
一种用于船舶清洗的摆臂式磁力爬壁机器人.pdf

小新****ou

1/10
2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于船舶清洗的摆臂式磁力爬壁机器人.pdf
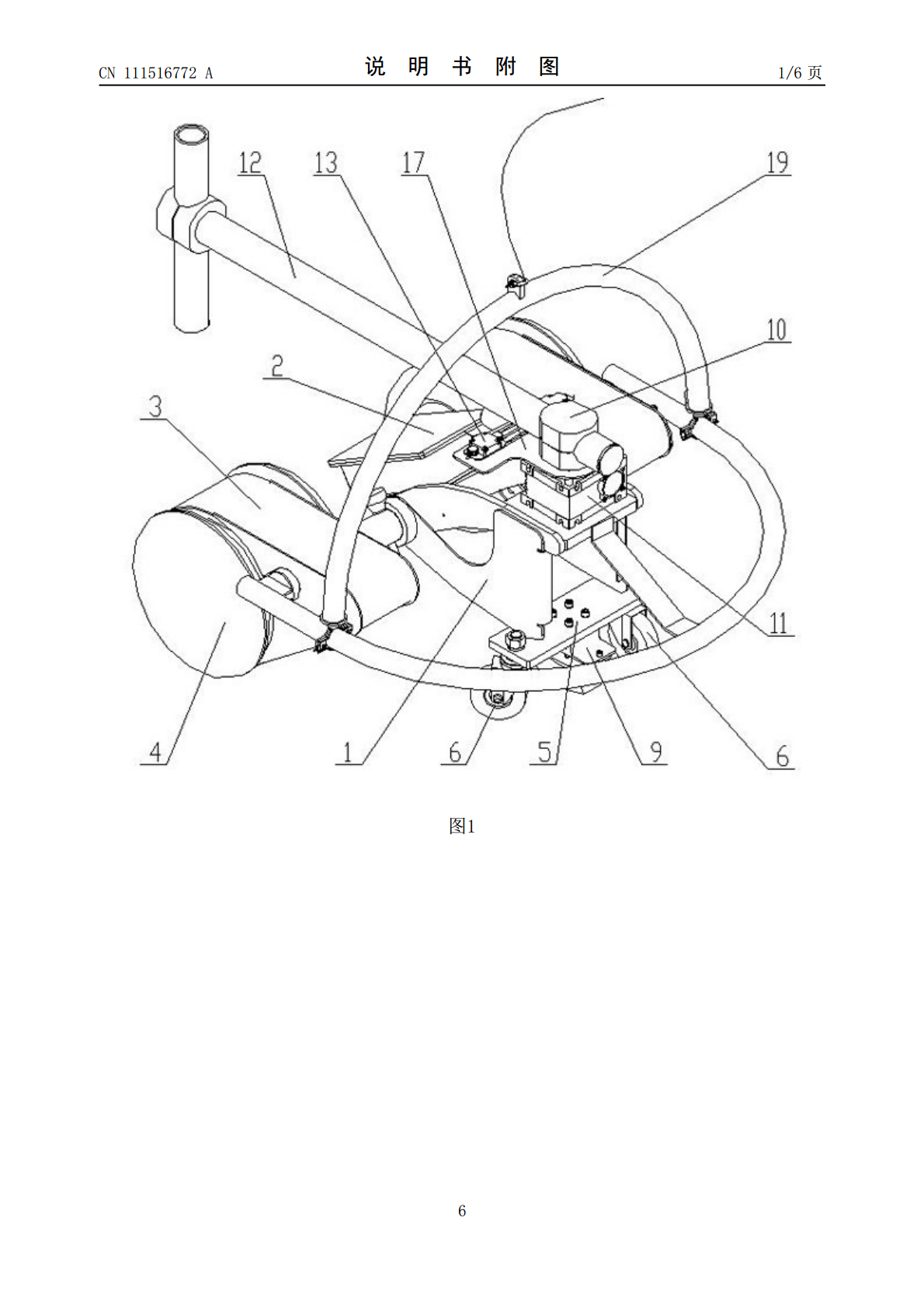
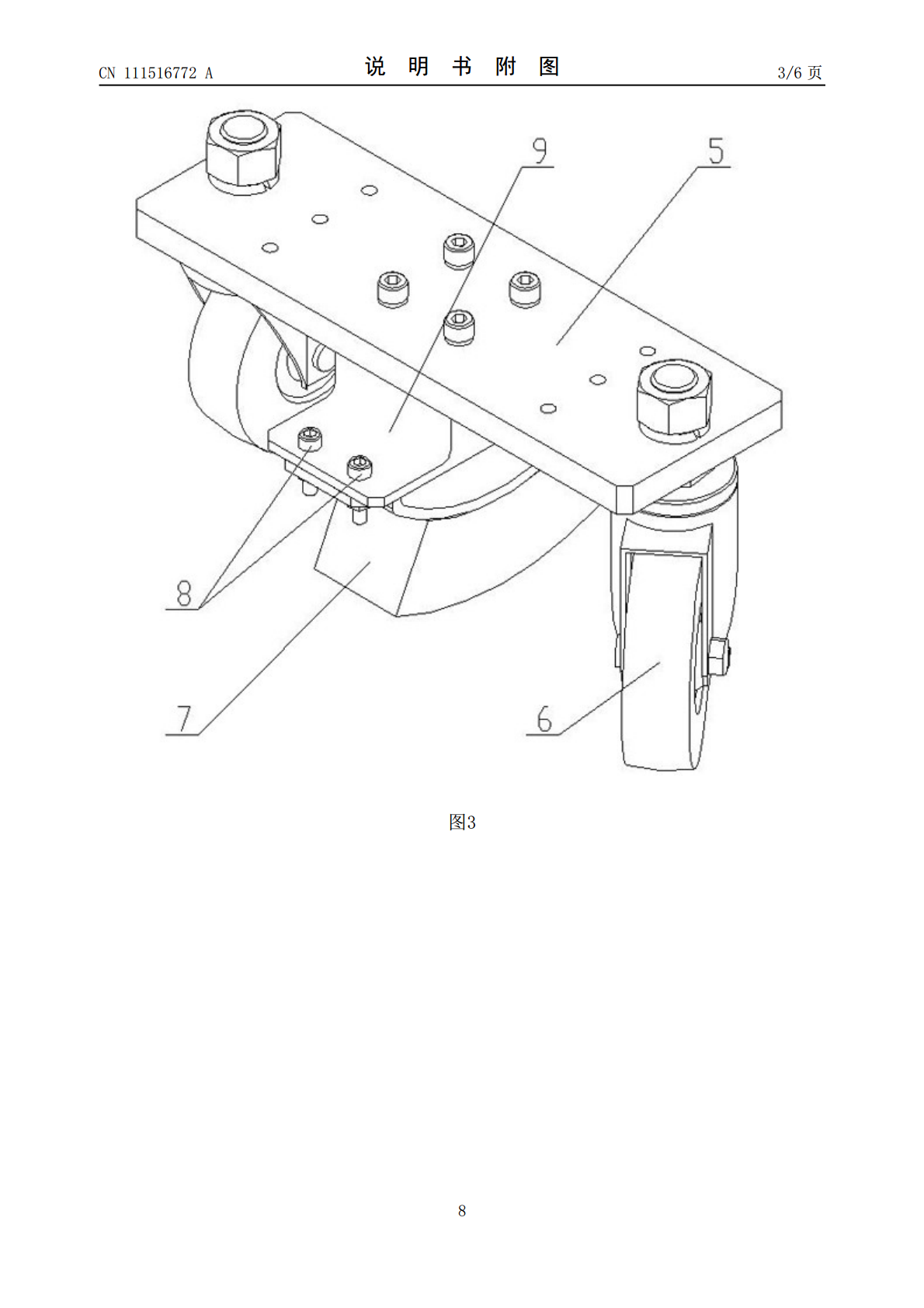
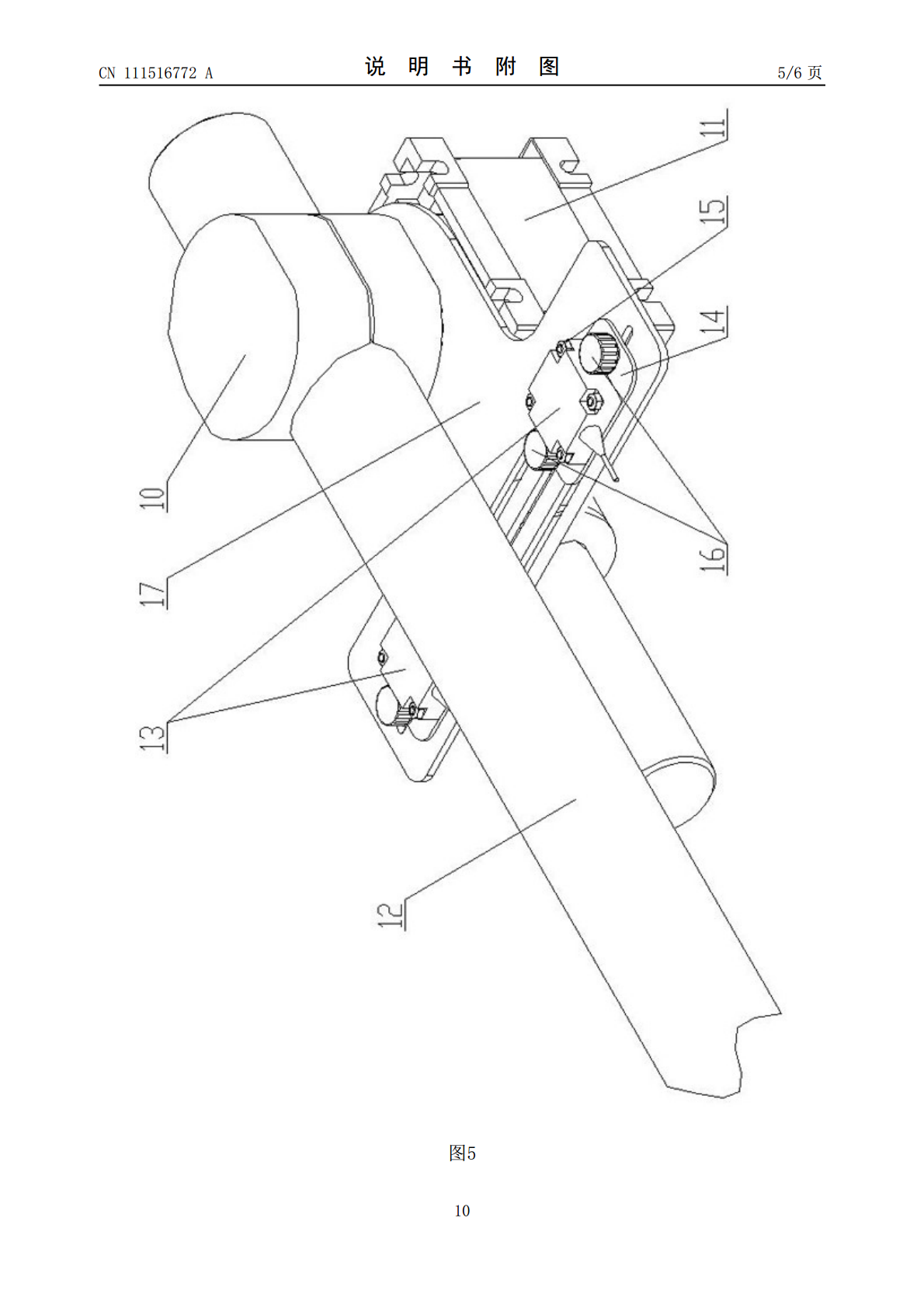
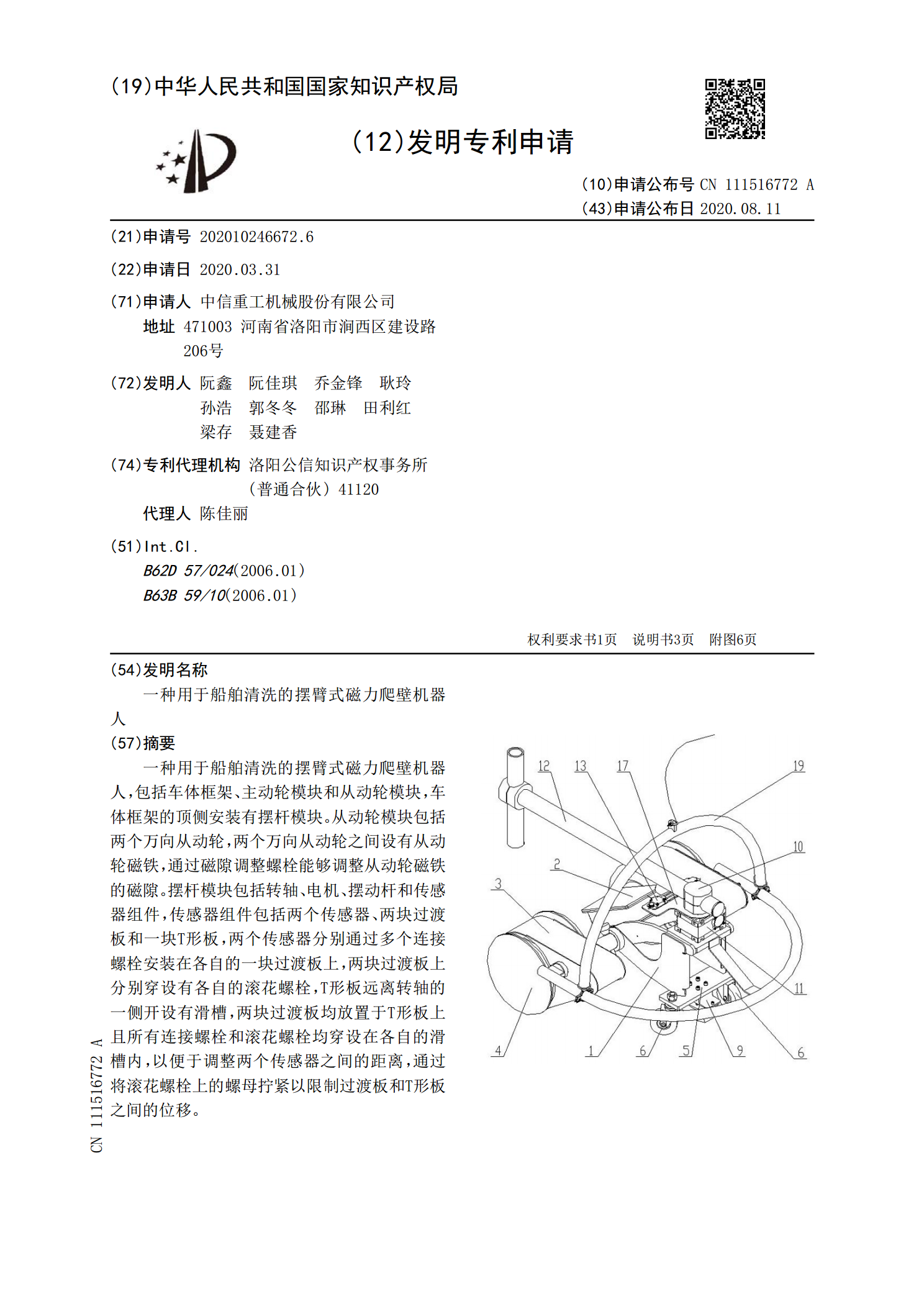
