
一种基于S试件加工误差的数控机床动态误差溯源方法.pdf

努力****向丝

1/10

2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于S试件加工误差的数控机床动态误差溯源方法.pdf
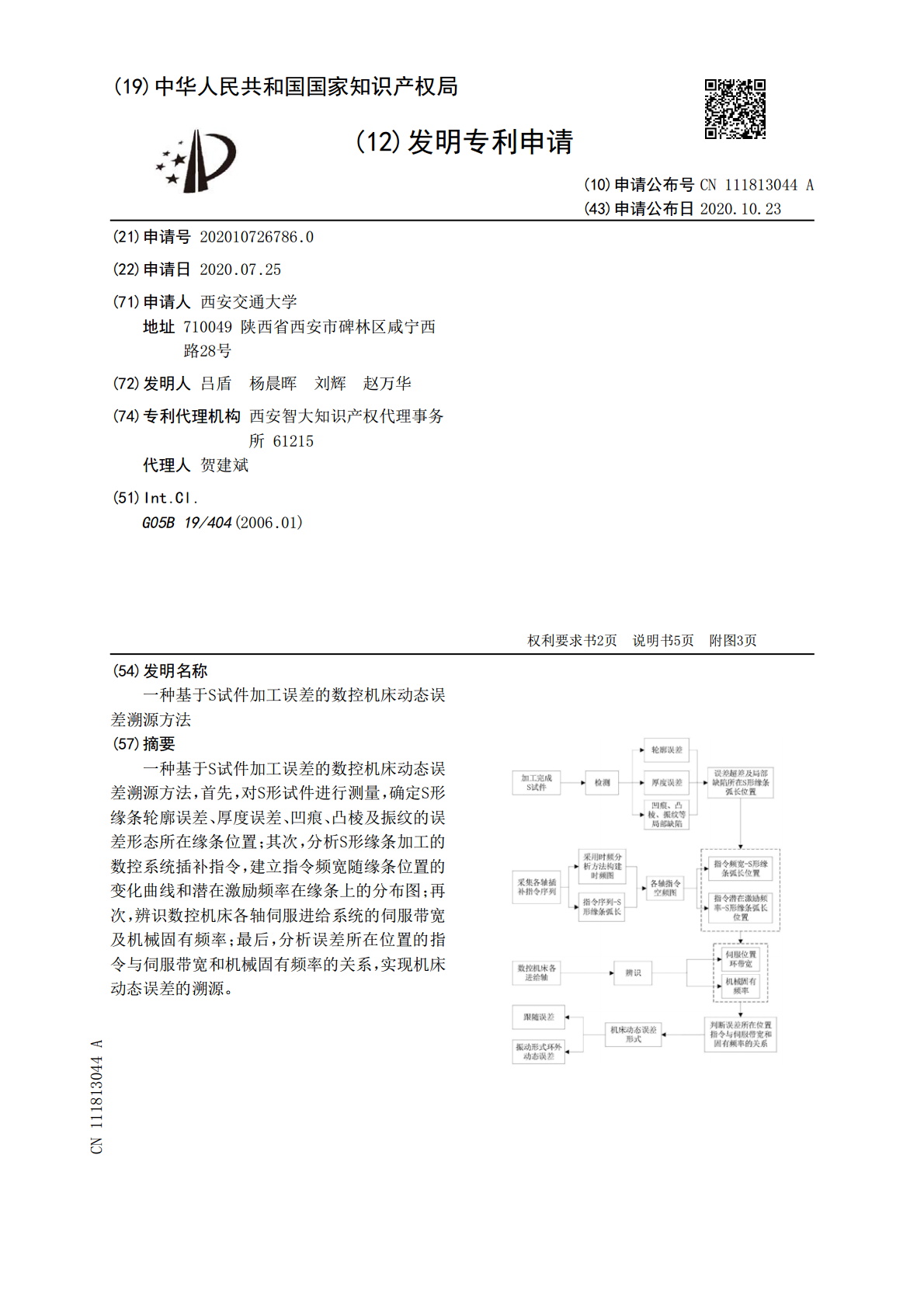
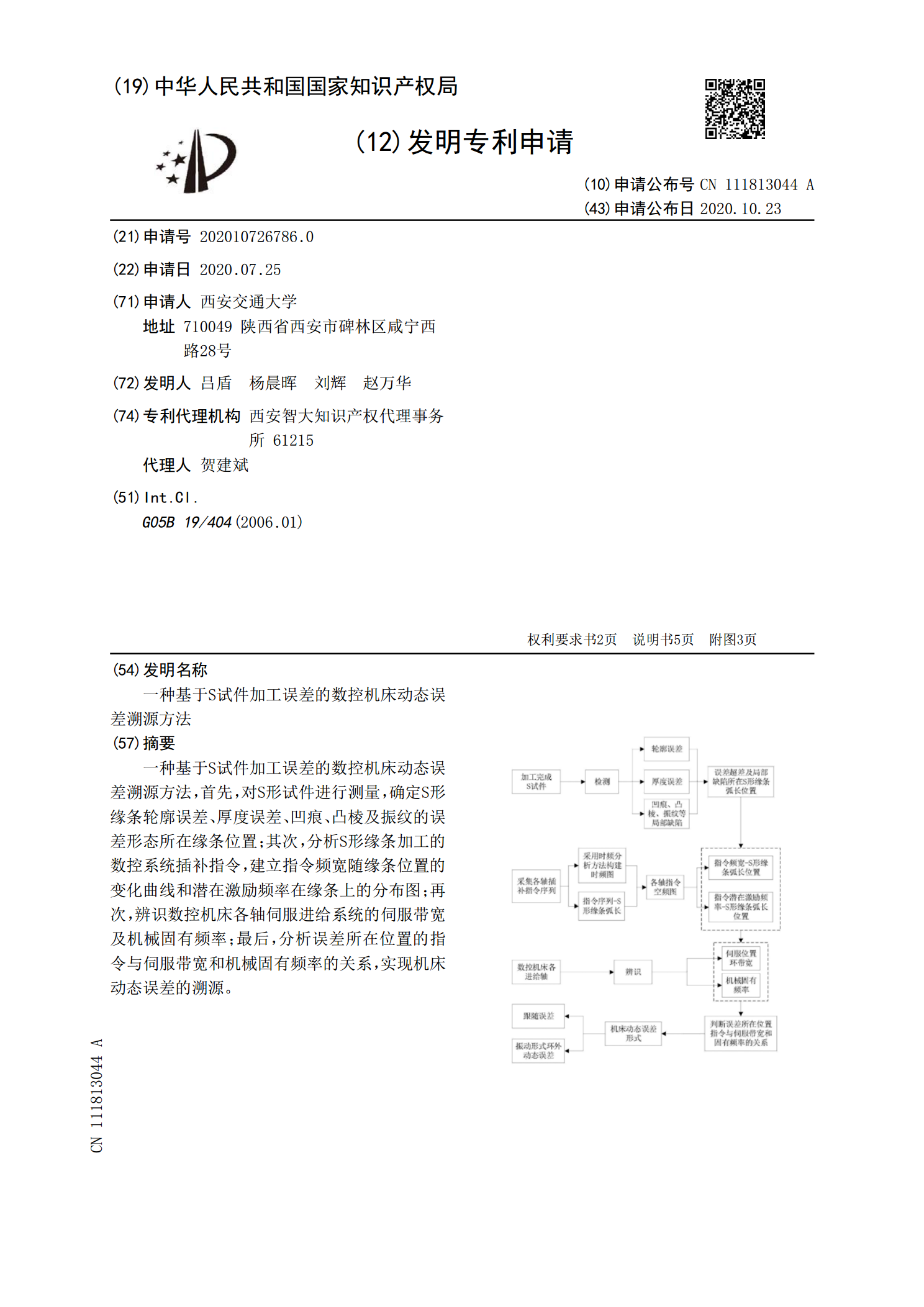
一种基于S试件加工误差的数控机床动态误差溯源方法,首先,对S形试件进行测量,确定S形缘条轮廓误差、厚度误差、凹痕、凸棱及振纹的误差形态所在缘条位置;其次,分析S形缘条加工的数控系统插补指令,建立指令频宽随缘条位置的变化曲线和潜在激励频率在缘条上的分布图;再次,辨识数控机床各轴伺服进给系统的伺服带宽及机械固有频率;最后,分析误差所在位置的指令与伺服带宽和机械固有频率的关系,实现机床动态误差的溯源。
