
汽车玻璃亚像素轮廓提取方法及汽车玻璃检测方法.pdf

子璇****君淑

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
汽车玻璃亚像素轮廓提取方法及汽车玻璃检测方法.pdf
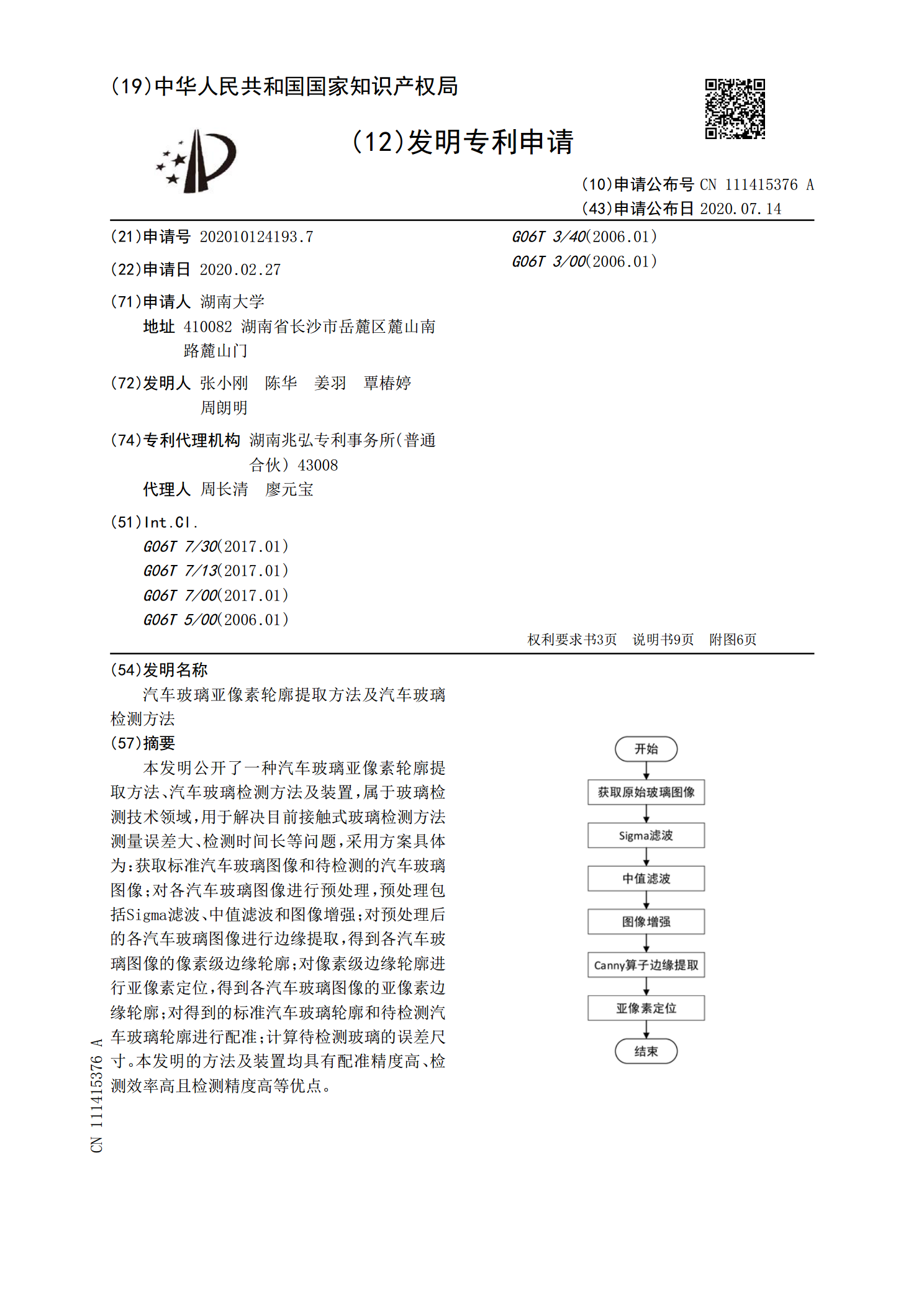
本发明公开了一种汽车玻璃亚像素轮廓提取方法、汽车玻璃检测方法及装置,属于玻璃检测技术领域,用于解决目前接触式玻璃检测方法测量误差大、检测时间长等问题,采用方案具体为:获取标准汽车玻璃图像和待检测的汽车玻璃图像;对各汽车玻璃图像进行预处理,预处理包括Sigma滤波、中值滤波和图像增强;对预处理后的各汽车玻璃图像进行边缘提取,得到各汽车玻璃图像的像素级边缘轮廓;对像素级边缘轮廓进行亚像素定位,得到各汽车玻璃图像的亚像素边缘轮廓;对得到的标准汽车玻璃轮廓和待检测汽车玻璃轮廓进行配准;计算待检测玻璃的误差尺寸。本
