
机器人关节构造和机器人.pdf

又珊****ck


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人关节构造和机器人.pdf
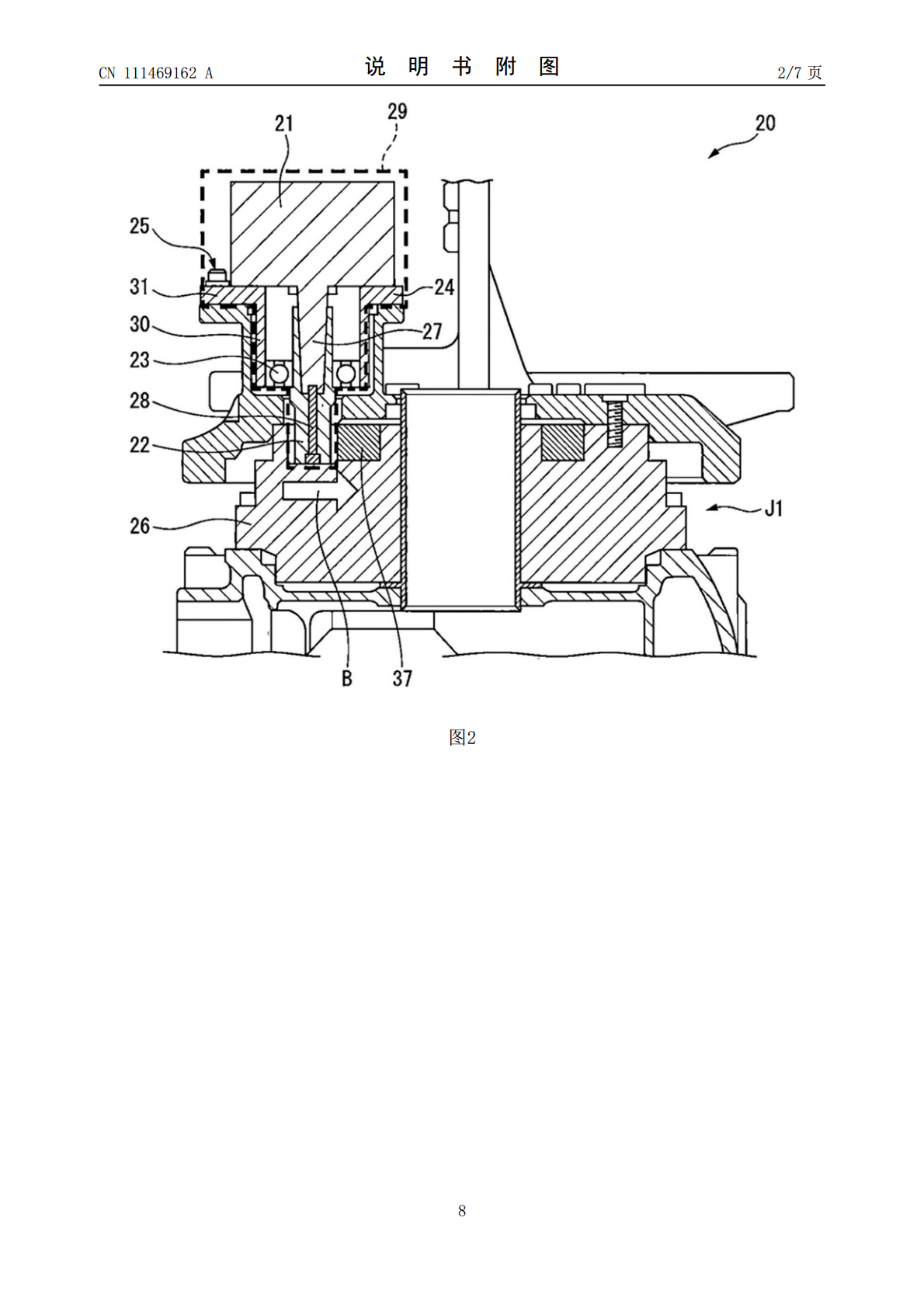
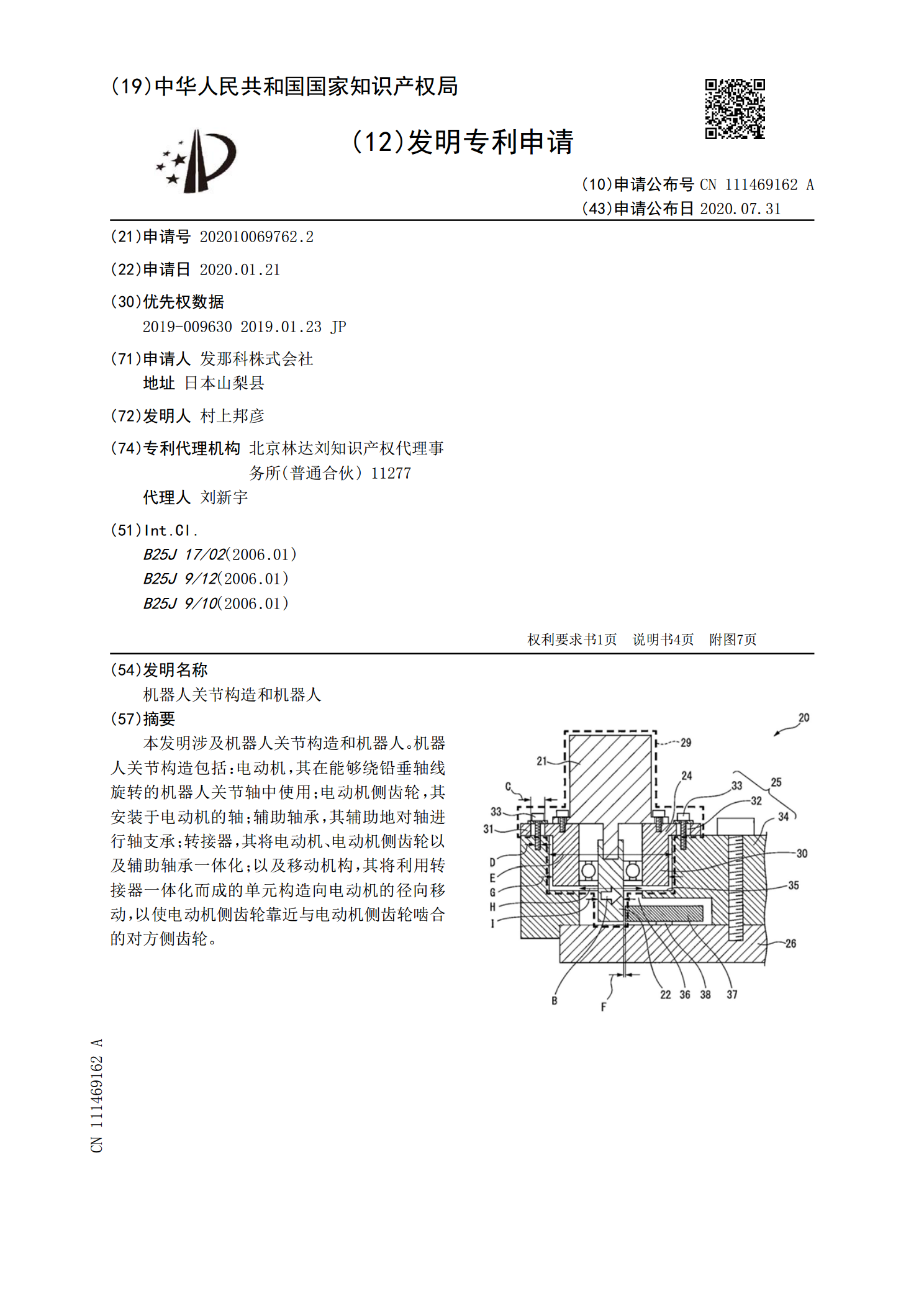
本发明涉及机器人关节构造和机器人。机器人关节构造包括:电动机,其在能够绕铅垂轴线旋转的机器人关节轴中使用;电动机侧齿轮,其安装于电动机的轴;辅助轴承,其辅助地对轴进行轴支承;转接器,其将电动机、电动机侧齿轮以及辅助轴承一体化;以及移动机构,其将利用转接器一体化而成的单元构造向电动机的径向移动,以使电动机侧齿轮靠近与电动机侧齿轮啮合的对方侧齿轮。

