
车辆重心高度测量装置和方法.pdf

猫巷****觅蓉

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆重心高度测量装置和方法.pdf
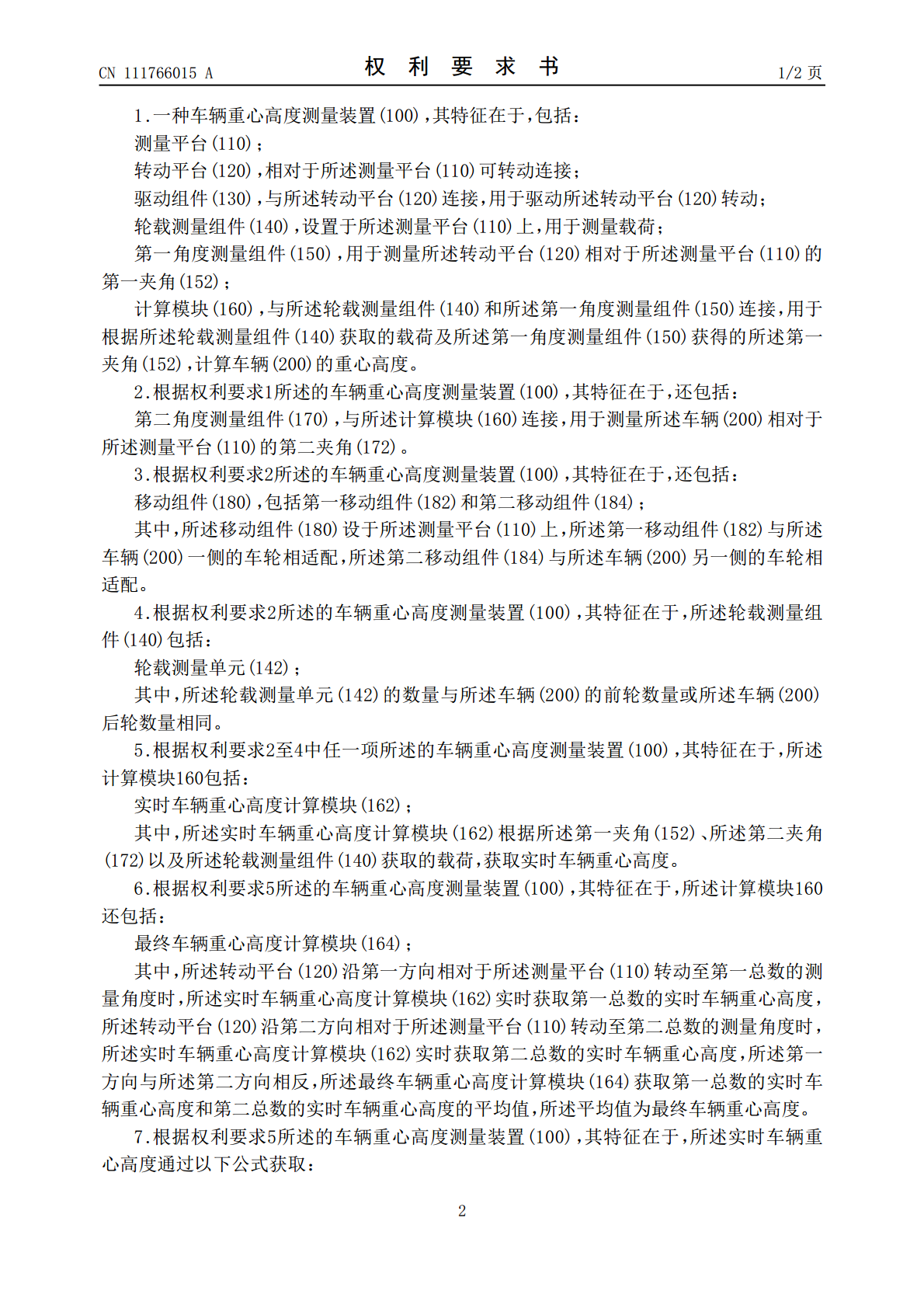
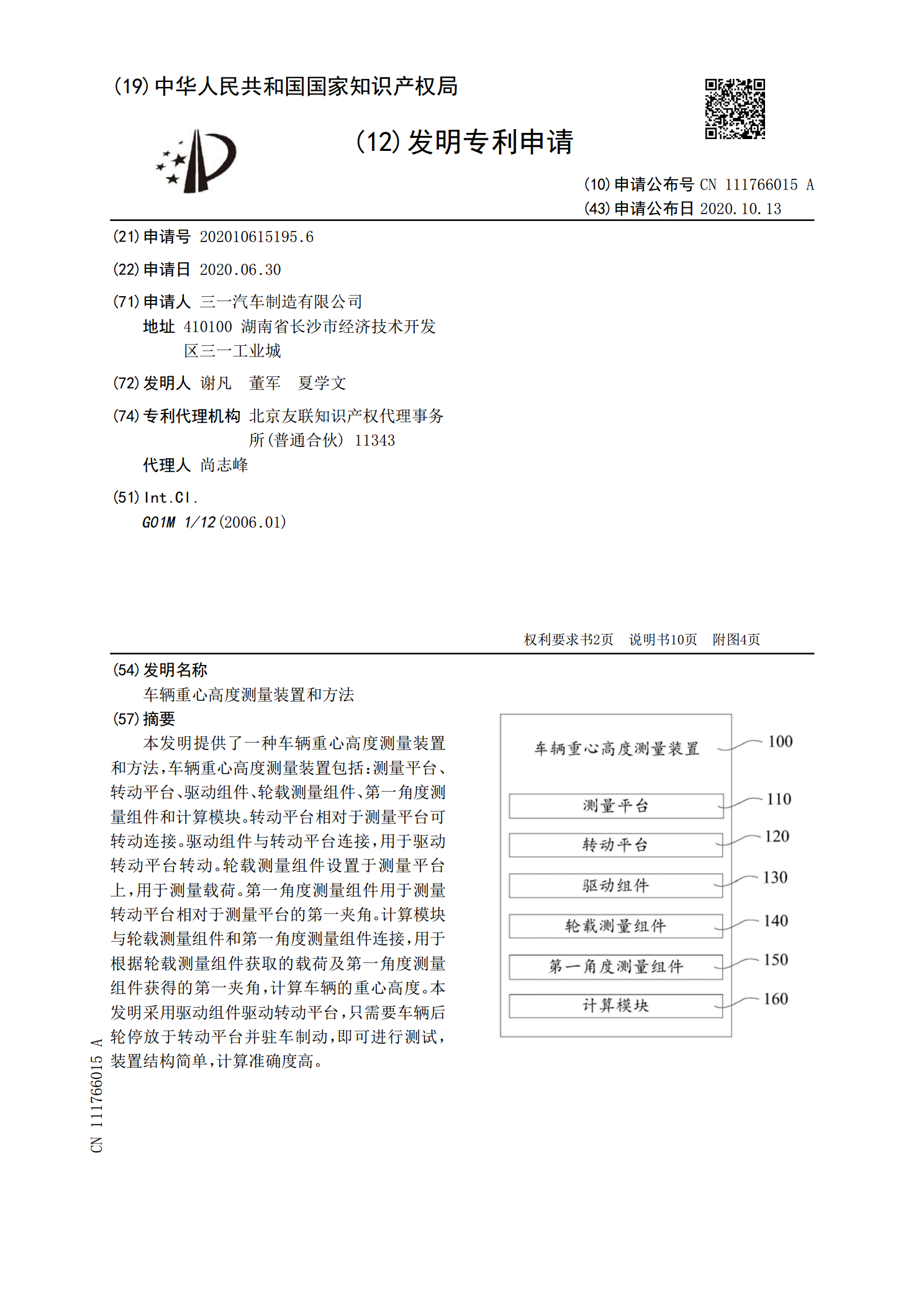
本发明提供了一种车辆重心高度测量装置和方法,车辆重心高度测量装置包括:测量平台、转动平台、驱动组件、轮载测量组件、第一角度测量组件和计算模块。转动平台相对于测量平台可转动连接。驱动组件与转动平台连接,用于驱动转动平台转动。轮载测量组件设置于测量平台上,用于测量载荷。第一角度测量组件用于测量转动平台相对于测量平台的第一夹角。