一种汽车玻璃的制造方法及汽车玻璃.pdf
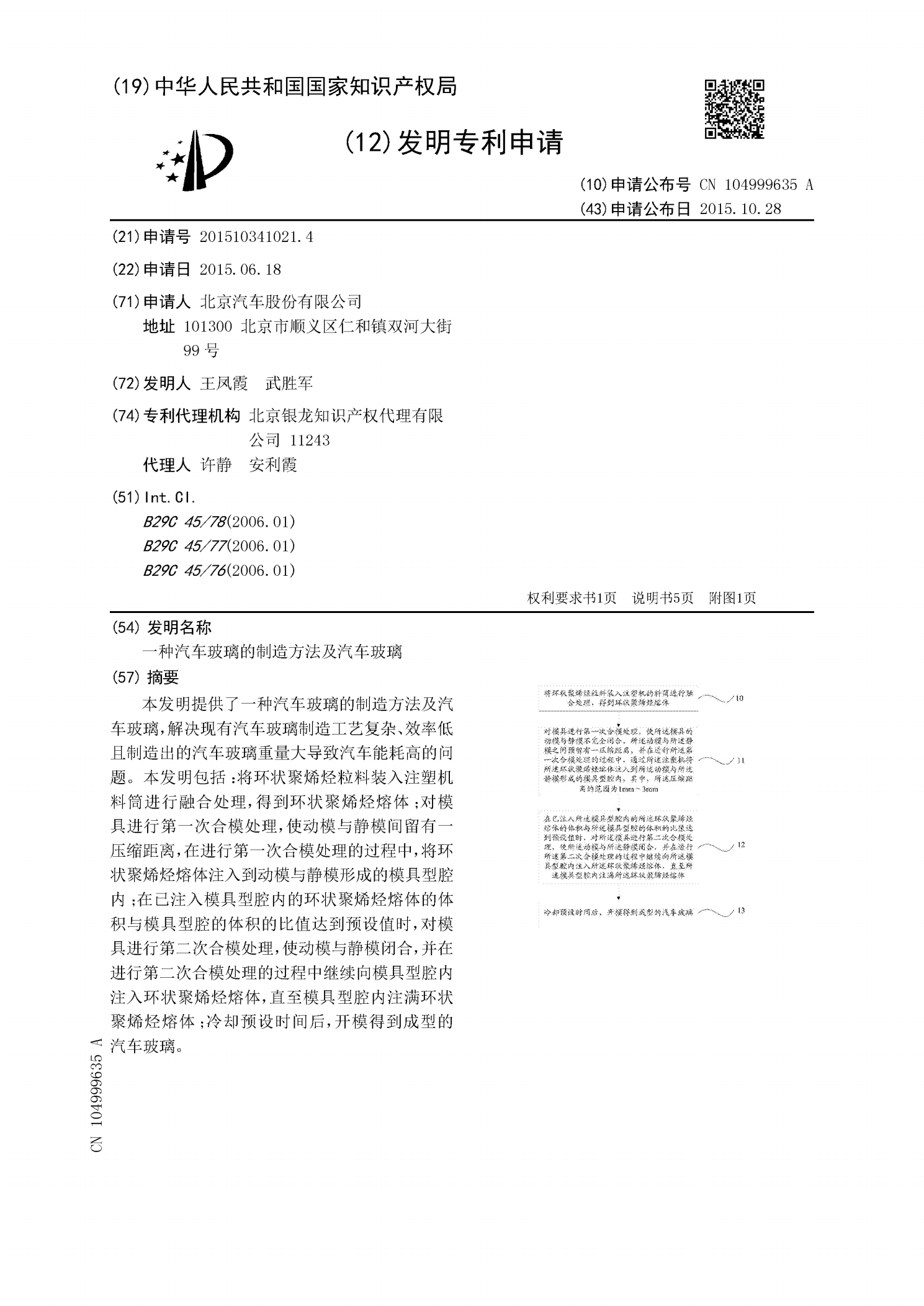
本发明提供了一种汽车玻璃的制造方法及汽车玻璃,解决现有汽车玻璃制造工艺复杂、效率低且制造出的汽车玻璃重量大导致汽车能耗高的问题。本发明包括:将环状聚烯烃粒料装入注塑机料筒进行融合处理,得到环状聚烯烃熔体;对模具进行第一次合模处理,使动模与静模间留有一压缩距离,在进行第一次合模处理的过程中,将环状聚烯烃熔体注入到动模与静模形成的模具型腔内;在已注入模具型腔内的环状聚烯烃熔体的体积与模具型腔的体积的比值达到预设值时,对模具进行第二次合模处理,使动模与静模闭合,并在进行第二次合模处理的过程中继续向模具型腔内注入