基于“S”形检验试件的五轴联动数控机床动态误差检验方法.pdf
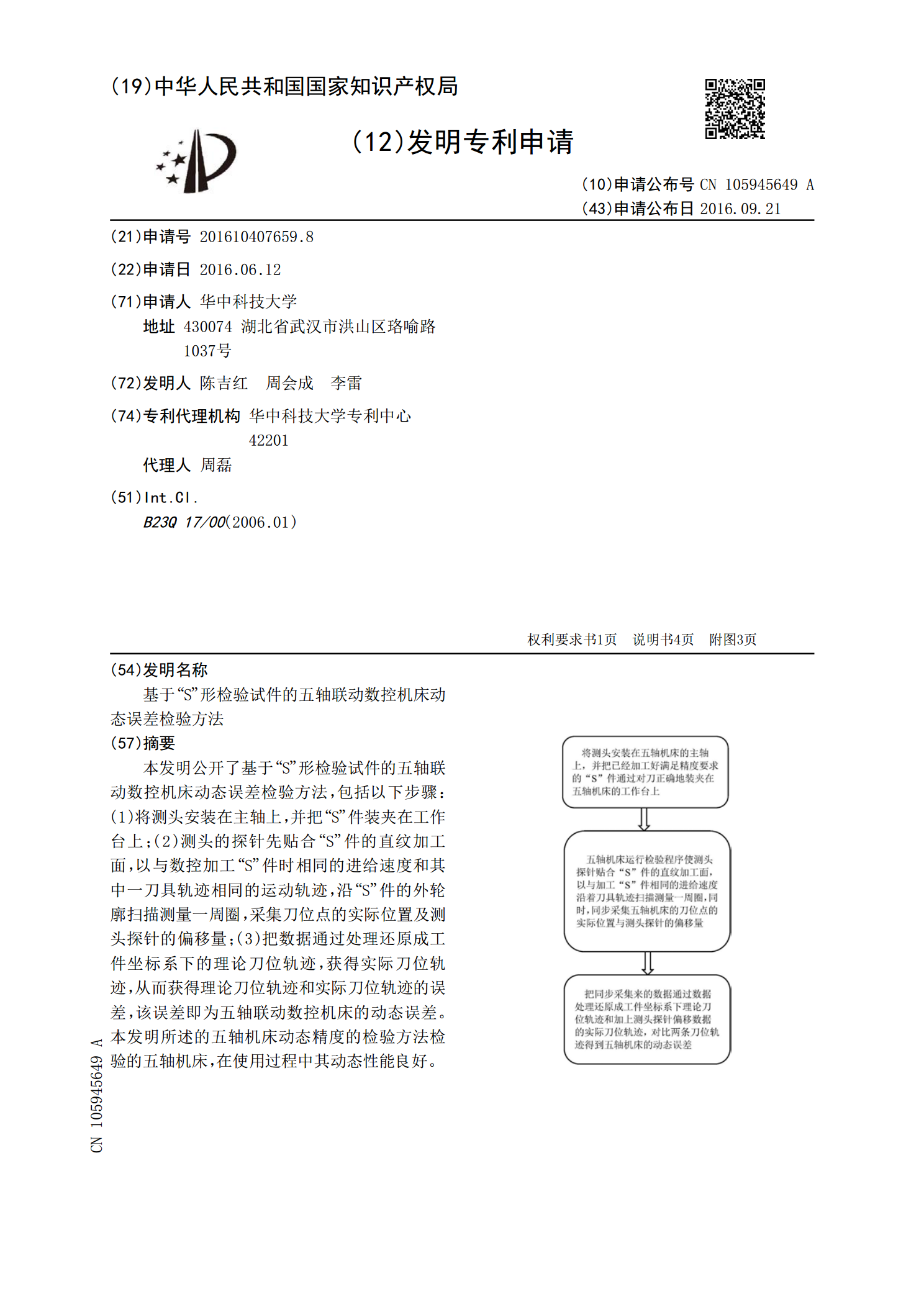
本发明公开了基于“S”形检验试件的五轴联动数控机床动态误差检验方法,包括以下步骤:(1)将测头安装在主轴上,并把“S”件装夹在工作台上;(2)测头的探针先贴合“S”件的直纹加工面,以与数控加工“S”件时相同的进给速度和其中一刀具轨迹相同的运动轨迹,沿“S”件的外轮廓扫描测量一周圈,采集刀位点的实际位置及测头探针的偏移量;(3)把数据通过处理还原成工件坐标系下的理论刀位轨迹,获得实际刀位轨迹,从而获得理论刀位轨迹和实际刀位轨迹的误差,该误差即为五轴联动数控机床的动态误差。本发明所述的五轴机床动态精度的检验方

