
FANUC 系统伺服调试的方法及步骤.pdf

qw****27

1/10
2/10
3/10
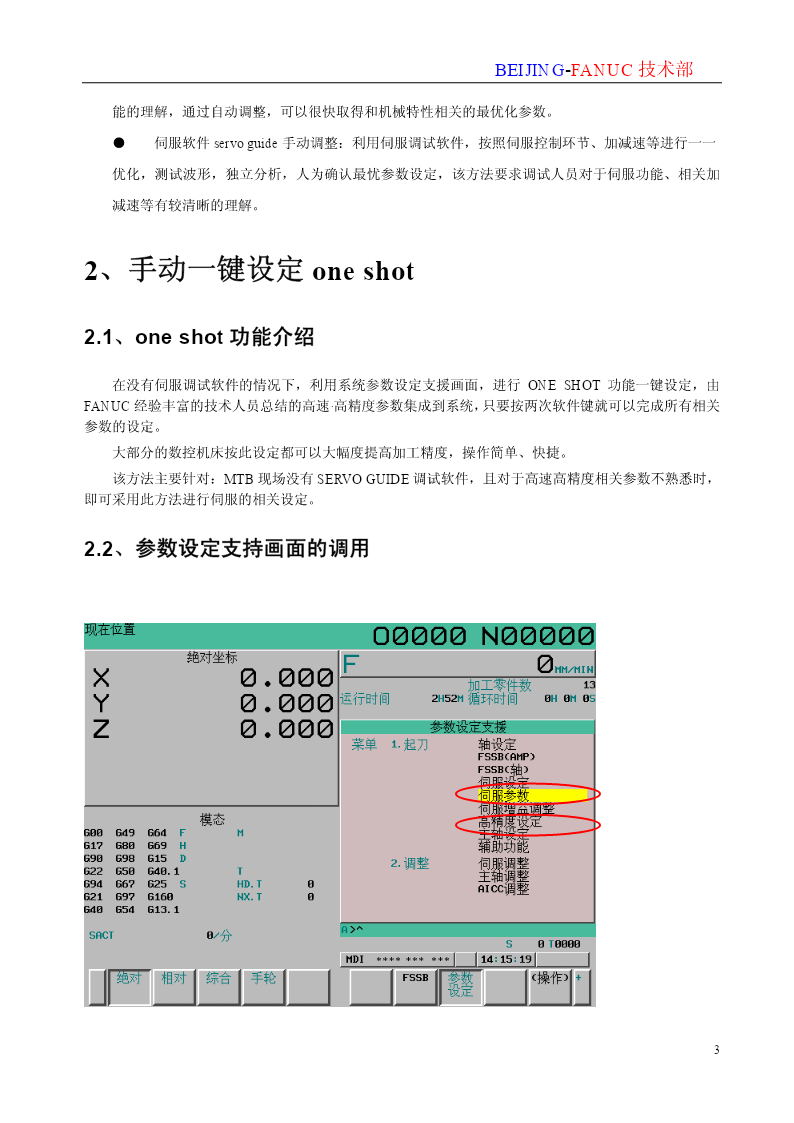
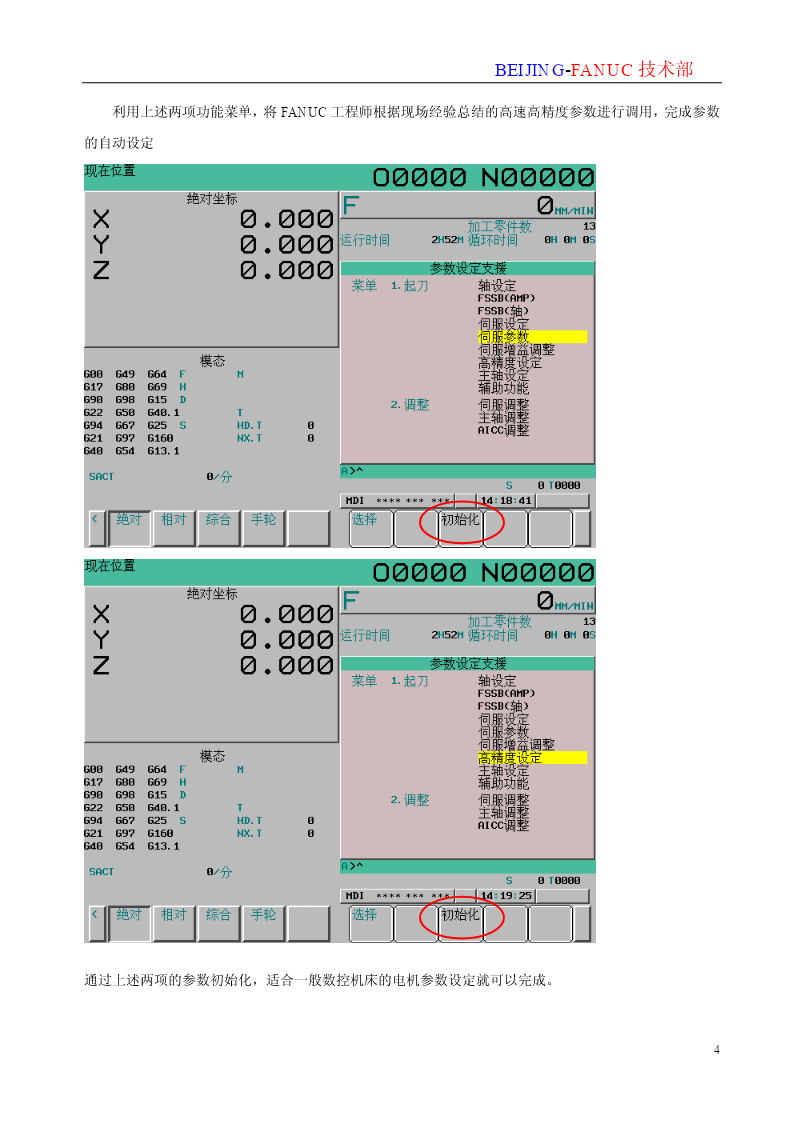
4/10
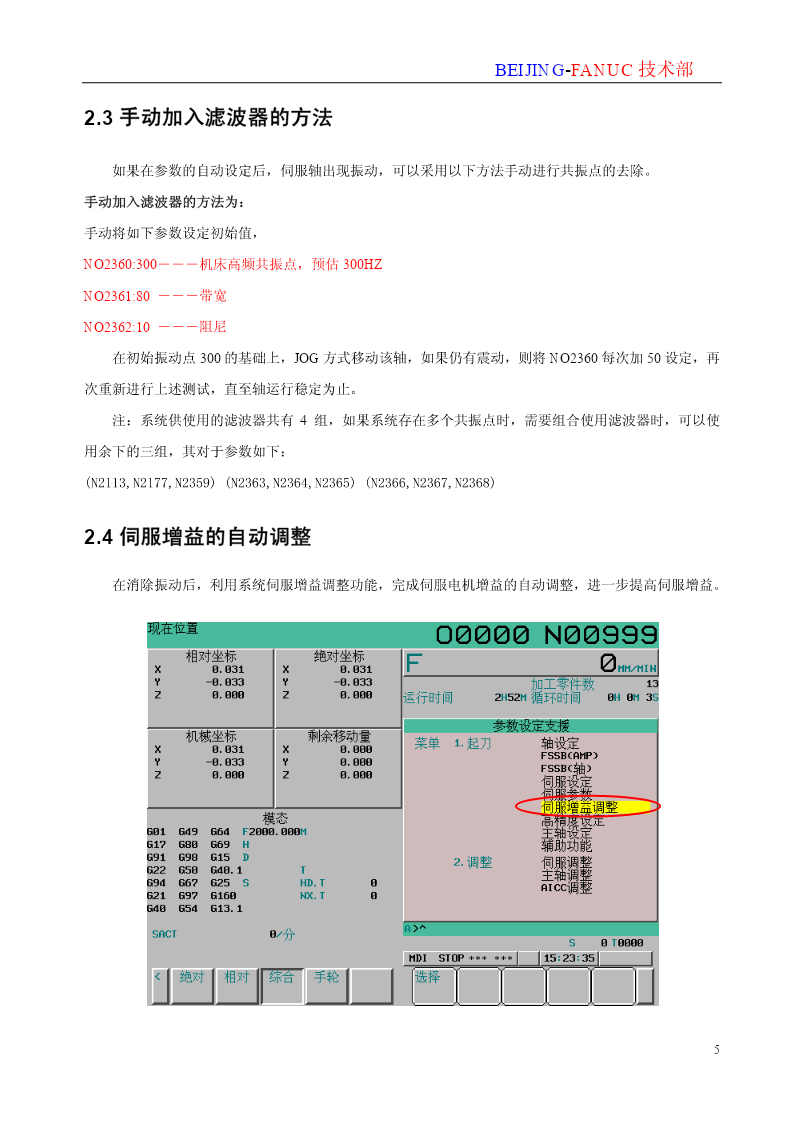
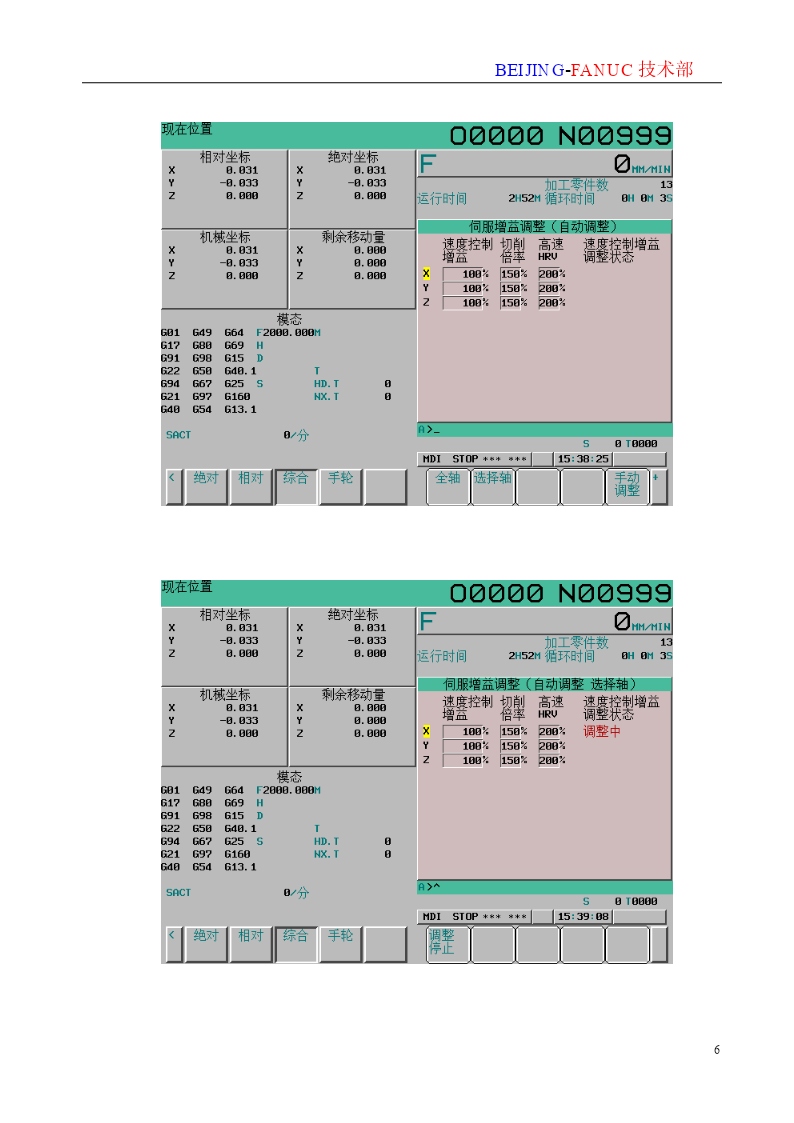