汽车玻璃保养方法.docx
汽车玻璃保养方法汽车玻璃保养方法汽车玻璃是汽车车身附件中必不可少的,主要起到防护作用。汽车玻璃主要有以下三类:夹层玻璃,钢化玻璃和区域钢化玻璃,能承受较强的冲击力。那么,汽车玻璃保养方法有哪些呢?下面和小编一起看看吧!汽车玻璃保养方法汽车玻璃按所在的位置分为:前挡风玻璃,侧窗玻璃,后挡风玻璃和天窗玻璃四种。其中前挡风玻璃国家强制规定必须是夹层玻璃——由两层或两层以上的玻璃用一层或数层透明的粘结材料粘合而成的玻璃制品。具有高抗冲击强度,粘结力高,耐光、耐热、耐湿、耐寒等特点。(夹层玻璃)侧窗和后窗一般为钢化

汽车玻璃保养方法.docx
汽车玻璃保养方法汽车玻璃保养方法玻璃就像汽车的眼睛,决定着汽车前进的安全性。下面整理了一些汽车玻璃保养方法,希望对大家有所帮助!1、合理使用玻璃水现在国内市场上出售的玻璃水种类繁多,但主要分为三种:夏季用玻璃水、冬季防冻型玻璃水和特效防冻型玻璃水。其中夏季用的玻璃水主要用于清除镜面上的飞虫残留物;冬季防冻型玻璃水主要是保证气温低于零下20℃时,汽车各零部件不会被冻坏;特殊防冻型玻璃水则主要用于北方特别寒冷的地区,能确保汽车在零下40℃时依旧不结冰。在平时的玻璃保养过程当中,我们要根据季节以及天气的具体情况

汽车玻璃的修补方法.docx
汽车玻璃的修补方法汽车玻璃的修补方法汽车玻璃的修补主要是在裂缝中填补液态胶质,消除缝隙。填补玻璃所用的材料是一种透明度很高的液态胶质,靠紫外线加热可迅速凝固,强度可达原玻璃的90%以上。下面是jy135小编收集整理的汽车玻璃的修补方法。欢迎阅读。汽车挡风玻璃修补,说起汽车玻璃的修补,也许有些人还根本不知道有这么回事,但在重视环保的现代化国家里,它算是很普遍的行业。很多人都有在高速行车时,挡风玻璃被石子或其他硬物弹裂的经历。遇到这种情况,如果为了一个小裂痕就换掉整块玻璃,不仅浪费,而且实在是不值;如果置之不