一种用于船舶清洗的摆臂式磁力爬壁机器人,包括车体框架、主动轮模块和从动轮模块,车体框架的顶侧安装有摆杆模块。从动轮模块包括两个万向从动轮,两个万向从动轮之间设有从动轮磁铁,通过磁隙调整螺栓能够调整从动轮磁铁的磁隙。摆杆模块包括转轴、电机、摆动杆和传感器组件,传感器组件包括两个传感器、两块过渡板和一块T形板,两个传感器分别通过多个连接螺栓安装在各自的一块过渡板上,两块过渡板上分别穿设有各自的滚花螺栓,T形板远离转轴的一侧开设有滑槽,两块过渡板均放置于T形板上且所有连接螺栓和滚花螺栓均穿设在各自的滑槽内,以便

一种用于船舶清洗的磁力爬壁装备.pdf
一种用于船舶清洗的磁力爬壁装备,包括摆臂式磁力爬壁机器人、吸盘式磁力爬壁机器人和机器人辅助转运车架,通过对摆臂式磁力爬壁机器人和吸盘式磁力爬壁机器人的从动轮模块进行改进,使从动轮模块具有互换性并且使用方便。通过对摆臂式磁力爬壁机器人的传感器安装方式进行改进,使传感器位置的调整更为便捷。通过对机器人辅助转运车架的结构进行改进,使辅助转运车架对设备的安全保护和转运都更为可靠,解决了现有的磁力爬壁装备存在的多种问题,满足生产需要。

一种爬壁式船舶焊缝检测机器人.pdf