计算模块与轮载测量组件和第一角度测量组件连接,用于根据轮载测量组件获取的载荷及第一角度测量组件获得的第一夹角,计算车辆的重心高度。本发明采用驱动组件驱动转动平台,只需要车辆后轮停放于转动
车辆重心对高度的影响演示装置.pdf
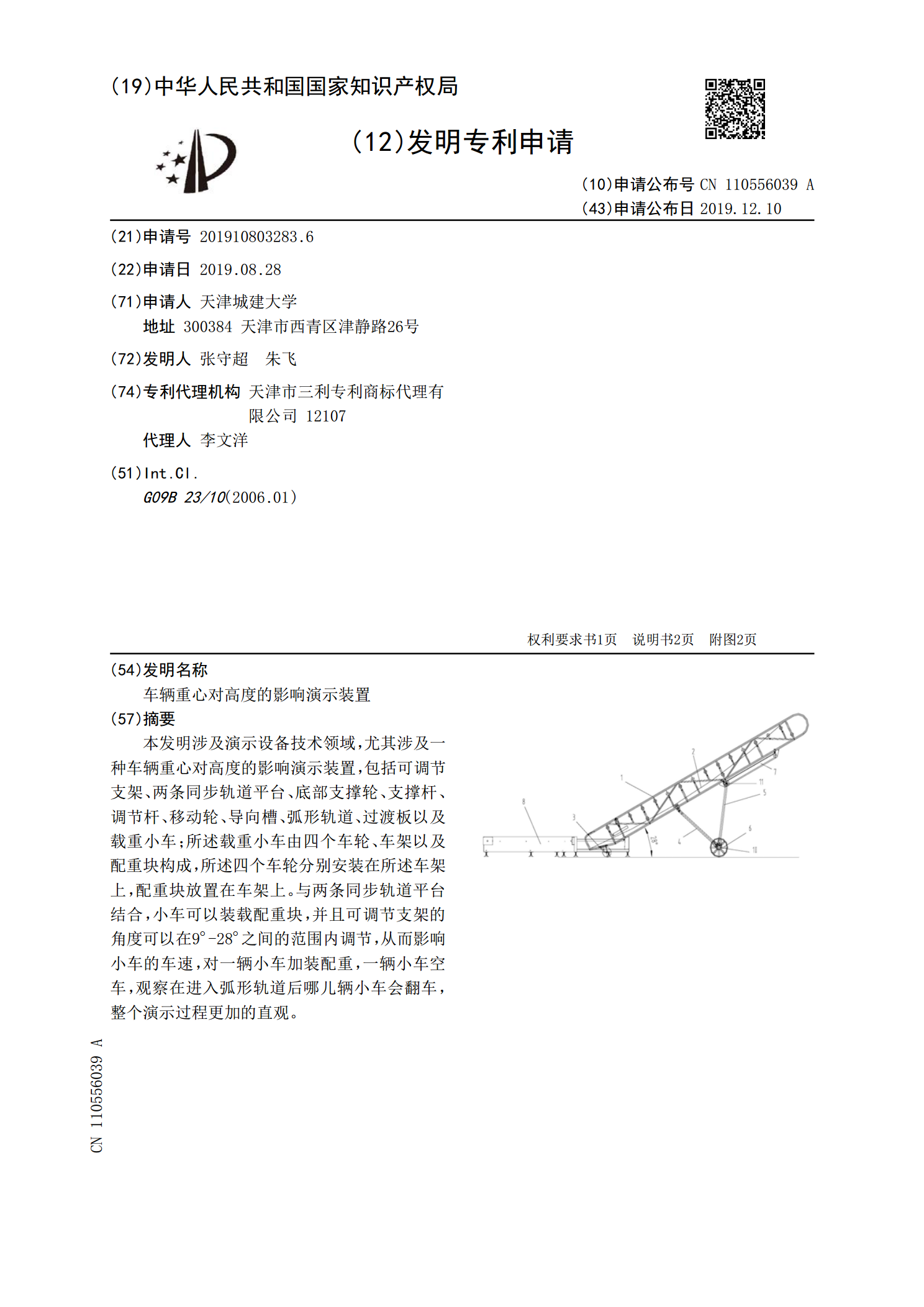
本发明涉及演示设备技术领域,尤其涉及一种车辆重心对高度的影响演示装置,包括可调节支架、两条同步轨道平台、底部支撑轮、支撑杆、调节杆、移动轮、导向槽、弧形轨道、过渡板以及载重小车;所述载重小车由四个车轮、车架以及配重块构成,所述四个车轮分别安装在所述车架上,配重块放置在车架上。