
防过度自平衡的方法、终端、介质、及移动平衡装置.pdf

永梅****33


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

防过度自平衡的方法、终端、介质、及移动平衡装置.pdf
本申请提供防过度自平衡的方法、终端、介质、及移动平衡装置,其中,所述方法包括:获取用于使移动平衡装置恢复至静态平衡状态的补偿速度的速度信息;施加至少一方向与补偿速度的方向相反且数值随补偿速度的数值同向变化的扭矩至所述移动平衡装置,以防止移动平衡装置过度自平衡。本申请的技术方案能够在移动平衡装置发生自平衡时,为移动平衡装置施加一扭矩大小随车轮转速的变化而相应发生变化的反向扭矩,减小因惯性造成的过度矫正,大大提升了装置的自平衡有效性,起到了防止移动平衡装置因过度自平衡而进入死循环的作用。

姿态自调整的可操作式移动平衡装置、方法、终端及介质.pdf
本申请提供姿态自调整的可操作式移动平衡装置、方法、终端及介质,其中,所述装置包括:姿态检测单元,用于检测装置姿态数据;控制单元,其通信连接所述姿态检测单元以接收所述装置姿态数据;移动单元,其电性连接并受控于所述控制单元;重心调整单元,其电性连接并受控于所述控制单元。本申请通过采集平衡装置的姿态数据判断装置平衡与否,并通过控制平衡装置的车轮转速和/或通过控制重心调整组件的位移量来实现将平衡装置从当前的不稳状态调整回稳定姿态,从而有效解决了电动平衡车自身处于静止状态但因其开发的功能所造成的车体失衡问题,适用于