本发明公开了一种爬壁式船舶焊缝检测机器人,具体涉及检测机器人领域,包括爬壁式机器人,爬壁式机器人的顶部一侧固定安装有焊缝检测机器人,爬壁式机器人的顶部远离焊缝检测机器人的一侧固定安装有控制总成系统,爬壁式机器人靠近控制总成系统的一侧固定安装有除屑机构,爬壁式机器人的四周均固定安装有滚轮式强磁吸附机构。本发明通过设置了贴合型刮板机构,利用滚轮式强磁吸附块与环形滚轮式连接块的旋转,使得滚筒式清洁贴合块与清洁型外置套块同时进行旋转,达到双重清洁滚轮式强磁吸附块与环形滚轮式连接块的作用,相对提升了滚轮式强磁吸附机

一种爬臂式船舶外体清洗装置.pdf
本发明公开了一种爬臂式船舶外体清洗装置,包括支架,支架上固定安装由滑轮,滑轮滑动在导轨上,支架上贯穿设有滑杆,滑杆上一侧固定设有安装座,安装座上设有凹槽,凹槽设有出水管、清洁剂管和电机,电机传动连接转盘,转盘转动安装在安装座上,转盘上固定设有刷子和刀片,滑杆上另一侧固定设有轮齿,轮齿一侧设有扇形板,扇形板固定安装在传动杆上,传动杆贯穿第一通孔铰接在支架上,同时启动电机,驱动转盘,使转盘上的刀片转动,附有清洁剂的刀片将船外体上污垢刮落,且转盘上的刷子转动,附有水的刷子对船外体进行清洗,使清洗效果更好,省时省
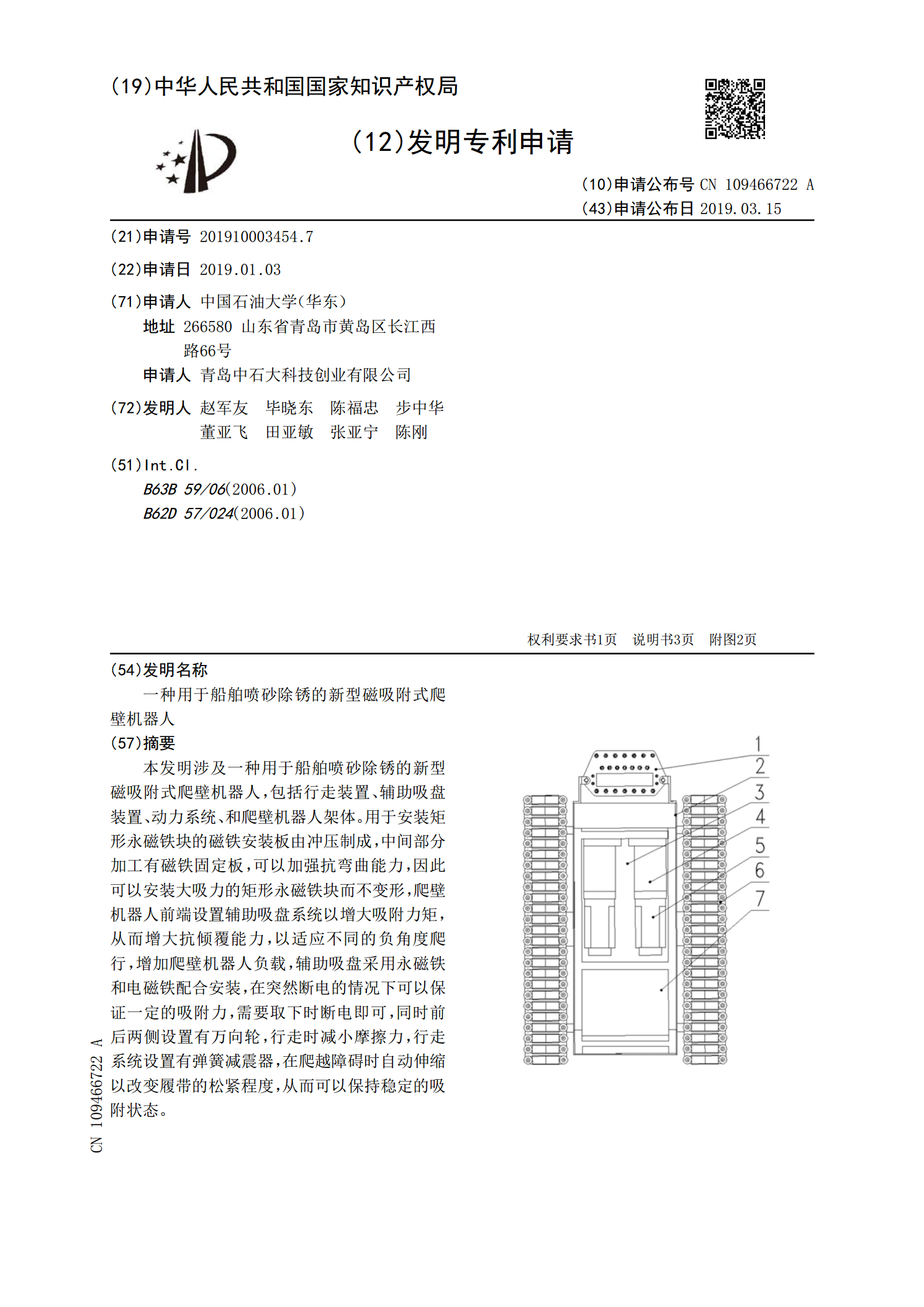
一种用于船舶喷砂除锈的新型磁吸附式爬壁机器人.pdf
本发明涉及一种用于船舶喷砂除锈的新型磁吸附式爬壁机器人,包括行走装置、辅助吸盘装置、动力系统、和爬壁机器人架体。用于安装矩形永磁铁块的磁铁安装板由冲压制成,中间部分加工有磁铁固定板,可以加强抗弯曲能力,因此可以安装大吸力的矩形永磁铁块而不变形,爬壁机器人前端设置辅助吸盘系统以增大吸附力矩,从而增大抗倾覆能力,以适应不同的负角度爬行,增加爬壁机器人负载,辅助吸盘采用永磁铁和电磁铁配合安装,在突然断电的情况下可以保证一定的吸附力,需要取下时断电即可,同时前后两侧设置有万向轮,行走时减小摩擦力,行走系统设置有弹