
风力发电机组、变桨控制方法以及装置.pdf

Ma****57

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

风力发电机组、变桨控制方法以及装置.pdf
本公开提供了一种风力发电机组、变桨控制方法以及装置。所述变桨控制方法包括:获取风力发电机组的叶轮转速和每个叶片的叶片根部在特定方向上的载荷,其中,所述特定方向垂直于叶轮的轴向和叶片的长度方向;基于获取的叶轮转速来预估叶轮方位角;基于预估的叶轮方位角和所述每个叶片的叶片根部在所述特定方向上的载荷来分别计算所述每个叶片的附加桨矩角度;根据计算的所述每个叶片的附加桨矩角度来执行独立变桨控制。根据风力发电机组、变桨控制方法以及装置可以省去传统的方位角传感器,基于叶轮转速计算得到相位补偿值,从而进行独立变桨控制,不
变桨装置以及具有该变桨装置的风力发电机组.pdf
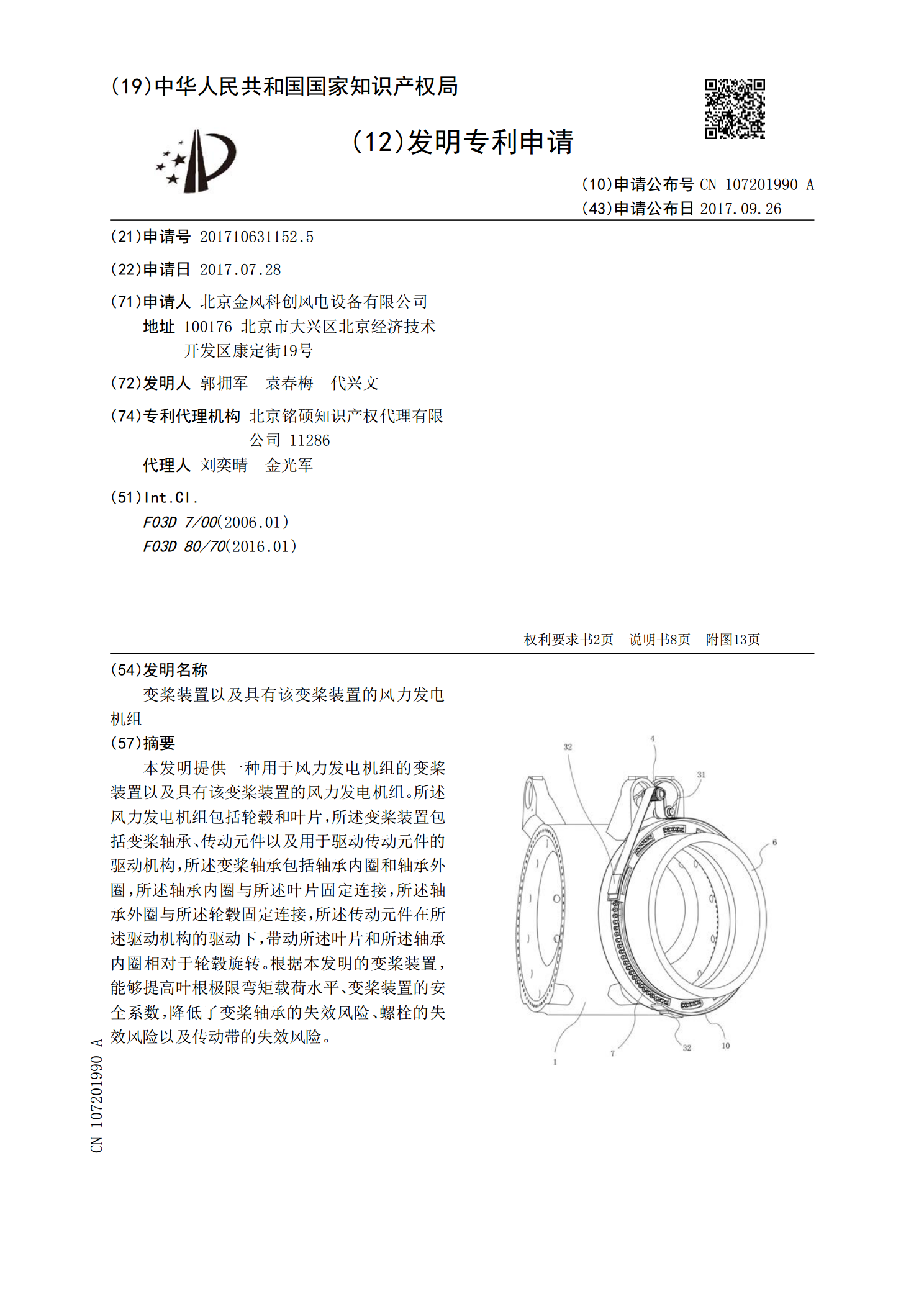
本发明提供一种用于风力发电机组的变桨装置以及具有该变桨装置的风力发电机组。所述风力发电机组包括轮毂和叶片,所述变桨装置包括变桨轴承、传动元件以及用于驱动传动元件的驱动机构,所述变桨轴承包括轴承内圈和轴承外圈,所述轴承内圈与所述叶片固定连接,所述轴承外圈与所述轮毂固定连接,所述传动元件在所述驱动机构的驱动下,带动所述叶片和所述轴承内圈相对于轮毂旋转。根据本发明的变桨装置,能够提高叶根极限弯矩载荷水平、变桨装置的安全系数,降低了变桨轴承的失效风险、螺栓的失效风险以及传动带的失效风险。
变桨装置以及具有该变桨装置的风力发电机组.pdf
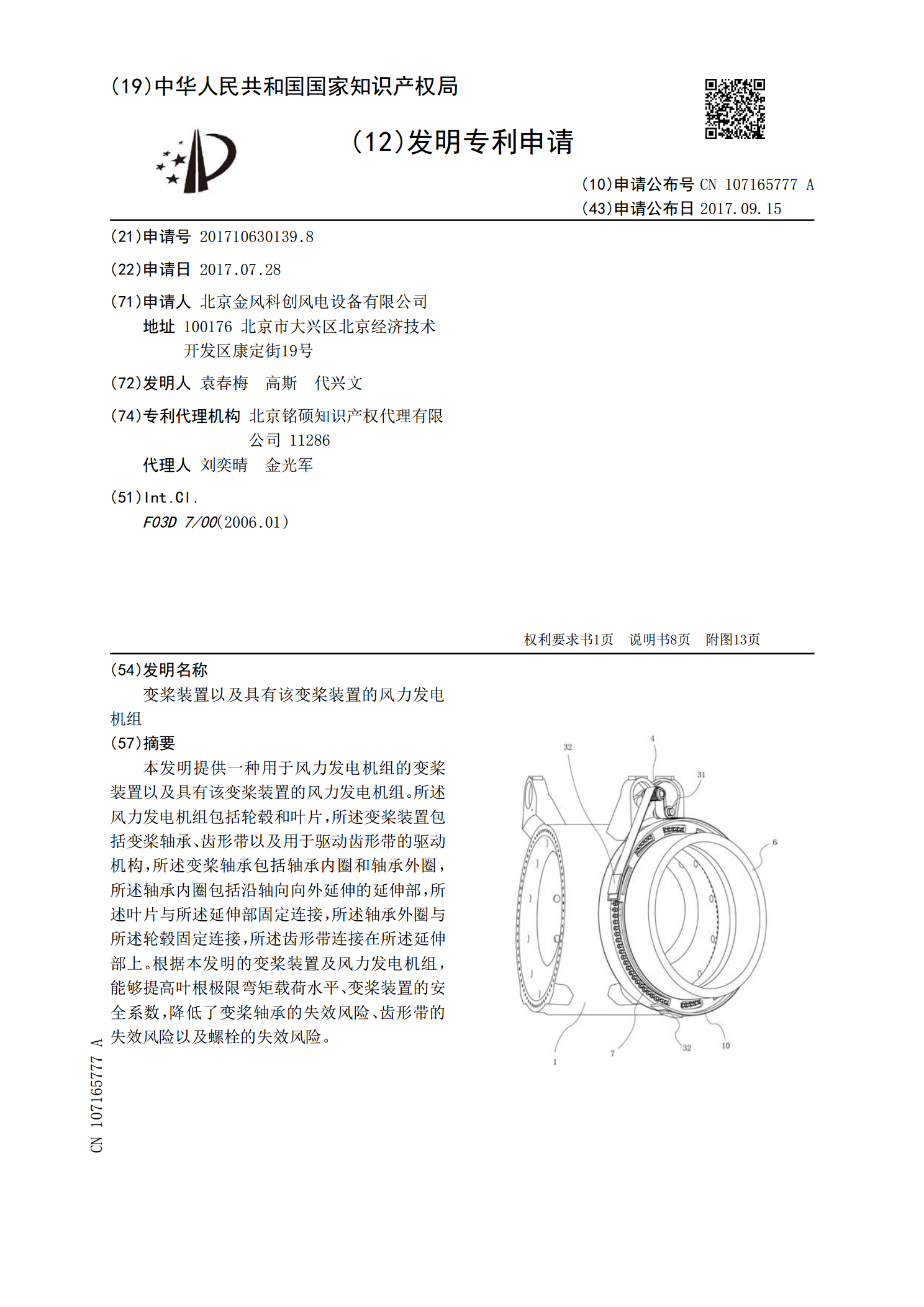
