分别在像素坐标系和实际坐标系下的坐标;坐标转换模块实现像素坐标系与实际坐标系之间的转换;预处理模块对采集模块的图像进行处理以获得特征清晰稳定的数据,线路识别模块,通过对图像中规定线路检测识别,确定实际行驶过程中实际线路与规定线路的方向偏差Δα和距离偏差Δd,并发送给PLC通讯模块;PLC通讯模块存储上述数据并发送给轮胎吊控制系统进行纠偏。本发明利用机器视觉技术,实现对轮胎吊大车行

一种基于机器视觉的轮胎吊行走系统自动纠偏方法.pdf
本发明公开了一种基于机器视觉的轮胎吊行走系统自动纠偏方法,选择轮胎吊一侧作为引导侧,在其前后分别安装一个摄像头并进行校准;采集图像并进行适当的预处理;建立BP神经网络并选取像素点集进行多次训练;挑选测试误差最小的网络对图像进行识别;将识别后的图像简化为一系列离散的点,采用Hough变换和最小二乘法进行直线检测并将所检测直线合并为一条作为规划路径;拼接前后摄像头的图像,并以拼接后图像的左上角为原点建立新的坐标系并重新建立两条规划路径方程;计算两条规划路径在极坐标参数空间的欧氏距离,若距离大于设定值,则重新校

一种轮胎吊大车自动纠偏方法.pdf
本发明实施例涉及港口机械领域,公开了一种轮胎吊大车自动纠偏方法。该方法包括:计算轮胎吊大车当前的运行偏差D;其中,运行偏差D为当前大车的实时坐标点与轨迹基准线之间的距离;根据所述运行偏差D及大车纠偏输出量的比例系数k,得到所述纠偏量;根据纠偏量,控制所述大车的驱动轮,以使大车直线行走。本发明实施方式相对于现有技术而言,结合大车的实时运行偏差来计算纠偏量,能够更精确地判断出大车的实时运行方向和偏差趋势,从而更精准地进行纠偏量地计算,使得对大车的行驶方向的控制更加精确。同时,这种自动纠偏方法也节省了人工,减轻

轮胎吊直线行走的自动纠偏方法及其系统.pdf
本发明涉及港口机械领域,公开了一种轮胎吊直线行走的自动纠偏方法及其系统。本发明中,一种轮胎吊直线行走的自动纠偏方法包括:在轮胎吊的行走过程中,周期性地利用安装于轮胎吊上的电罗经检测轮胎吊的行走方向,并根据轮胎吊的行走方向检测轮胎吊的行走偏差,获取偏差角度;如果偏差角度不为零,则根据偏差角度生成控制信号,并将控制信号发送至轮胎吊驱动轮的驱动器;本发明中还提供的一种轮胎吊直线行走的自动纠偏系统包括:电罗经、控制器;通过这种轮胎吊直线行走的自动纠偏方法,使得轮胎吊可以实现自动纠偏,从而减轻轮胎吊工作人员的劳动强