机器人关节构造.pdf
腕部(4)具有腕部壳体(42),该腕部壳体(42)具有:腕部驱动构造部(422),从腕部驱动用带轮(37)向腕部驱动构造部传递旋转;圆筒部(423),其被第1机械手驱动轴(44)贯穿,该第1机械手驱动轴(44)与腕部驱动构造部(422)的旋转轴同轴地设置,并且从机械手驱动用带轮(35)向第1机械手驱动轴传递旋转;线缆导入部(421),其与圆筒部(423)之间形成环状的间隙;以及机械手驱动轴贯穿部(424),其被第2机械手驱动轴(47)贯穿,该第2机械手驱动轴(47)被传递第1机械手驱动轴(44)的旋转而使
关节轴构造和水平多关节型机器人.pdf
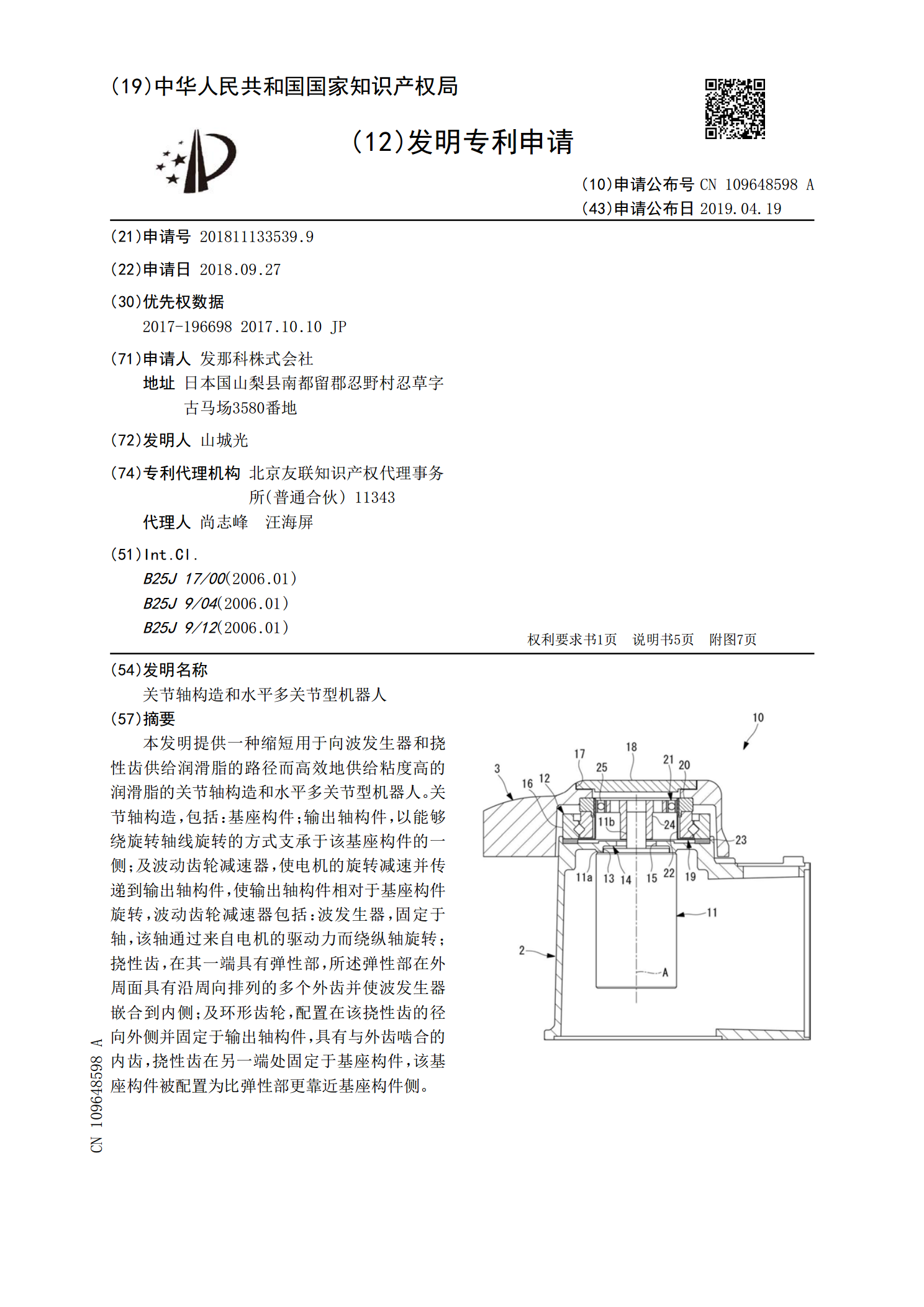
本发明提供一种缩短用于向波发生器和挠性齿供给润滑脂的路径而高效地供给粘度高的润滑脂的关节轴构造和水平多关节型机器人。关节轴构造,包括:基座构件;输出轴构件,以能够绕旋转轴线旋转的方式支承于该基座构件的一侧;及波动齿轮减速器,使电机的旋转减速并传递到输出轴构件,使输出轴构件相对于基座构件旋转,波动齿轮减速器包括:波发生器,固定于轴,该轴通过来自电机的驱动力而绕纵轴旋转;挠性齿,在其一端具有弹性部,所述弹性部在外周面具有沿周向排列的多个外齿并使波发生器嵌合到内侧;及环形齿轮,配置在该挠性齿的径向外侧并固定于输

