
电液伺服系统.ppt

qw****27


1/10
2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

电液伺服系统.ppt
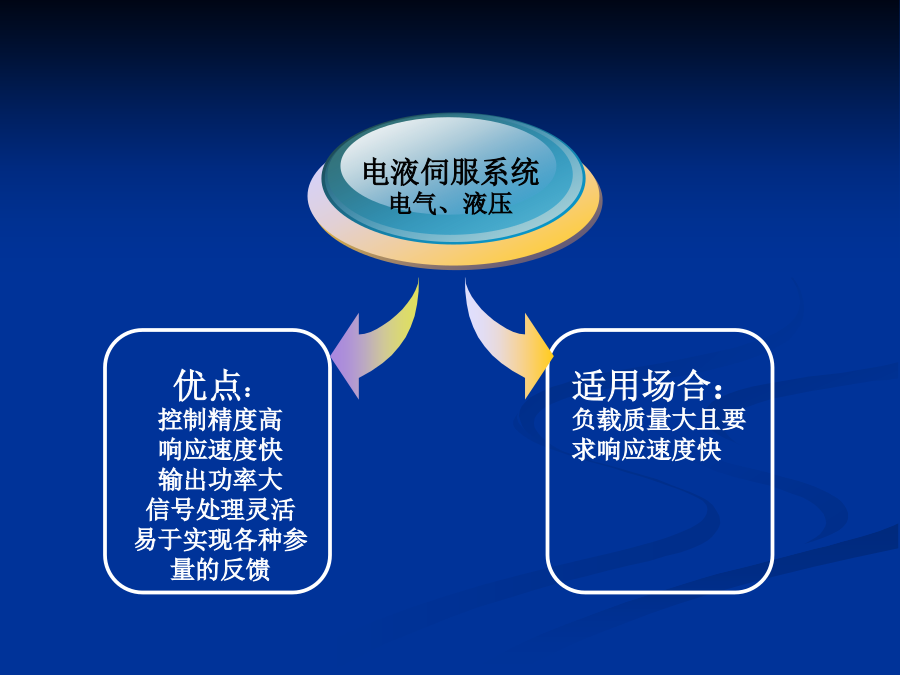
电液伺服系统第一节电液伺服系统的类型一、模拟伺服系统在模拟伺服系统中,全部信号都是连续的模拟量。模拟伺服系统重复精度高,但分辨能力较低(绝对精度低)。模拟伺服系统中微小信号容易受噪声和零漂的影响。二、数字伺服系统在数字伺服系统中,全部信号或部分信号是离散参量,因此数字伺服系统又分为:全数字伺服系统和数字模拟伺服系统两种。数字伺服系统有很高的绝对精度;受模拟量的噪声和零漂的影响很小。当要求较高的绝对精度,而不是重复精度时,常采用数字伺服系统。从经济性、可靠性方面来看,简单的伺服系统以采用模拟型控制为宜。第二

电液伺服系统.doc
☆电液伺服系统1、液压伺服泵站额定压力为最高40MPa,额定流量最大为2000l/min,压力脉动小于0.1MPa。2、位置控制系统3、速度控制系统4、力控制系统5、加速度控制系统