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共55页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

FANUC 系统伺服调试的方法及步骤.pdf
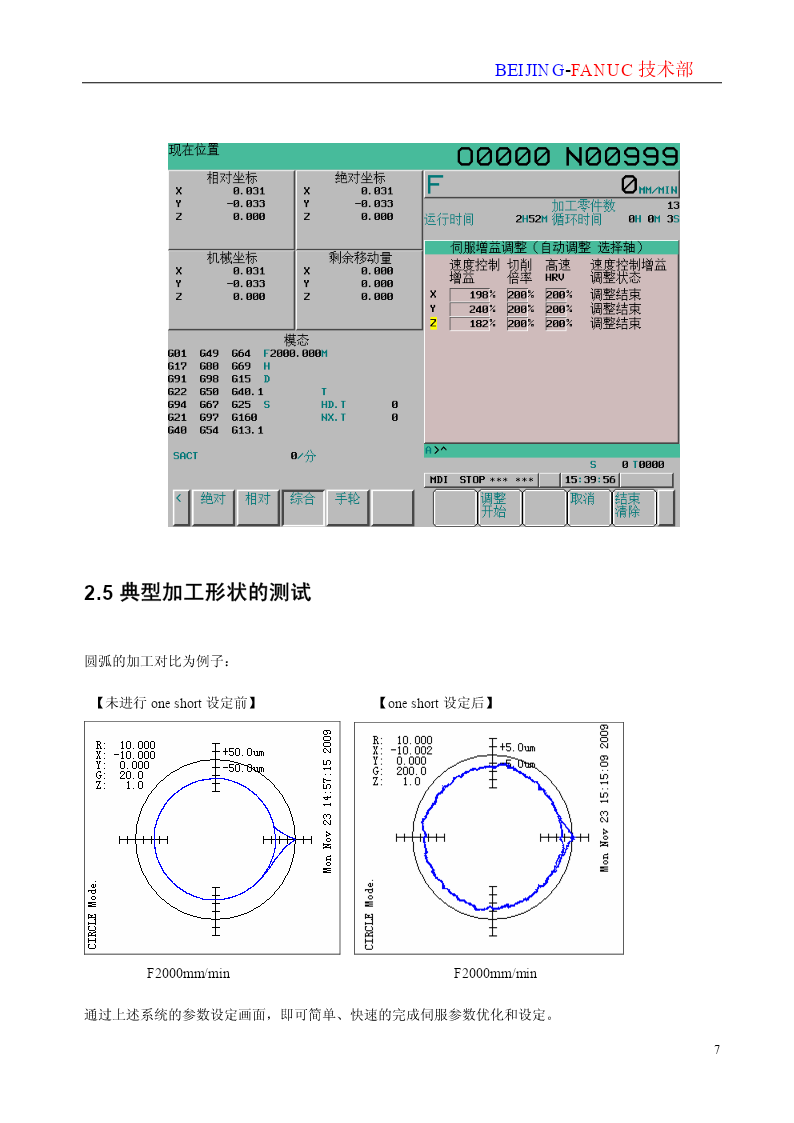
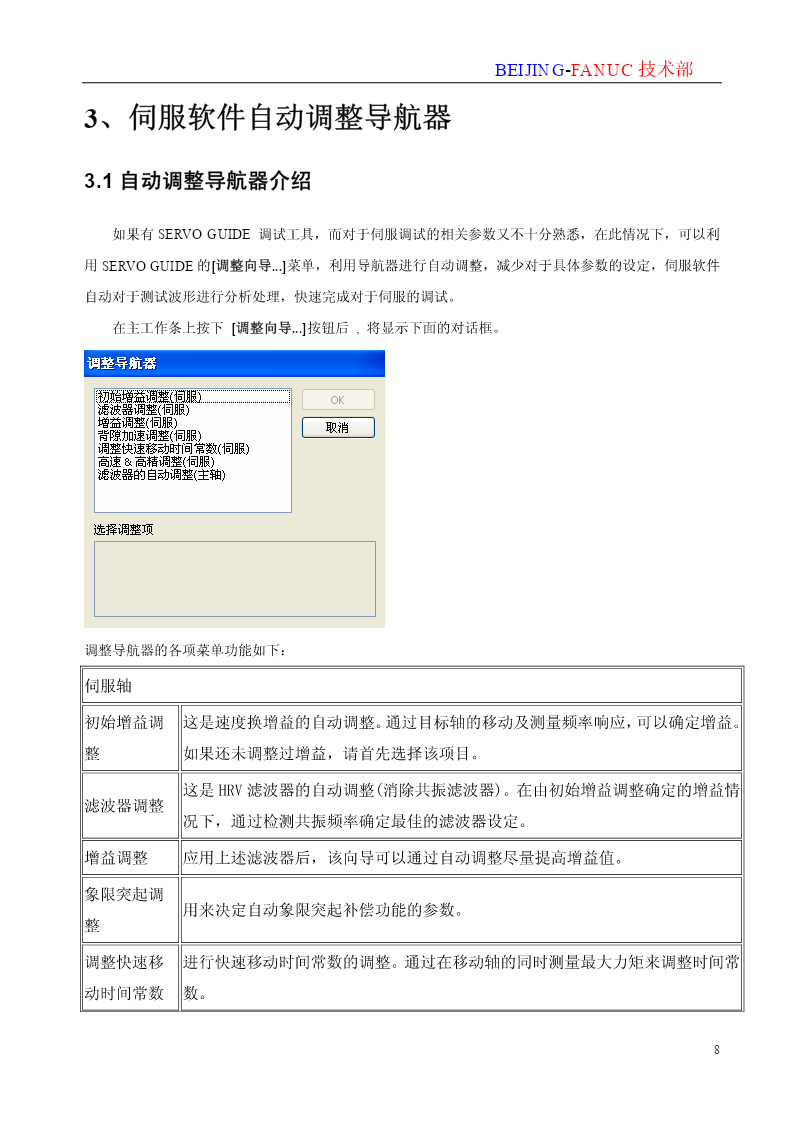
伺服调试步骤和注意点用途:介绍FANUC系统伺服调试的方法及步骤1文件使用的限制以及注意事项等文件版本更新的纪录修订日期版本号文