机器人的关节构造.pdf
本发明公开一种机器人的关节构造,属于机器人技术领域,包括第一关节构件、第二关节构件、驱动装置、进油装置和密封装置,第一关节构件内形成有安装腔;驱动装置包括驱动电机和减速机,驱动电机的电机轴穿设于安装腔并与减速机驱动连接,且减速机的输出轴穿出于安装腔,以驱动第二关节构件相对于第一关节构件运动;密封装置包括两第一密封组件和两第二密封组件,两第一密封组件均安装于减速机,两第一密封组件以分别对减速机与电机轴之间及减速机与输出轴之间进行密封处理;两第二密封组件分别对所述安装腔和所述减速机之间进行密封处理。本发明技术

使多个构造部相对地旋转的驱动部的构造和具备关节部的机器人.pdf
提供一种抑制配置于关节部的内部的密封构件的劣化或破损的关节部的构造。关节部使第1构造部(9)和第2构造部(10)相对地旋转。关节部的构造具备:油封(35),其配置于间隙部(71);以及迷宫构件(41),其配置于第1构造部(9)和第2构造部(10)的外表面。迷宫构件(41)具有与间隙部(71)连通的通路(69)。迷宫构件(41)形成为能够向第1构造部(9)的外表面和第2构造部(10)的外表面安装。而且,迷宫构件(41)形成为能够自第1构造部(9)和第2构造部(10)拆下。