
一种组合齿面活齿传动啮合副及其生成方法.pdf

邻家****mk

1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共50页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种组合齿面活齿传动啮合副及其生成方法.pdf
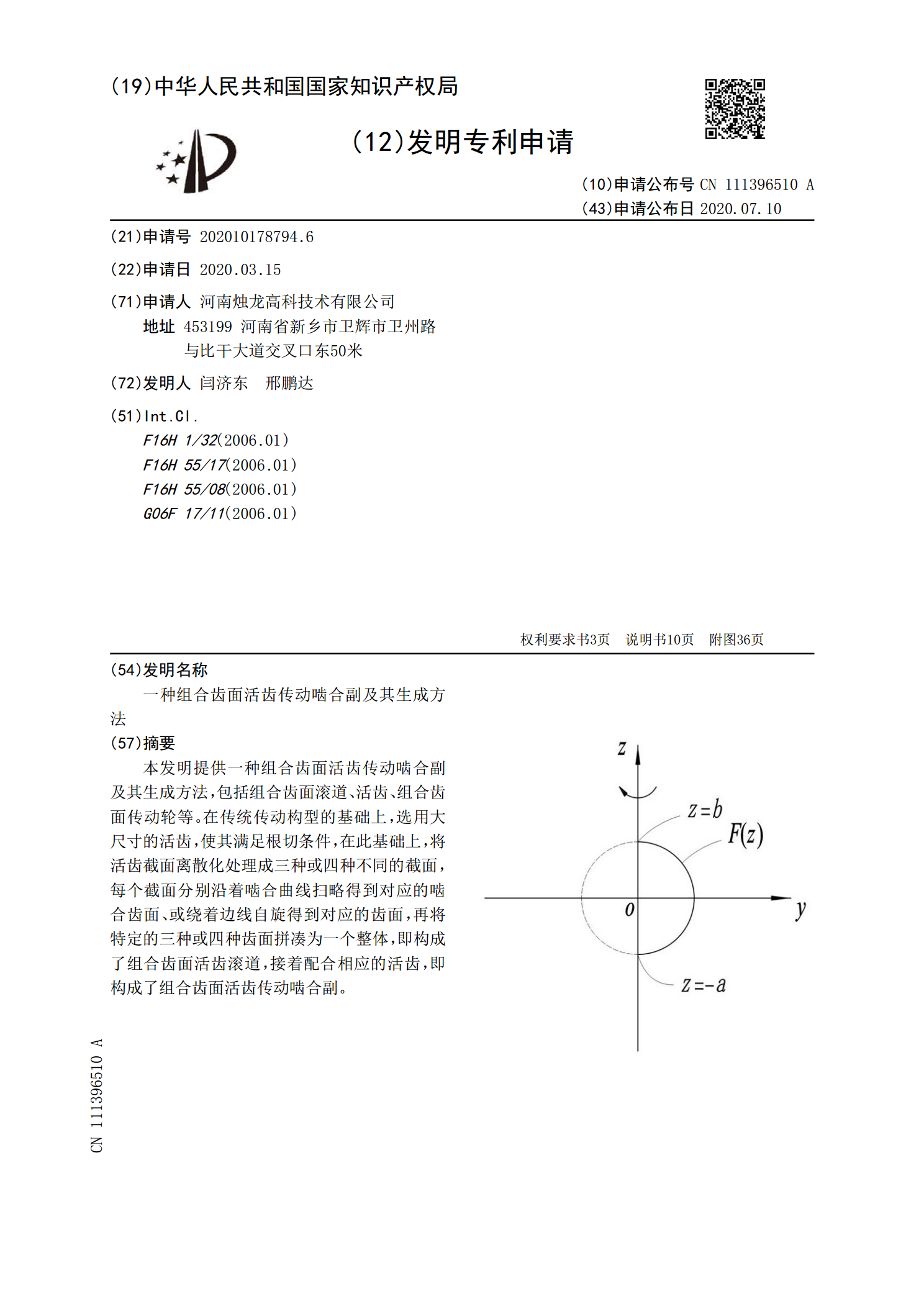
本发明提供一种组合齿面活齿传动啮合副及其生成方法,包括组合齿面滚道、活齿、组合齿面传动轮等。在传统传动构型的基础上,选用大尺寸的活齿,使其满足根切条件,在此基础上,将活齿截面离散化处理成三种或四种不同的截面,每个截面分别沿着啮合曲线扫略得到对应的啮合齿面、或绕着边线自旋得到对应的齿面,再将特定的三种或四种齿面拼凑为一个整体,即构成了组合齿面活齿滚道,接着配合相应的活齿,即构成了组合齿面活齿传动啮合副。

一种根切活齿传动啮合副及其生成方法.pdf