电液伺服系统的发展与应用.pdf

电液伺服系统的开发研究.docx
电液伺服系统的开发研究电液伺服系统的开发与研究摘要:电液伺服系统是一种通过电气控制来实现对液压系统运动的精确控制的系统。本论文主要深入研究了电液伺服系统的开发和应用。首先介绍了电液伺服系统的基本原理和组成部分,然后详细讨论了电液伺服系统的控制策略和性能优化方法。最后,通过实际应用案例来验证电液伺服系统在工业自动化领域的重要性和潜力。第一部分:引言电液伺服系统是一种基于液压技术的自动化控制系统,具有结构简单、力矩大、输电功率高等特点。目前,在工业自动化领域得到广泛应用,如机床、模具、自动生产线等。本论文通过
一种电液伺服系统.pdf
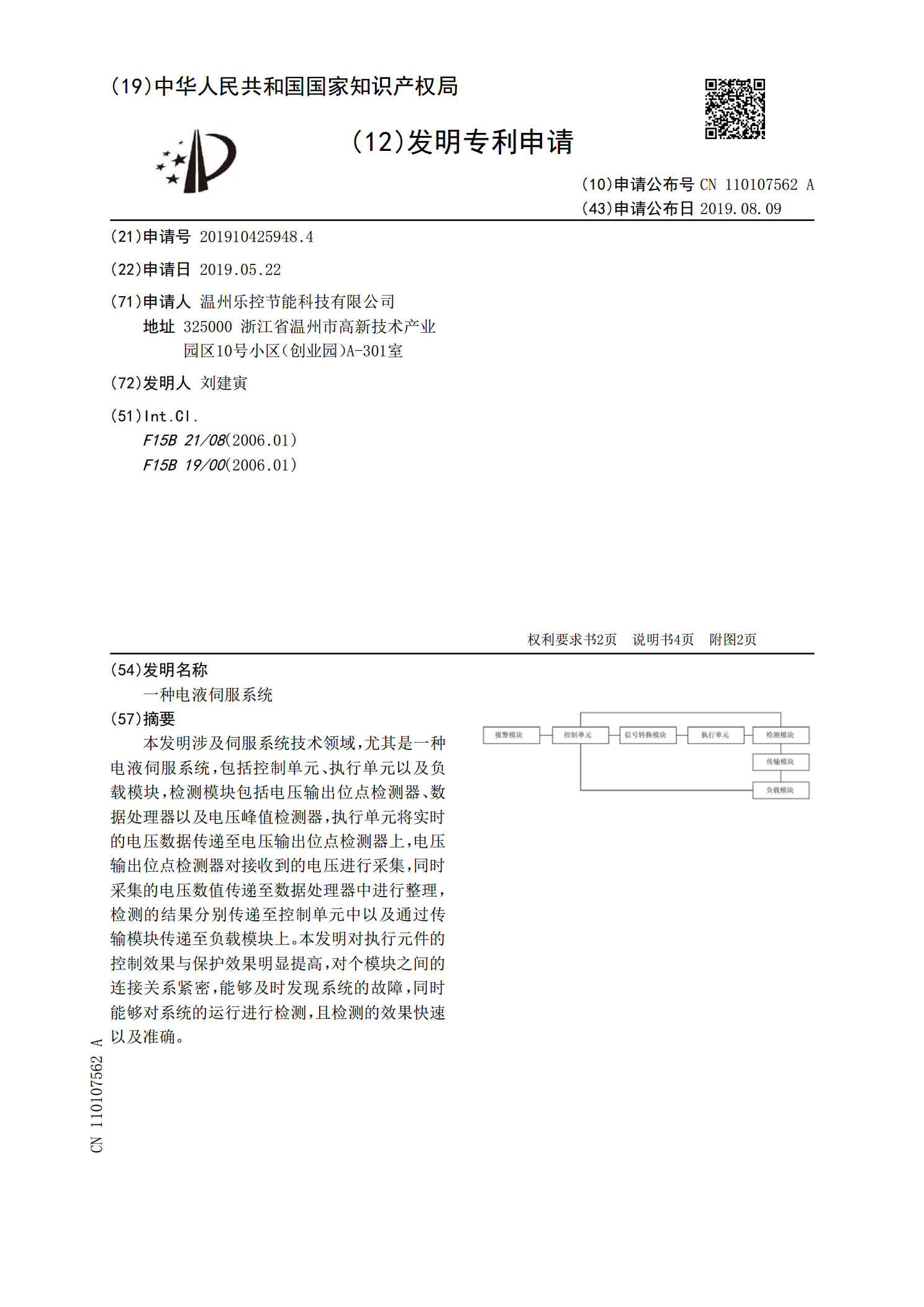
本发明涉及伺服系统技术领域,尤其是一种电液伺服系统,包括控制单元、执行单元以及负载模块,检测模块包括电压输出位点检测器、数据处理器以及电压峰值检测器,执行单元将实时的电压数据传递至电压输出位点检测器上,电压输出位点检测器对接收到的电压进行采集,同时采集的电压数值传递至数据处理器中进行整理,检测的结果分别传递至控制单元中以及通过传输模块传递至负载模块上。本发明对执行元件的控制效果与保护效果明显提高,对个模块之间的连接关系紧密,能够及时发现系统的故障,同时能够对系统的运行进行检测,且检测的效果快速以及准确。