与两条同步轨道平台结合,小车可以装载配重块,并且可调节支架的角度可以在9°‑28°之间的范围内调节,从而影响小车的车速,对一辆小车加装配重,一辆小车空车,观察在进入弧形轨道后哪儿辆小车会翻车,整个演示过程更加的直观。

估计车辆重心高度的方法.pdf
本发明涉及一种用于估计至少具有前轴和后轴的车辆的重心高度的方法,所述前轴和后轴各装有至少两个车轮,该方法包括以下步骤:a)确定第一制动时段和第二制动时段,该第一制动时段和第二制动时段发生在具有基本相同坡度的道路部分,但是其中第一和第二制动时段导致不同的车辆减速度,并且在两个制动时段期间,至少估计以下变量:车辆加速度(Acc);关于前轴和后轴的车轮滑移率(WSR);在前轴和后轴的每个的制动力(Bkf)或者制动扭矩,或者其比率(K);和相应的道路部分的坡度(Slp);b)仅使用步骤a)的在两个时段期间作出的估
确定车辆的重心高度的方法.pdf
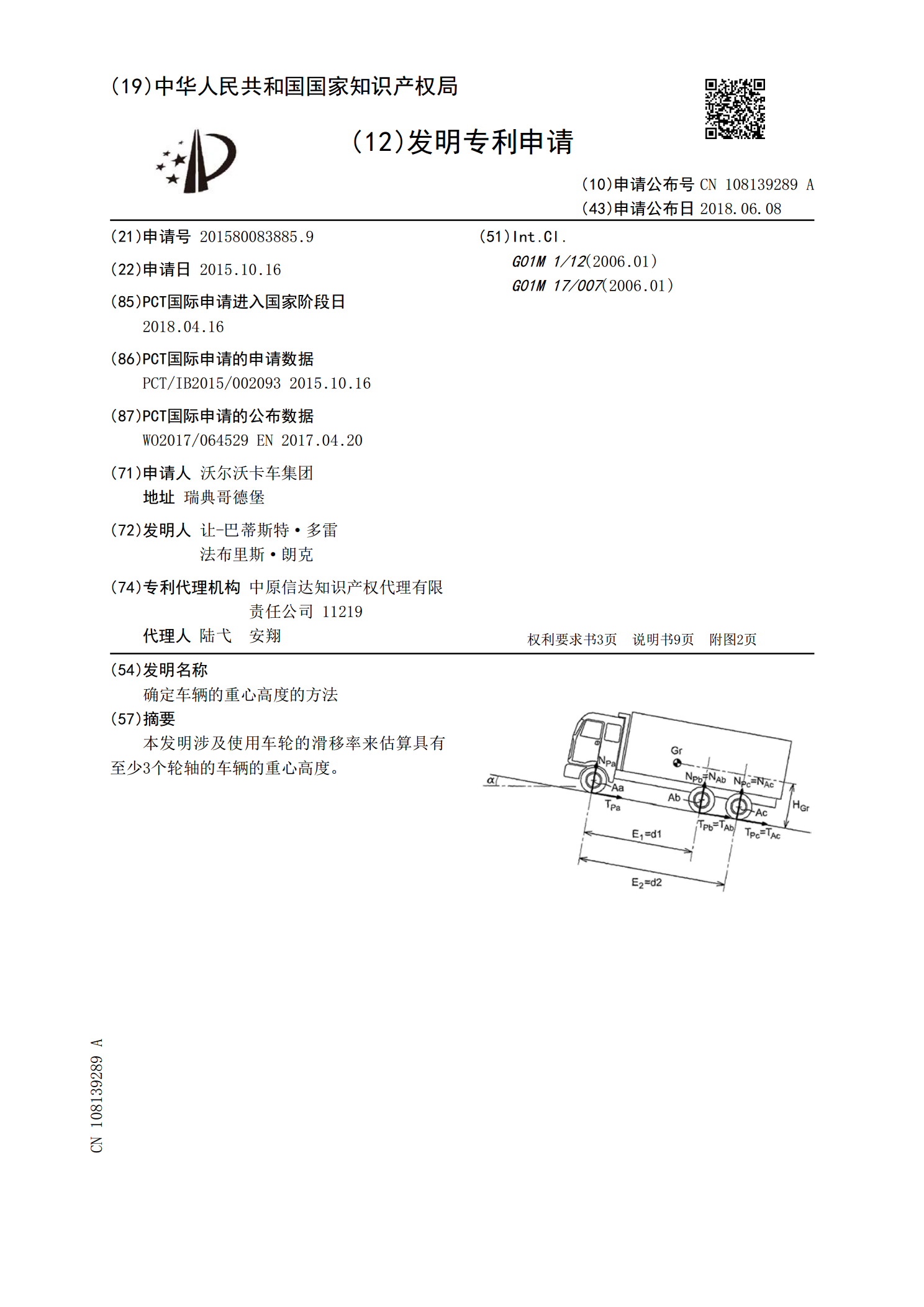
本发明涉及使用车轮的滑移率来估算具有至少3个轮轴的车辆的重心高度。

车辆重心测量方法.pdf
一种车辆重心测量方法,包括:根据车辆所受重力与第一车轴所受支撑力相对于第二车轴的中心线力矩平衡,计算车辆重心的纵向位置,所述第一车轴为所述车辆的前轮车轴和后轮车轴中的任意一个,所述第二车轴为所述车辆的另一车轴;根据所述车辆的两侧车轮所受地面支撑力相对于重心投影点力矩平衡,计算车辆重心的横向位置,其中所述重心投影点为所述车辆重心在水平面上的投影点;举升所述第一车轴,并通过举升角的正切值和所述第二车轴的轴荷的变化确定所述车辆重心的高度。该方法操作简单,无需复杂的测量设备,成本低,且测量准确度高。