本发明提供一种根切活齿传动啮合副及其生成方法,包括活齿啮合齿面、活齿啮合曲线、根切活齿啮合齿面等。在活齿传动构型的基础上,选用大尺寸的活齿,使其满足根切条件,通过活齿面沿着啮合曲线扫略一周,进而得到具有根切特征的活齿啮合副,称其为该传动类型下的根切活齿啮合副;具有根切活齿啮合副特征的活齿传动单元,称为根切活齿传动单元;与同尺寸非根切的传统活齿传动单元相比,本发明的传动比和承载能力均显著性增大,综合性能优异性更加明显。

活齿传动啮合副的滑动情况研究.docx
活齿传动啮合副的滑动情况研究Title:StudyonSlidingConditionsinActiveToothedGearEngagementsAbstract:Gearsystemsareomnipresentinvariousindustrialapplications,enablingthetransmissionofrotarymotionandtorquebetweentwoormoreshafts.Understandingtheslidingconditionsbetweengearpa
一种多齿同时啮合的活齿传动装置.pdf
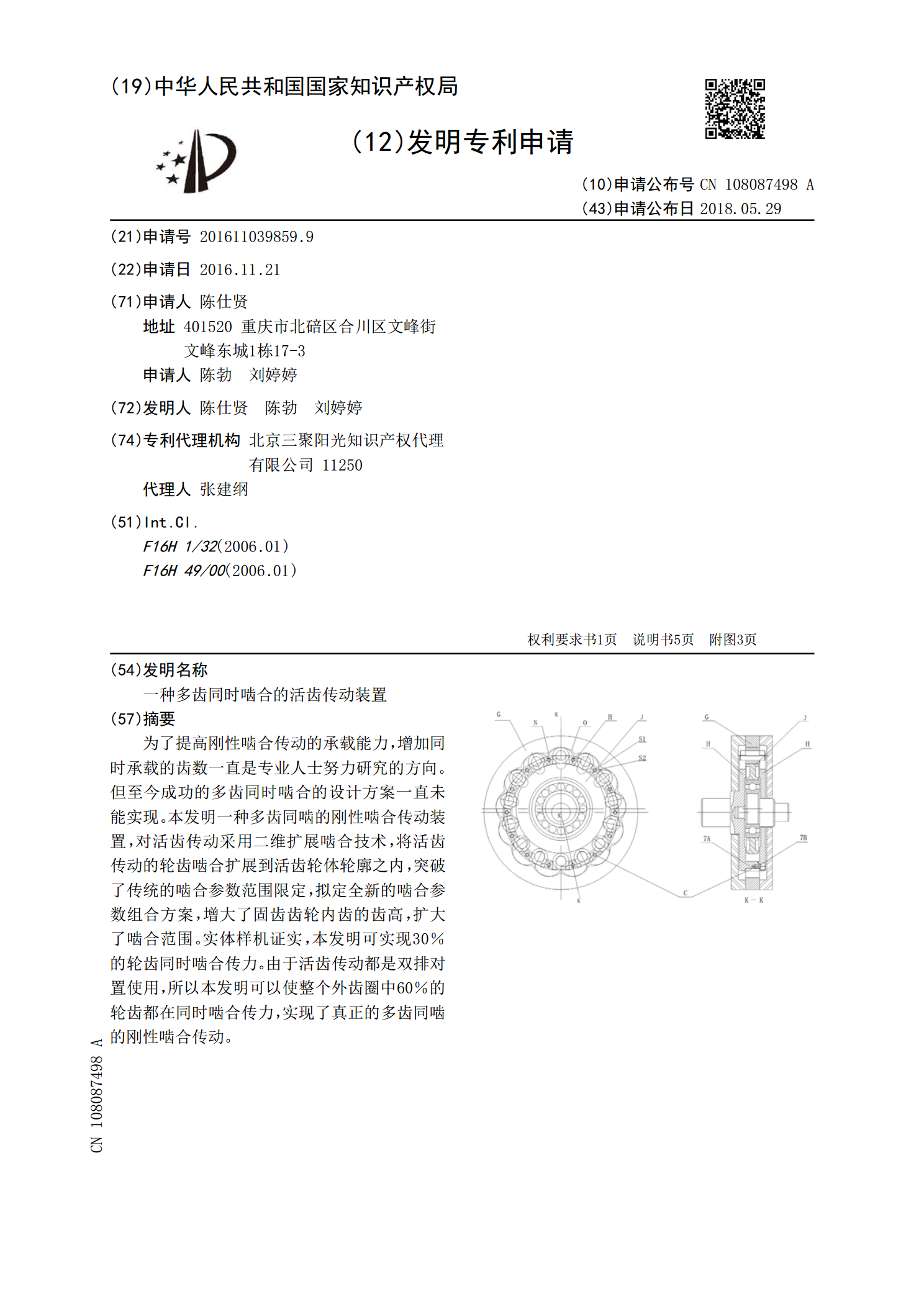