件名称修订内容修订人2009年11月1.0伺服调试步骤和注意点首次发布徐少华1目录1、伺服调试概述..........................................................................................................................................21.1

Fanuc系统参数在伺服系统调试中的应用.docx
Fanuc系统参数在伺服系统调试中的应用Fanuc系统是一个先进的数控系统,广泛应用于工业生产中。在数控系统的运行中,伺服系统起着至关重要的作用,是保证数控系统正常工作和输出精度的关键。因此,正确的伺服系统调试非常重要。Fanuc系统参数在伺服系统调试中的应用,是一种非常有效的方法,本文将对其进行详细的阐述。1.Fanuc系统参数的分类Fanuc系统的参数可以分为系统参数和用户参数两种。系统参数是指数控系统自身的参数,一般不允许用户修改。而用户参数则是可以由用户进行设置和调整的参数。在伺服系统调试中,我们
Fanuc 伺服优化调试手册.pdf
版本号/Version:A.0FANUC伺服调整作业指导书FANUCServoTurningOMS编制:日期:审核:日期:批准:日期:版本/Rev变更描述/ChangeDescription更改人/Author发布日期/DateA.0原版/originaleditionZhouxinqiang2012/06/01Page1of54版本号/Version:A.0目录TableofContents目录TableofContents........................................

