
用于车辆转向控制的系统和方法.pdf

雨巷****彦峰

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共40页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于车辆转向控制的系统和方法.pdf
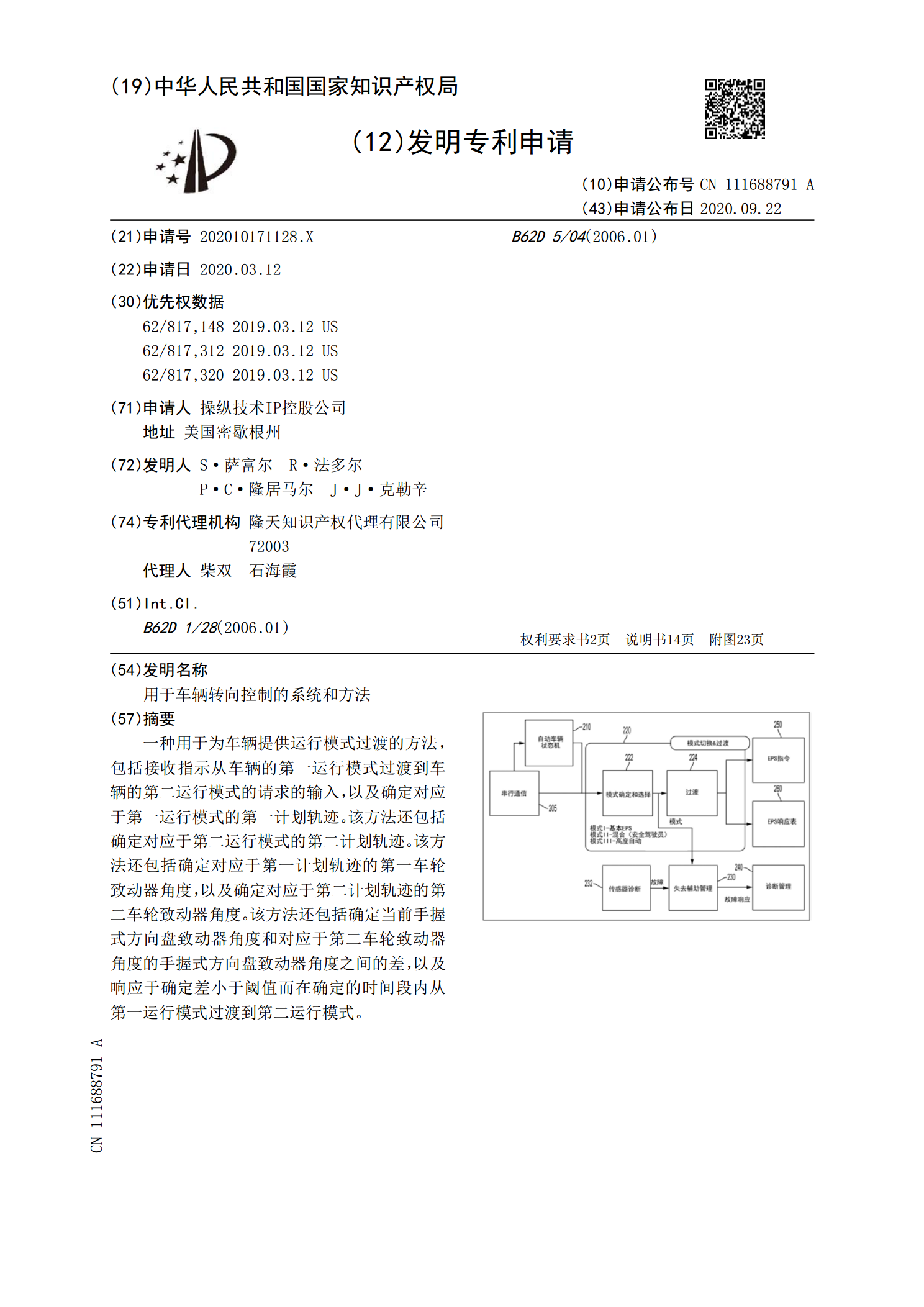
一种用于为车辆提供运行模式过渡的方法,包括接收指示从车辆的第一运行模式过渡到车辆的第二运行模式的请求的输入,以及确定对应于第一运行模式的第一计划轨迹。该方法还包括确定对应于第二运行模式的第二计划轨迹。该方法还包括确定对应于第一计划轨迹的第一车轮致动器角度,以及确定对应于第二计划轨迹的第二车轮致动器角度。该方法还包括确定当前手握式方向盘致动器角度和对应于第二车轮致动器角度的手握式方向盘致动器角度之间的差,以及响应于确定差小于阈值而在确定的时间段内从第一运行模式过渡到第二运行模式。

用于使车辆转向的转向系统和方法.pdf