为了提高刚性啮合传动的承载能力,增加同时承载的齿数一直是专业人士努力研究的方向。但至今成功的多齿同时啮合的设计方案一直未能实现。本发明一种多齿同啮的刚性啮合传动装置,对活齿传动采用二维扩展啮合技术,将活齿传动的轮齿啮合扩展到活齿轮体轮廓之内,突破了传统的啮合参数范围限定,拟定全新的啮合参数组合方案,增大了固齿齿轮内齿的齿高,扩大了啮合范围。实体样机证实,本发明可实现30%的轮齿同时啮合传力。由于活齿传动都是双排对置使用,所以本发明可以使整个外齿圈中60%的轮齿都在同时啮合传力,实现了真正的多齿同啮的刚性啮
一种活齿传动总成中的活齿滑片滑块组合设计方法.pdf
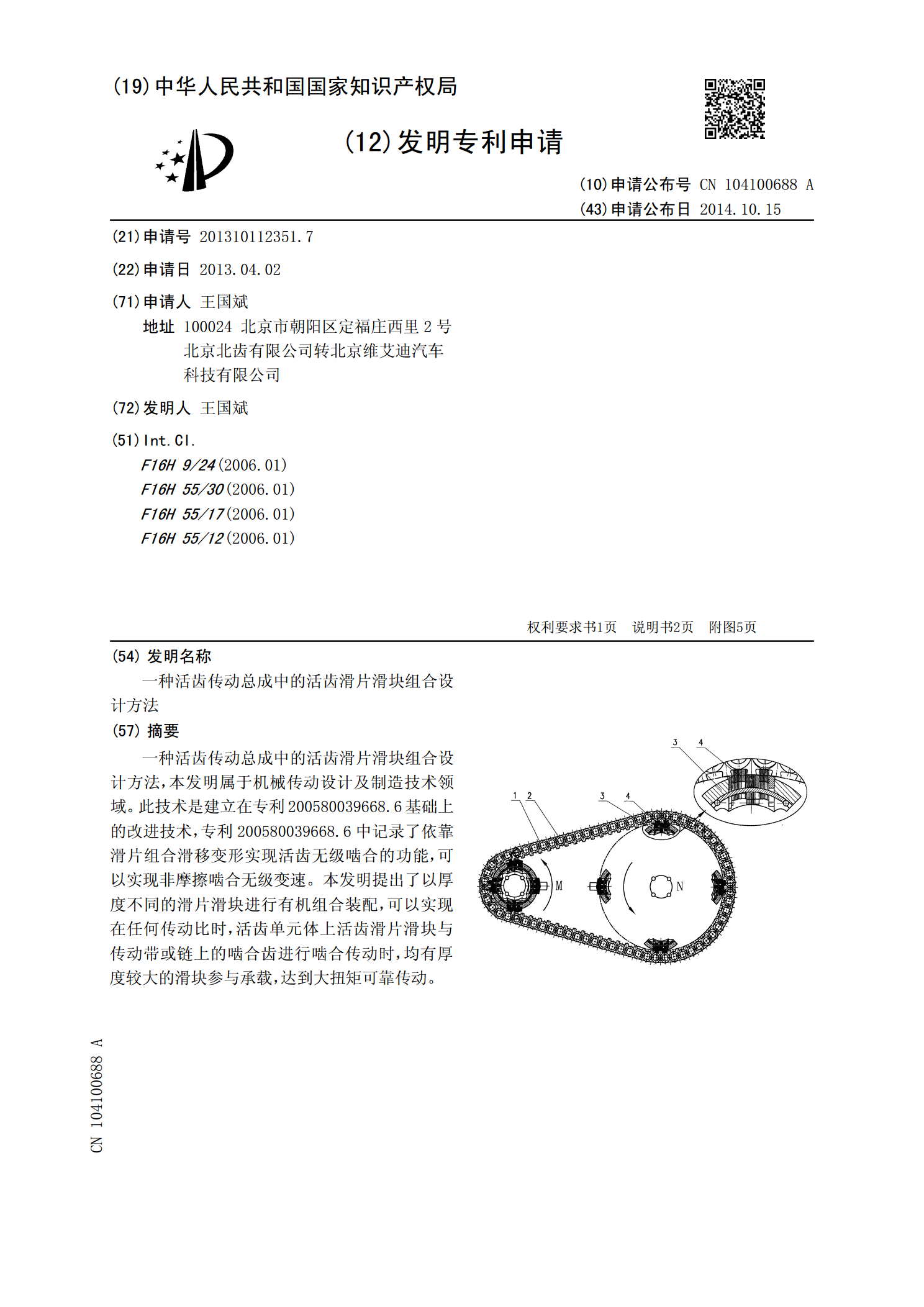
一种活齿传动总成中的活齿滑片滑块组合设计方法,本发明属于机械传动设计及制造技术领域。此技术是建立在专利200580039668.6基础上的改进技术,专利200580039668.6中记录了依靠滑片组合滑移变形实现活齿无级啮合的功能,可以实现非摩擦啮合无级变速。本发明提出了以厚度不同的滑片滑块进行有机组合装配,可以实现在任何传动比时,活齿单元体上活齿滑片滑块与传动带或链上的啮合齿进行啮合传动时,均有厚度较大的滑块参与承载,达到大扭矩可靠传动。