基于内置传感器的数控机床动态加工误差测量方法.docx
基于内置传感器的数控机床动态加工误差测量方法基于内置传感器的数控机床动态加工误差测量方法摘要:数控机床作为现代制造业的核心设备之一,其加工精度和稳定性对于产品质量和生产效率具有重要影响。因此,准确测量数控机床的动态加工误差对于实现高精度加工具有关键作用。本文提出了一种基于内置传感器的数控机床动态加工误差测量方法,该方法通过利用内置传感器获取顶点位置信息和反馈信号,实时监测加工误差并进行修正,从而提高加工精度和稳定性。实验结果表明,该方法能够有效地测量数控机床的动态加工误差,并且具有较高的精度和可靠性。关键

基于EEMD和BPNN的动态误差溯源研究.docx
基于EEMD和BPNN的动态误差溯源研究综述误差溯源是指通过对系统出现误差的原因进行分析,以了解整个系统的特性和性能的一种方法。在现代工业中,误差溯源越来越受到关注,它是提高生产效率和质量的关键步骤。在误差溯源研究中,一个关键的问题是如何精确的检测、诊断和监测误差来源。近年来,EEMD和BPNN两种方法在误差溯源方面得到了广泛的应用。其中,EEMD是一种新兴的信号处理方法,它可以将非线性和非平稳信号分解成若干个固有模态函数(IMF),常用于信号分析和挖掘。而BPNN可以通过反向传播算法进行学习和训练,常用

一种减小“S”形试件理论切削误差的方法.docx
一种减小“S”形试件理论切削误差的方法减小“S”形试件理论切削误差的方法摘要:在机械加工过程中,切削误差是一个常见的问题,特别是对于“S”形试件。本论文介绍了一种减小“S”形试件理论切削误差的方法。首先,分析了“S”形试件切削误差的原因,包括工件结构、工具磨损、工艺参数等因素。然后,介绍了一些常用的理论切削误差修正方法,包括传统方法和新型方法。最后,通过实验验证了这些方法的可行性,证明了通过使用这些方法可以显著减小“S”形试件的理论切削误差。关键词:切削误差;“S”形试件;修正方法;实验验证1.导言在机械