防海浪自平衡装置.pdf
本发明公开了防海浪自平衡装置,包括底座,所述底座的顶部活动连接有固定架,所述固定架的顶部镶嵌有球形块,所述球形块的底部固定连接有支杆,所述支杆的底部贯穿至底座的内腔,所述支杆的底部固定连接有配重块。本发明因为底座是固定在船体上的,当船体受到风浪而摇摆时,底座和固定架随着船体以球形块为运动中心做角度倾斜运动,而此时配重块在地心引力的作用下始终保持垂直向下的状态,并且底座在倾斜时,滚珠的底部与底座内腔底部的弧面接触并滑动,提高了配重块的灵活性,进而使得放置板顶部的物品始终处于平行放置的状态,并且不会因移动碰撞
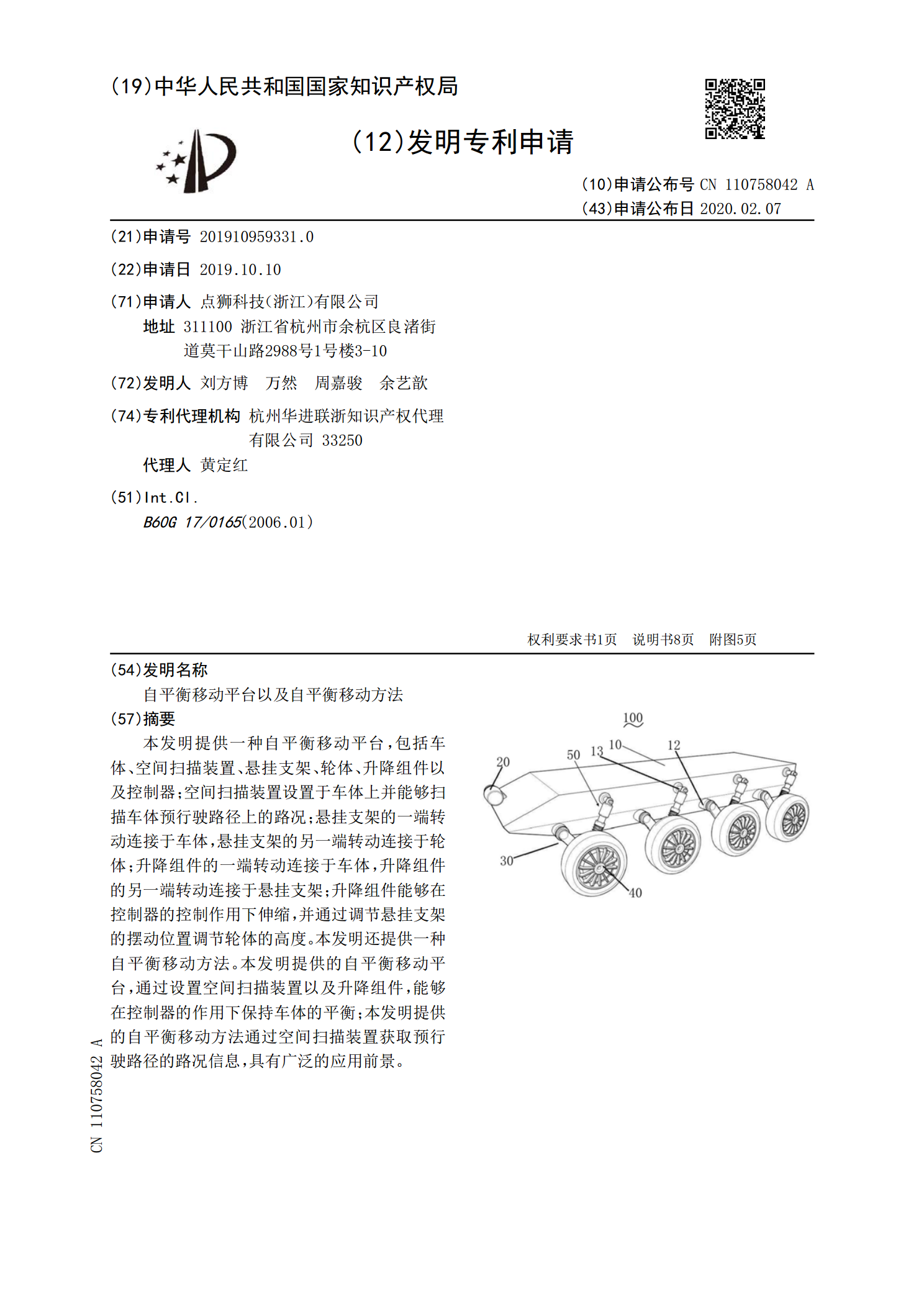
自平衡移动平台以及自平衡移动方法.pdf
本发明提供一种自平衡移动平台,包括车体、空间扫描装置、悬挂支架、轮体、升降组件以及控制器;空间扫描装置设置于车体上并能够扫描车体预行驶路径上的路况;悬挂支架的一端转动连接于车体,悬挂支架的另一端转动连接于轮体;升降组件的一端转动连接于车体,升降组件的另一端转动连接于悬挂支架;升降组件能够在控制器的控制作用下伸缩,并通过调节悬挂支架的摆动位置调节轮体的高度。