
一种用于管道检测的SLAM系统及方法.pdf

傲丝****账号


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于管道检测的SLAM系统及方法.pdf
本发明公开一种用于管道检测的SLAM系统,包括管道机器人、控制器,管道机器人在管道内运动,还包括前视激光雷达、管径测量装置和里程轮,前视激光雷达、管径测量装置和里程轮分别与控制器连接;前视激光雷达,用于检测管道内前方未知管段的信息,并将检测信息传输给控制器建立基本模型;管径测量装置,用于测量管道机器人当前位置的管径信息,并将测量的管径信息传输给控制器,控制器对基本模型优化调整形成信任模型;里程轮,用于测量管道机器人沿管道中轴线行进的路程信息,并将测量的路程信息传输给控制器,控制器结合路程信息和信任模型,计

一种用于管道内部检测的电磁检测系统及方法.pdf
一种用于管道内部检测的电磁检测系统及方法,包括能源动力节、电池节、中控节、电磁扰流检测节、行进轮、空心铰链和防撞头;能源动力节、中控节和多组电磁扰流检测节之间通过空心铰链连接;能源动力节内部设置涡轮发电机;能源动力节能源动力节的前进端设置防撞头;电池节包括可充电电池组及电源适配装置;电池节封装设置在空心铰链内部;本发明中,设备在管道中运动,从而对管道进行检测;电磁扰流检测节与管道内壁保持紧密贴合,且上、下活动范围大,能够更好地适应管道实际工况;电磁扰流检测节采用叠层线圈垂直激励磁场方向布置,可有效降低激励

一种用于管道磁浮交通的检测系统及方法.pdf
本发明公开了一种用于管道磁浮交通的检测系统及方法,属于真空管道磁浮领域,其通过桥墩检测模组和管道检测模组对真空管道磁浮列车在穿过桥墩和管道前、穿过时和穿过后,桥墩的振动、形变和沉降,以及管道本体的振动、应力以及形变和温度等多项数据进行监测,并将检测到的数据传输到数据处理中心进行实验分析。本发明的用于管道磁浮交通的检测系统,通过多样的检测方式,实现对管道和桥墩多维度的数据采集,同时采集列车在穿过前、穿过时以及穿过后的数据,形成不同的数据模组,方便实验人员针对列车对管道以及桥梁造成的影响进行分析,具有良好的实
一种用于海底管道的内检测系统及其检测方法.pdf
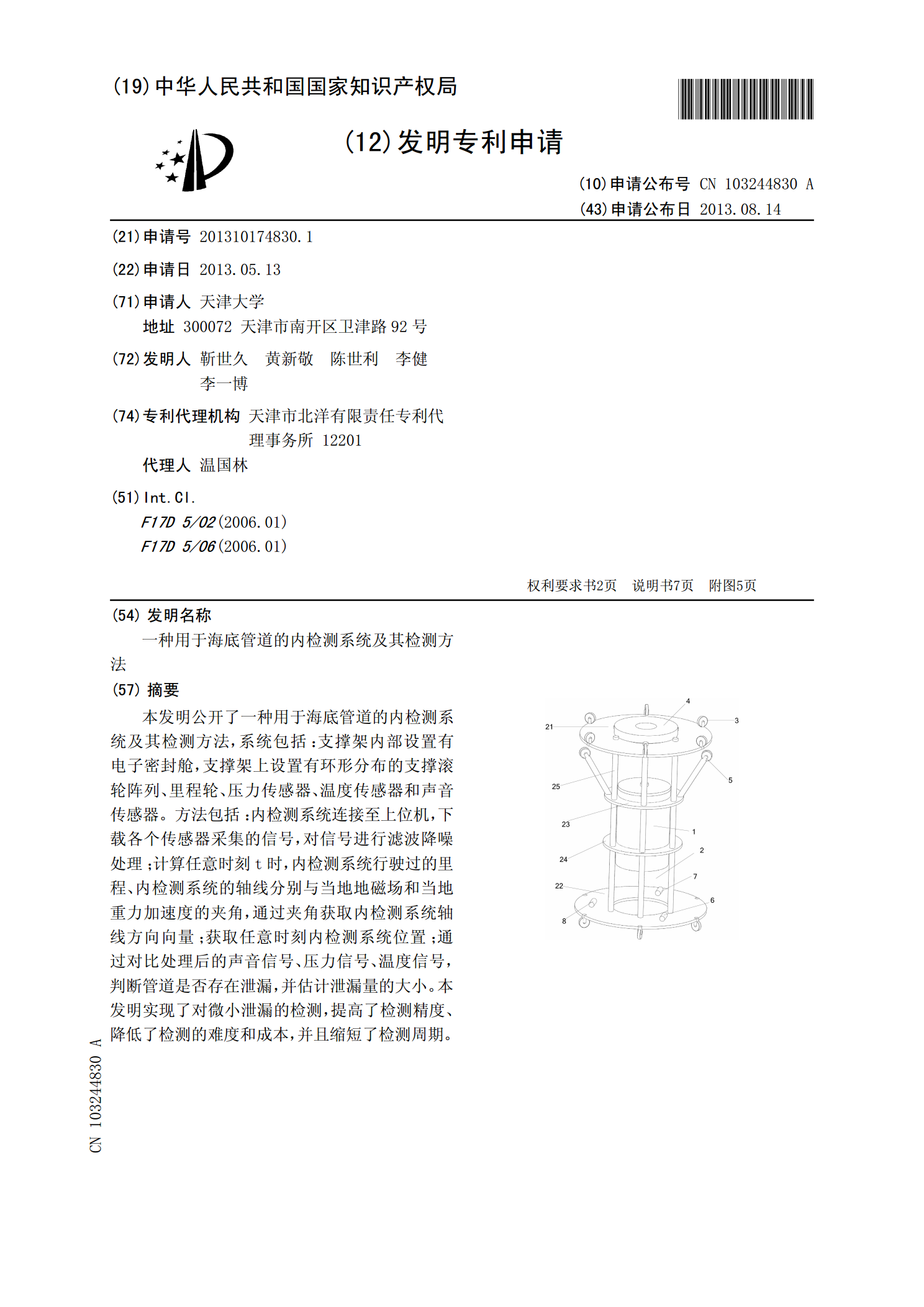
本发明公开了一种用于海底管道的内检测系统及其检测方法,系统包括:支撑架内部设置有电子密封舱,支撑架上设置有环形分布的支撑滚轮阵列、里程轮、压力传感器、温度传感器和声音传感器。方法包括:内检测系统连接至上位机,下载各个传感器采集的信号,对信号进行滤波降噪处理;计算任意时刻t时,内检测系统行驶过的里程、内检测系统的轴线分别与当地地磁场和当地重力加速度的夹角,通过夹角获取内检测系统轴线方向向量;获取任意时刻内检测系统位置;通过对比处理后的声音信号、压力信号、温度信号,判断管道是否存在泄漏,并估计泄漏量的大小。本

用于检测管道系统失效的方法和系统.pdf
提供一种用于燃气涡轮发动机的管故障检测系统,燃气涡轮发动机具有压缩机和涡轮。管故障检测系统包括冷却歧管,它构造成将冷却空气从压缩机引导到涡轮。冷却歧管包括至少两个冷却管、构造成检测表明管破裂的运行状况的传感器,以及控制器,控制器构造成响应于传感器检测到的运行状况来控制通过冷却歧管的冷却空气的量。