本发明提供一种用于风力发电机组的变桨装置以及具有该变桨装置的风力发电机组。所述风力发电机组包括轮毂和叶片,所述变桨装置包括变桨轴承、齿形带以及用于驱动齿形带的驱动机构,所述变桨轴承包括轴承内圈和轴承外圈,所述轴承内圈包括沿轴向向外延伸的延伸部,所述叶片与所述延伸部固定连接,所述轴承外圈与所述轮毂固定连接,所述齿形带连接在所述延伸部上。根据本发明的变桨装置及风力发电机组,能够提高叶根极限弯矩载荷水平、变桨装置的安全系数,降低了变桨轴承的失效风险、齿形带的失效风险以及螺栓的失效风险。
风力发电机组叶片变桨装置、变桨方法及风力发电机组.pdf
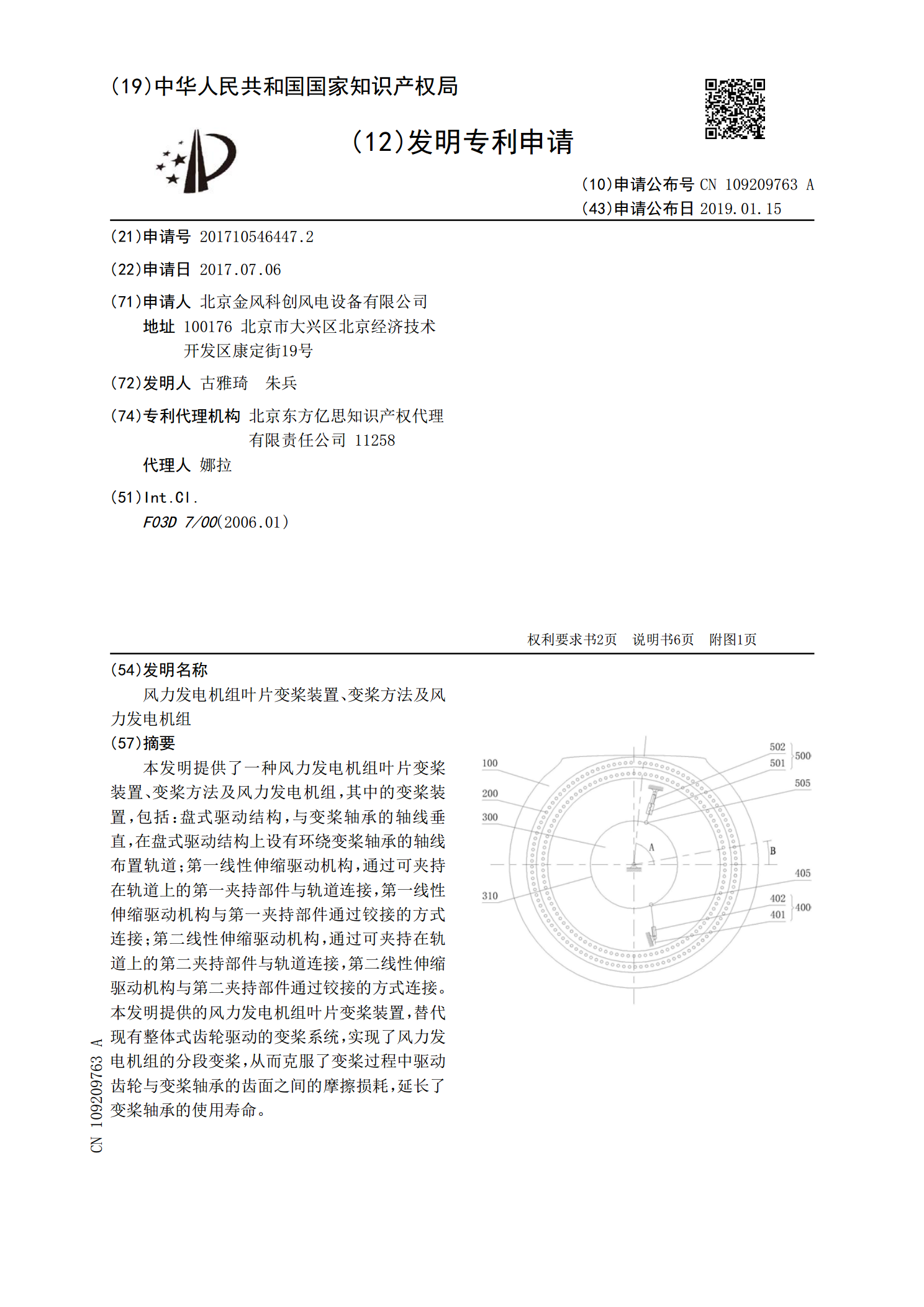
本发明提供了一种风力发电机组叶片变桨装置、变桨方法及风力发电机组,其中的变桨装置,包括:盘式驱动结构,与变桨轴承的轴线垂直,在盘式驱动结构上设有环绕变桨轴承的轴线布置轨道;第一线性伸缩驱动机构,通过可夹持在轨道上的第一夹持部件与轨道连接,第一线性伸缩驱动机构与第一夹持部件通过铰接的方式连接;第二线性伸缩驱动机构,通过可夹持在轨道上的第二夹持部件与轨道连接,第二线性伸缩驱动机构与第二夹持部件通过铰接的方式连接。本发明提供的风力发电机组叶片变桨装置,替代现有整体式齿轮驱动的变桨系统,实现了风力发电机组的分段变

变速变桨风力发电机组独立变桨控制方法.pdf
一种变速变桨风力发电机组独立变桨控制方法,包括协同变桨控制过程:检测发电机输出的功率Pg,与参考功率Ptate相减得出功率偏差ΔP,经PI控制器,得出协同变桨控制期望输出的协同节距角βc;还包括偏差变桨控制过程:1)检测三桨叶片根部的y方向载荷(My1,My2,My3)、z方向载荷(Mz1,Mz2,Mz3)和叶轮方位角θ,将y方向载荷、z方向载荷分别经Park变换为载荷分量(Md,Mq,Mtilt,Myaw);2)再经PI控制器输出节距角3)节距角经变桨速率限制,输出节距角(βd,βq);4)节距角(βd