一种在驾驶车辆时响应于一个事件而脱开车辆的车轮组件的转向系统。该转向系统包括悬架节、转向横拉杆和拉出器。该拉出器包括连接器,该连接器将悬架节与转向横拉杆可拆卸地接合以使该悬架节与该转向横拉杆互连。该拉出器能够响应于该事件而移动连接器以使该连接器从悬架节和转向横拉杆中的至少一个脱开。当驾驶车辆时车辆沿纵向轴线运行并且感测到绕纵向轴线的车辆力矩。如果该力矩超过一定阈值,则拉出器被激励以使悬架节从转向横拉杆脱开。
用于控制车辆的转向系统的方法和系统.pdf
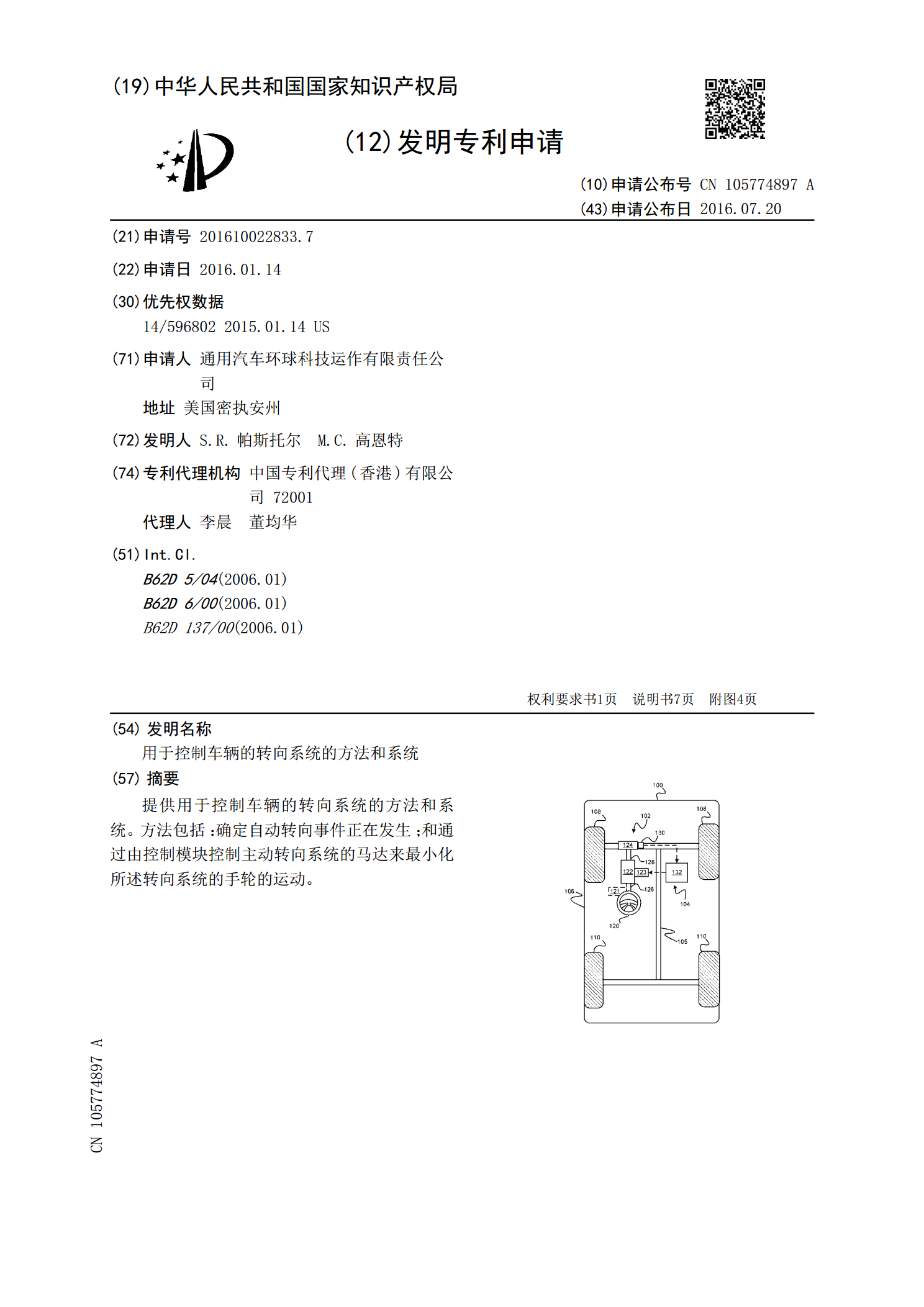
提供用于控制车辆的转向系统的方法和系统。方法包括:确定自动转向事件正在发生;和通过由控制模块控制主动转向系统的马达来最小化所述转向系统的手轮的运动。

用于运行转向系统的方法、转向系统和车辆.pdf
本发明涉及一种用于运行车辆(100)转向系统(1)的方法(200),其中,所述转向系统(1)具有方向盘(11)、转向轮(2)、用于调节方向盘(11)的转动位置的方向盘调节驱动器(14)、用于使转向轮(2)转向