
一种减速带识别方法及系统.pdf

美丽****ka

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种减速带识别方法及系统.pdf
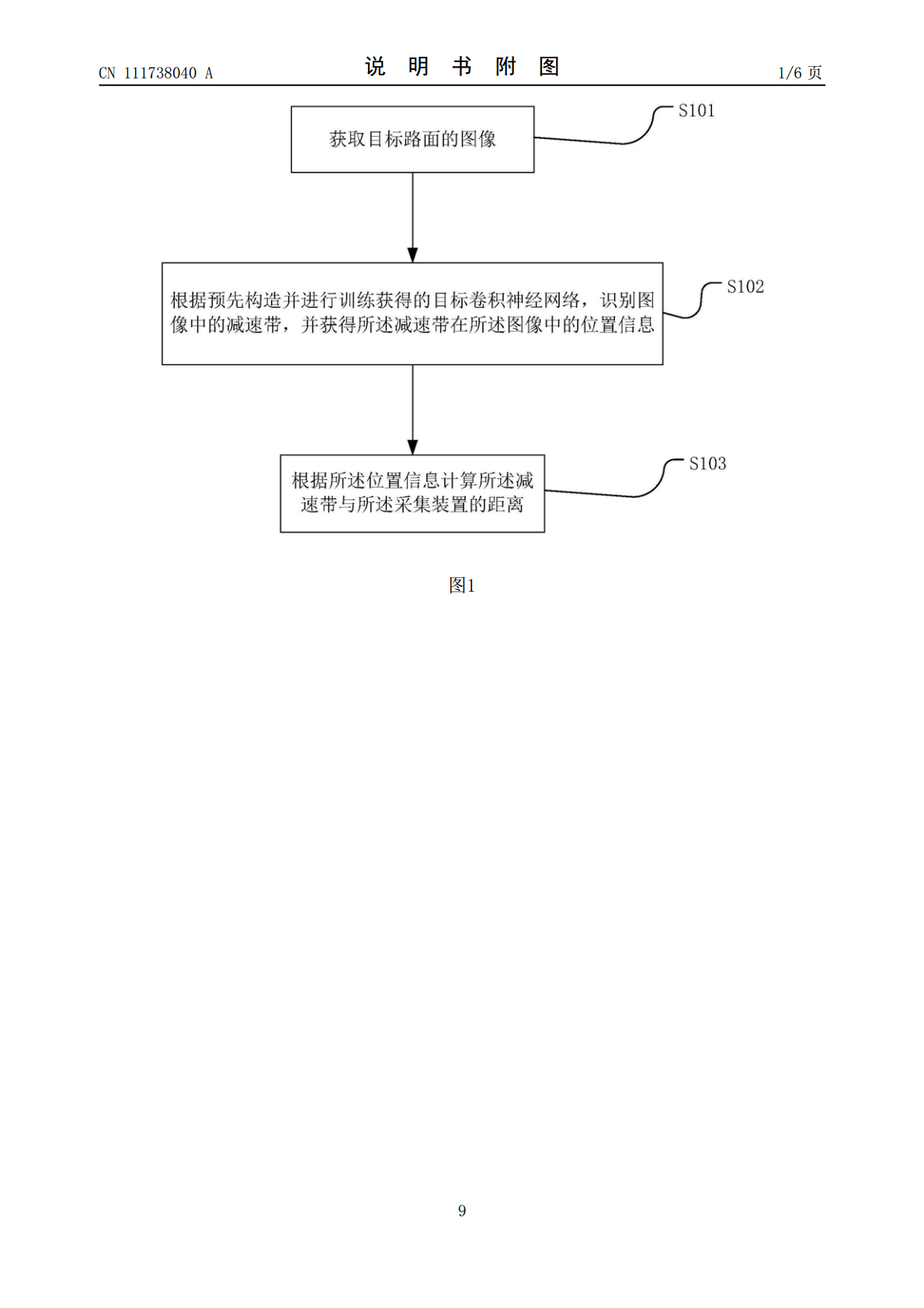
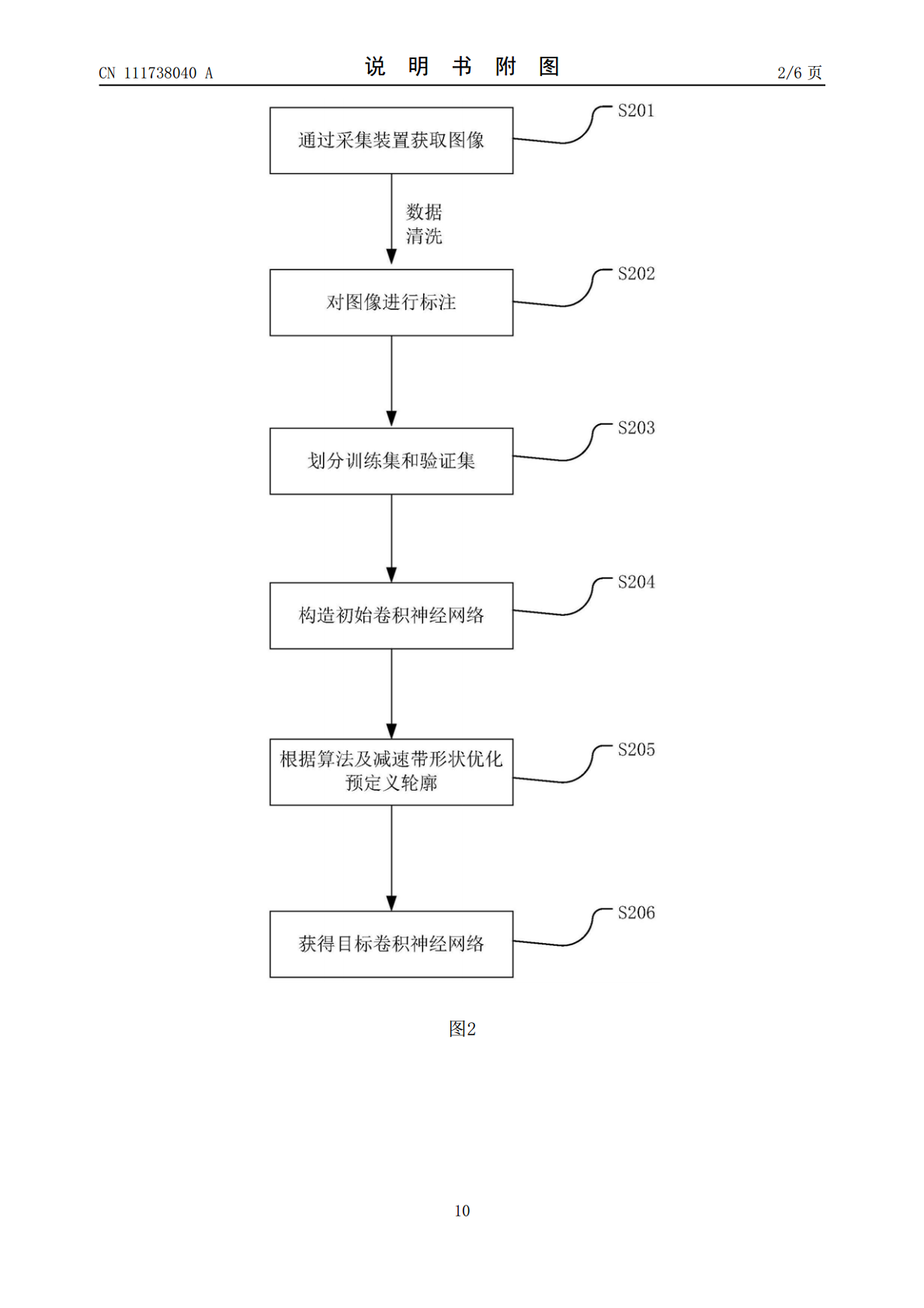
本发明实施例提供一种减速带识别方法及系统,涉及检测技术领域。其中方法包括:构建包括多个级联卷积层和至少2个全连接层的初始卷积神经网络;利用训练图像对初始卷积神经网络进行训练,获取目标卷积神经网络;根据目标卷积神经网络识别图像中的减速带,并获得减速带在图像中的位置信息;该初始卷积神经网络的输出维度包括是否含有减速带、减速带数量及减速带的位置。本发明可以在识别图像中是否含有减速带的同时获得减速带的位置信息,进而通过计算获得减速带与图像采集装置之间的距离。由于预先构造的初始卷积神经网络的预定义轮廓经过算法优化,