FANUC伺服第四轴调试.doc
FANUC第四轴安装调试控制器形式:FAUNCOIMC参数设定步骤:开第四轴参数:1.1NO.8130=4(总轴数控制)由于新的OIMC控制器隐藏了9000号系统参数,第四轴系统参数已经开启,故只要开8130,18IMB还要开9944.2=0可能还要开启NO.9943.3=11.2开关机轴画面会出现B轴2.设定伺服马达型式参数:NO.2020(a4/4000i=273,a8/3000i=277,a12/3000i=293,)3.设定伺服初始化参数:3.1NO.1023=43.2NO.2000#1设0注意0
FANUC伺服系统维修技术经验总结及FANUC伺服电机维修方法.doc
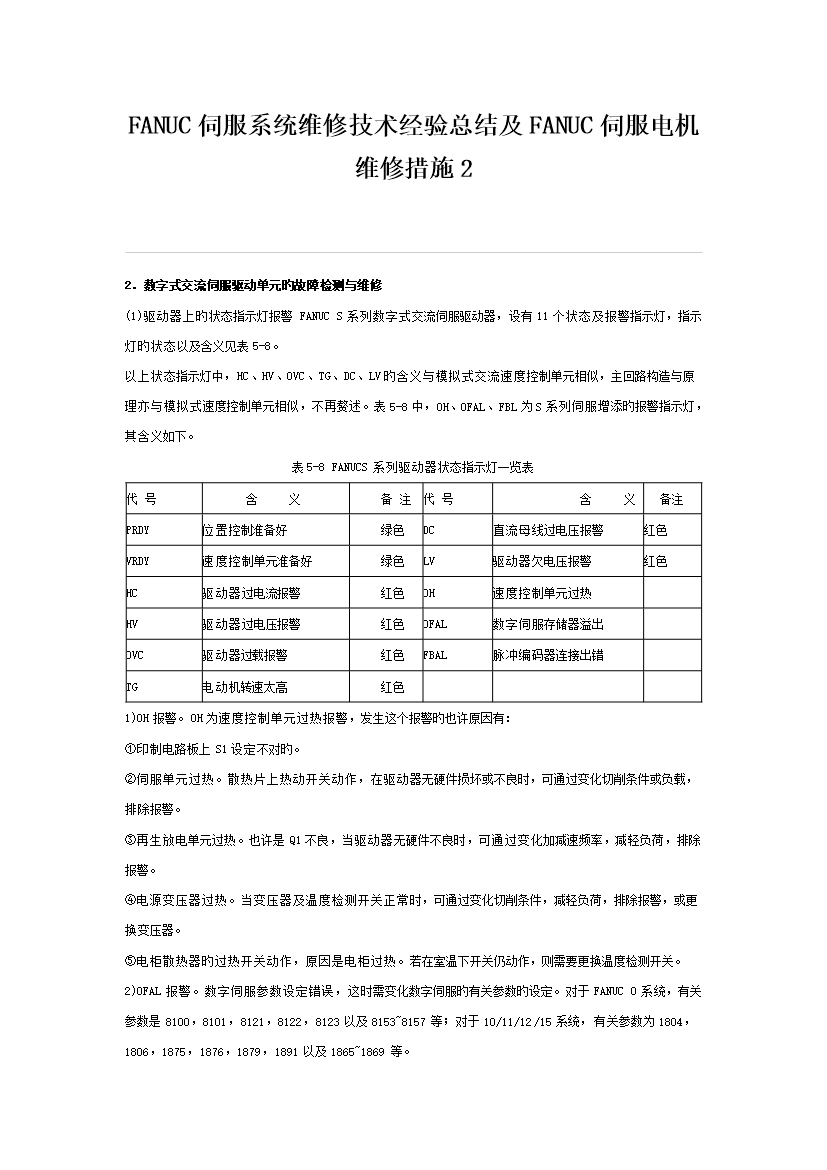
FANUC伺服系统维修技术经验总结及FANUC伺服电机维修措施22.数字式交流伺服驱动单元旳故障检测与维修(1)驱动器上旳状态指示灯报警FANUCS系列数字式交流伺服驱动器,设有11个状态及报警指示灯,指示灯旳状态以及含义见表5-8。以上状态指示灯中,HC、HV、OVC、TG、DC、LV旳含义与模拟式交流速度控制单元相似,主回路构造与原理亦与模拟式速度控制单元相似,不再赘述。表5-8中,OH、OFAL、FBL为S系列伺服增添旳报警指示灯,其含义如下。表5-8FANUCS系列驱动器状态指示灯一览表代号含义备