本发明还提供一种自平衡移动方法。本发明提供的自平衡移动平台,通过设置空间扫描装置以及升降组件,能够在控制器的作用下保持车体的平衡;本发明提供的自平衡移动
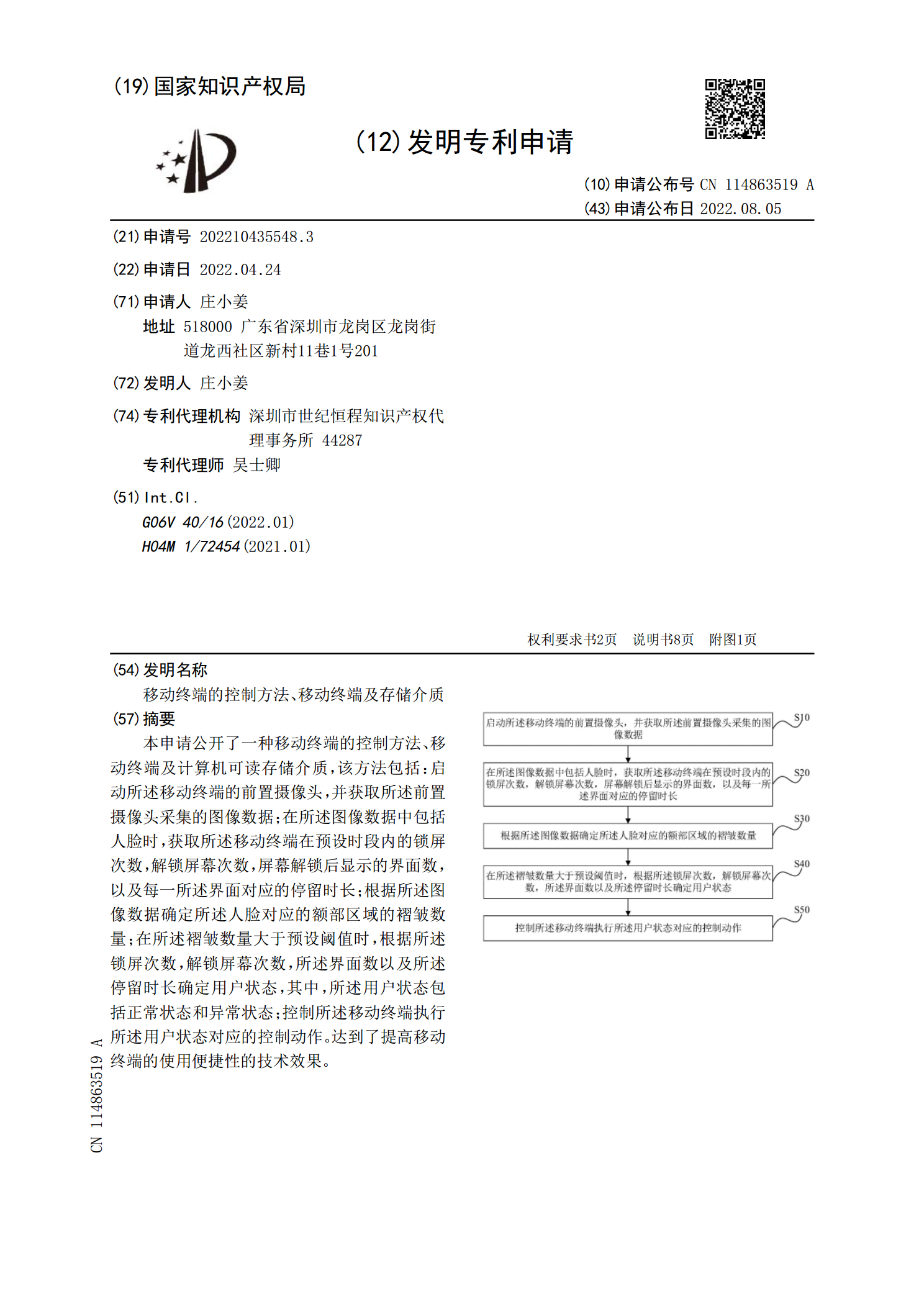
移动终端的控制方法、移动终端及存储介质.pdf
本申请公开了一种移动终端的控制方法、移动终端及计算机可读存储介质,该方法包括:启动所述移动终端的前置摄像头,并获取所述前置摄像头采集的图像数据;在所述图像数据中包括人脸时,获取所述移动终端在预设时段内的锁屏次数,解锁屏幕次数,屏幕解锁后显示的界面数,以及每一所述界面对应的停留时长;根据所述图像数据确定所述人脸对应的额部区域的褶皱数量;在所述褶皱数量大于预设阈值时,根据所述锁屏次数,解锁屏幕次数,所述界面数以及所述停留时长确定用户状态,其中,所述用户状态包括正常状态和异常状态;控制所述移动终端执行所述用户状