一种减速带能量回收系统.pdf
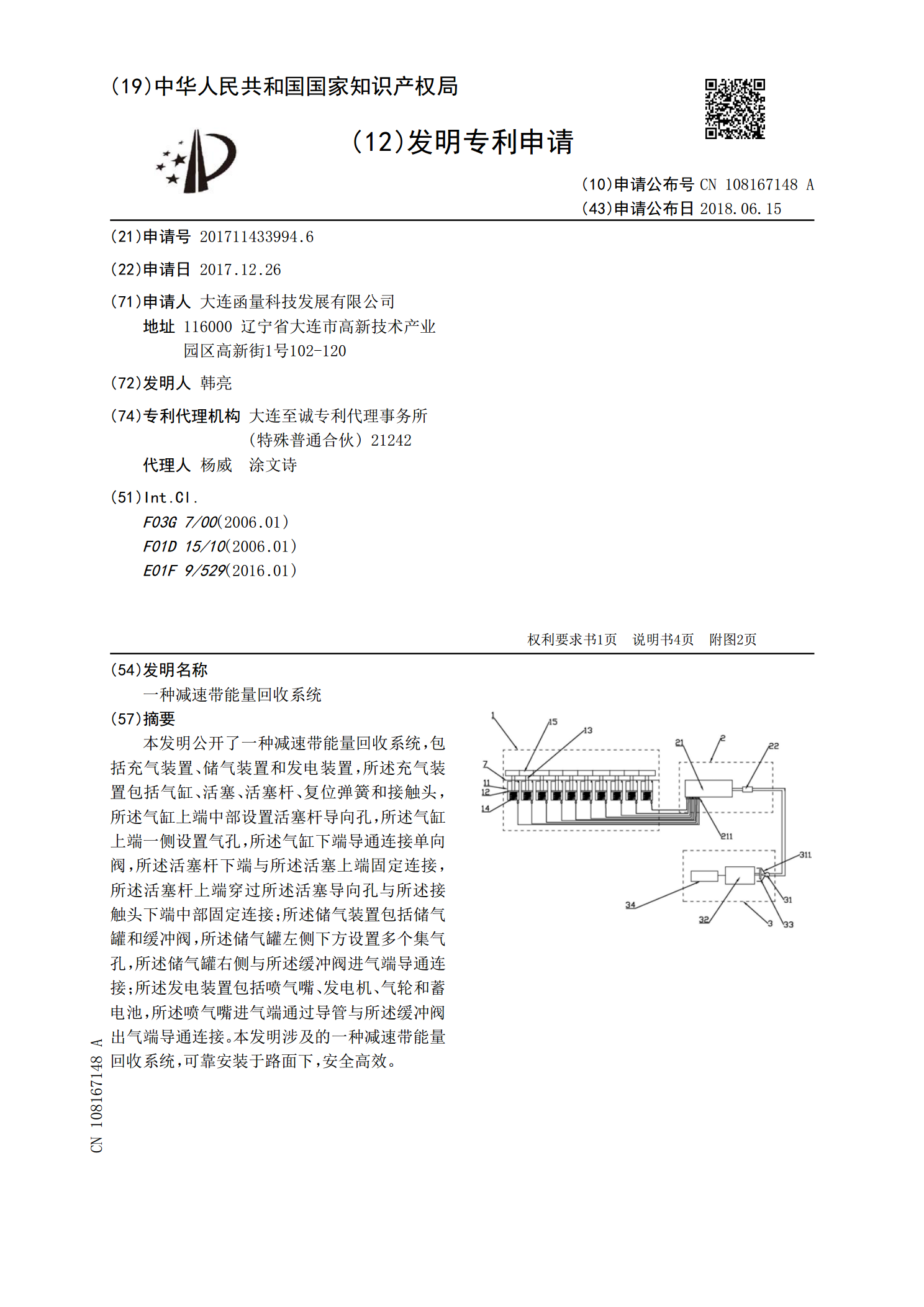
本发明公开了一种减速带能量回收系统,包括充气装置、储气装置和发电装置,所述充气装置包括气缸、活塞、活塞杆、复位弹簧和接触头,所述气缸上端中部设置活塞杆导向孔,所述气缸上端一侧设置气孔,所述气缸下端导通连接单向阀,所述活塞杆下端与所述活塞上端固定连接,所述活塞杆上端穿过所述活塞导向孔与所述接触头下端中部固定连接;所述储气装置包括储气罐和缓冲阀,所述储气罐左侧下方设置多个集气孔,所述储气罐右侧与所述缓冲阀进气端导通连接;所述发电装置包括喷气嘴、发电机、气轮和蓄电池,所述喷气嘴进气端通过导管与所述缓冲阀出气端导

一种公路减速带振动发电系统.pdf
