
一种电动轮椅助力控制系统及助力控制方法.pdf

景山****魔王

1/10

2/10
3/10
4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种电动轮椅助力控制系统及助力控制方法.pdf
本发明涉及一种电动轮椅助力控制系统及助力控制方法。所述电动轮椅助力控制系统,包括:陀螺仪传感器、第一压力传感器、第二压力传感器、手柄控制器和电机驱动器;陀螺仪传感器、第一压力传感器、第二压力传感器和电机驱动器均与手柄控制器连接;第一压力传感器安装在电动轮椅的左手推行接触的地方,第二压力传感器安装在电动轮椅的右手推行接触的地方,手柄控制器设置在轮椅上;电机驱动器分别与电动轮椅的左轮驱动电机和右轮驱动电机连接。本发明通过设置陀螺仪传感器、第一压力传感器、第二压力传感器、手柄控制器和电机驱动器,实现了电动轮椅在

电动助力轮椅.pdf
本发明涉及一种电动助力轮椅,是伤残人员和失去行动能力的老年人主要的辅助工具。本电动助力轮椅实现电机转动体与轮辐组合为一体的轮毂作为电机转子,而轮轴作为电机定子的结构,两个短操纵杆控制左右电机轮毂分别直接驱动左右主支撑大轮,取消了减速机的中间环节,加之电动助力轮椅的电源和控制装置是可拆卸的,制动器可手动解锁,大大简化了电动助力轮椅的机构和控制,使电动助力轮椅即具有普通轮椅那样的灵活性和折叠性,又克服了目前电动轮椅的设计缺陷,大量降低制造成本,使其能够普及到广大伤残人员和失去行动能力的老年。

助力装置的控制方法、装置及电动轮椅.pdf
本发明涉及电机控制技术领域,公开了一种助力装置的控制方法、装置及电动轮椅,通过分析助力装置的电机的转速检测信号得到每一时刻对应的转速检测结果,其中,转速检测信号由电机内设有的转速传感器来生成;当检测到电机在第一预设时间范围内加速时,则驱动电机以当前转动方向运行,使电机处于工作状态,因此无需在助力装置上设置摇杆即可实现助推,确保了助力装置的结构简单化。当电机处于工作状态时,在当前时刻的转速检测结果等于预设推行速度值时,停止驱动电机,使电机处于惯性状态,此时每当检测到电机在第二预设时间范围内不减速时,则增加预