的车轮转向驱动器(4)和用于控制车轮转向驱动器(4)和方向盘调节驱动器(14)的控制器(6),其中转向轮(2)与方向盘(11)在机械方面脱耦。根据本发明,在点火装置关闭的情况下自动地由方向盘调节驱动器(14)将方向盘(11)调整到一独立于转向轮(2)的车轮转角(RLW)的中性位置(NW)中。本发明还涉
用于控制车辆的转向的方法和系统.pdf
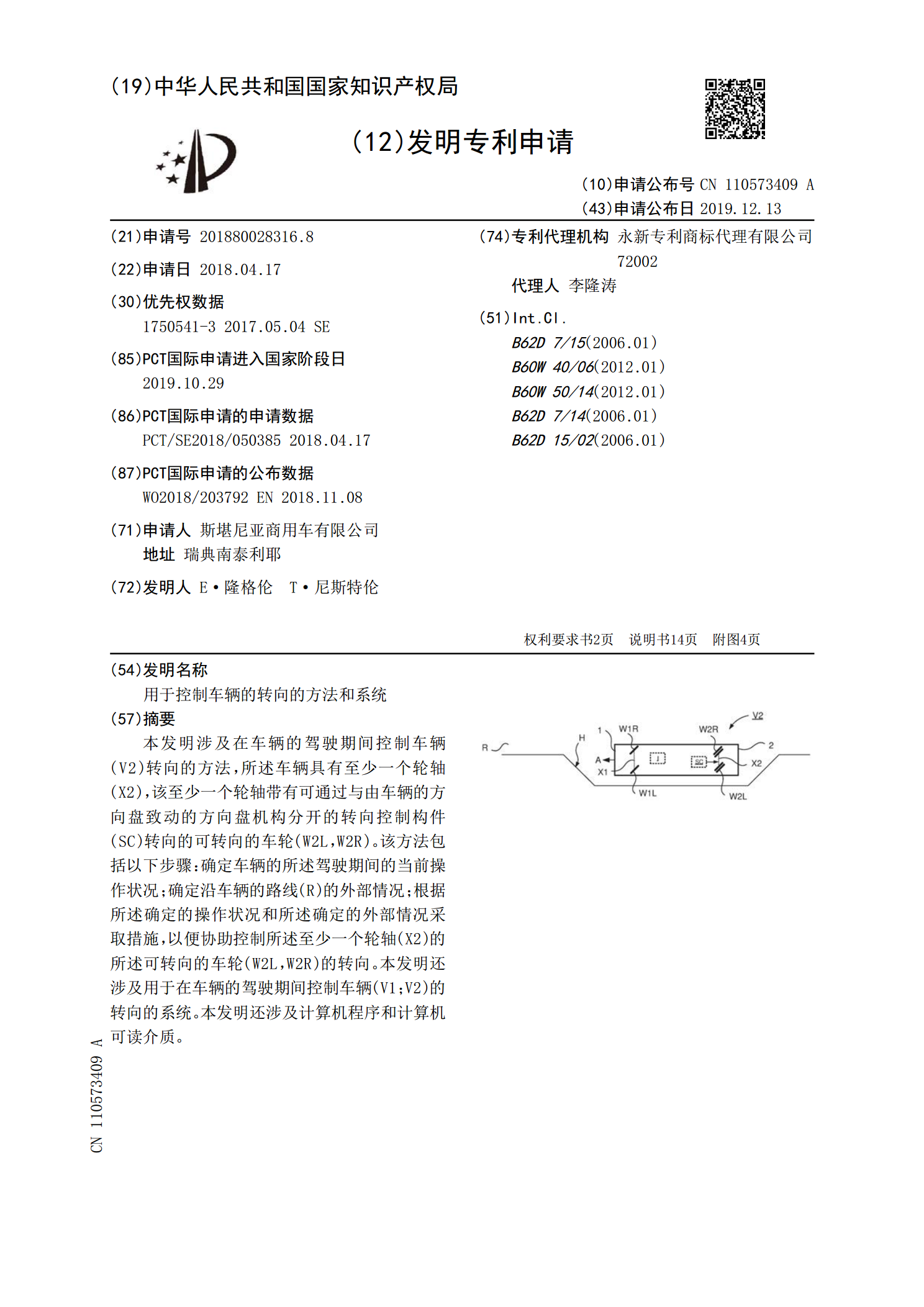
本发明涉及在车辆的驾驶期间控制车辆(V2)转向的方法,所述车辆具有至少一个轮轴(X2),该至少一个轮轴带有可通过与由车辆的方向盘致动的方向盘机构分开的转向控制构件(SC)转向的可转向的车轮(W2L,W2R)。该方法包括以下步骤:确定车辆的所述驾驶期间的当前操作状况;确定沿车辆的路线(R)的外部情况;根据所述确定的操作状况和所述确定的外部情况采取措施,以便协助控制所述至少一个轮轴(X2)的所述可转向的车轮(W2L,W2R)的转向。本发明还涉及用于在车辆的驾驶期间控制车辆(V1;V2)的转向的系统。本发明还涉