本发明具体涉及一种公路减速带振动发电系统。目的是提供一种结构简单、成本低、与减速带一起安装后,使用安全可靠、安装维修方便的公路减速带振动发电系统。所述发电系统包括减速带,所述底板两端设置齿板,所述振动壳体上的第一壳板的两端设有与齿板相适应的啮合板,第一壳板与固定板之间设置发电结构。当汽车以较高速度驶过减速度带时,减速带在第一次带动振动壳体向上下运动后,第二次向下振动过程中与振动壳体脱开,此后减速带在弹簧和减振器的作用下振幅迅速衰减,而振动壳体则继续单独上下振动进行发电。当下一辆车行驶至减速带前,减速带已迅

一种基于减速带声音分析的车辆参数识别方法.pdf
本发明涉及一种基于减速带声音分析的车辆参数识别方法,它通过对传感器实时采集的车辆通过两条减速带时的声波波形;利用波峰时间和两条减速带之间的距离,得到车辆的车速;在得到车速的基础上,进一步得到车辆的两轮间的轴距,得到轴距之后,通过与基本车辆类型轴距信息对比推断得到被检车辆的车型,完成车辆分类。本发明只需一个传感器,克服了多传感器检测环境下,同步困难的缺点;该方法较易获得减速带声音波形,主要在时域内完成车辆车速的测定和车型的识别,比其他已有方法更加简单、准确。

一种新型公路减速带振动发电系统.pdf
本发明具体涉及一种新型公路减速带振动发电系统。目的是提供一种结构简单、成本低、与减速带一起安装后,使用安全可靠、安装维修方便的新型公路减速带振动发电系统。所述发电系统包括减速带,所述底板两端设置齿板,所述振动壳体上的第一壳板的两端设有与齿板相适应的啮合板,第一壳板与固定板之间设置发电结构。当汽车以较高速度驶过减速度带时,减速带在第一次带动振动壳体向上下运动后,第二次向下振动过程中与振动壳体脱开,此后减速带在弹簧和减振器的作用下振幅迅速衰减,而振动壳体则继续单独上下振动进行发电。当下一辆车行驶至减速带前,减