一种汽车电动助力转向控制系统.pdf
本发明公开的一种汽车电动助力转向控制系统,包括:若干用于传输汽车实时信号的传感器,一用于采集所述传感器的信号和电机电流反馈信号并做出反应的电动助力转向主控制器MCU,一为所述主控制器MCU供电的第一电源芯片,一助力电机驱动电路,一助力电机,其特征在于,还包括一完全独立的用于实时监控所述电动助力转向主控制器MCU的输入输出及其程序运行状态的电动助力转向监控系统。由于采用了如上的技术方案,本发明的有益效果在于:有效避免了因控制器失效而引起助力转向控制系统无助力或者给出错误的助力而导致的交通事故;如若监控系统检
一种汽车电动助力转向控制系统.pdf
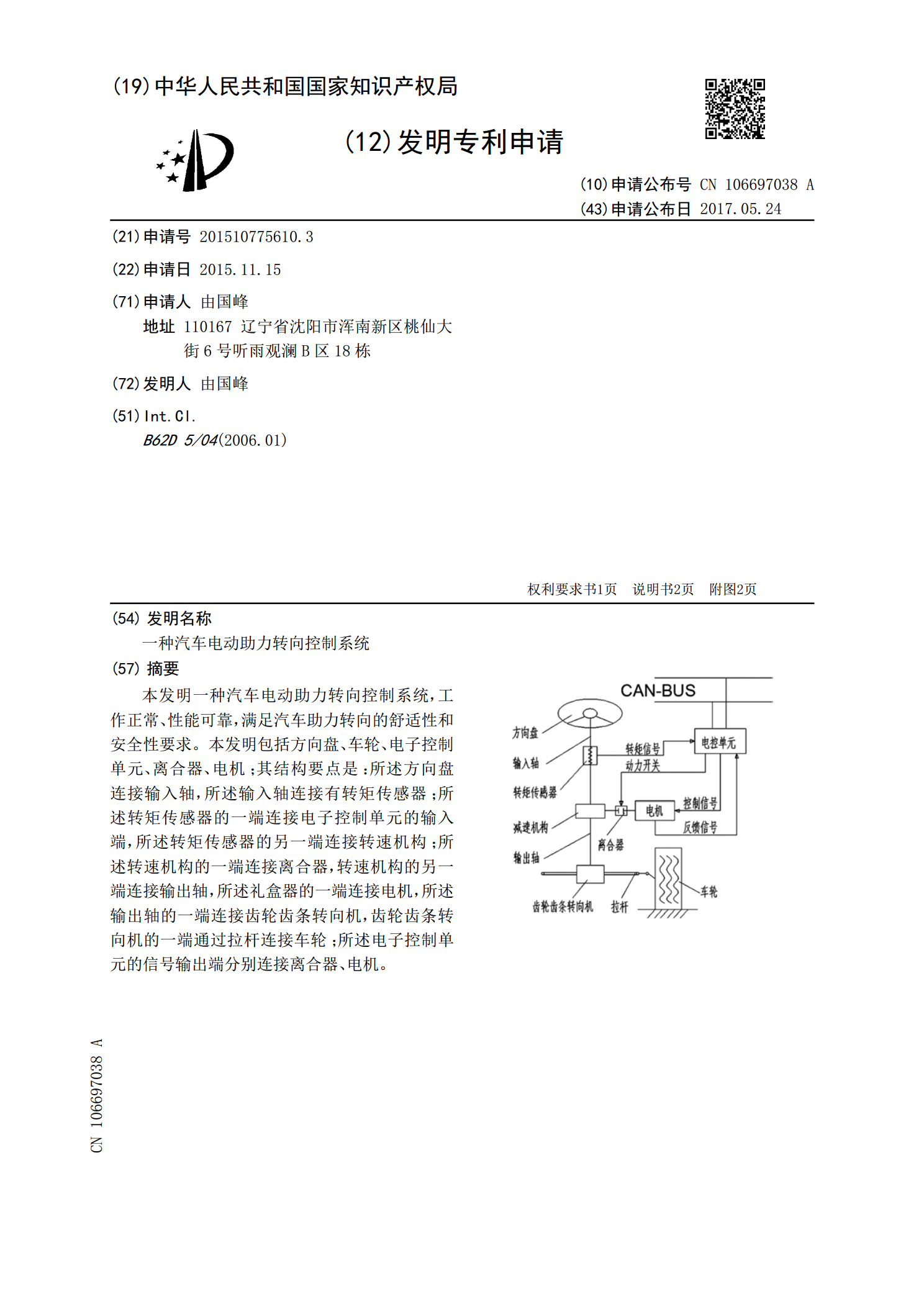
本发明一种汽车电动助力转向控制系统,工作正常、性能可靠,满足汽车助力转向的舒适性和安全性要求。本发明包括方向盘、车轮、电子控制单元、离合器、电机;其结构要点是:所述方向盘连接输入轴,所述输入轴连接有转矩传感器;所述转矩传感器的一端连接电子控制单元的输入端,所述转矩传感器的另一端连接转速机构;所述转速机构的一端连接离合器,转速机构的另一端连接输出轴,所述礼盒器的一端连接电机,所述输出轴的一端连接齿轮齿条转向机,齿轮齿条转向机的一端通过拉杆连接车轮;所述电子控制单元的信号输出端分别连接离合器、电机。