
Simulink在液压控制系统仿真中的应用.doc

qw****27


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

Simulink在液压控制系统仿真中的应用.doc
Simulink在液压控制系统仿真中的应用1简介液压控制系统的动态响应仿真计算一直是液压行业不断研究的一个门类,在液压控制系统中有着广泛的应用。由于液压动力机构是动态元件,其动态特性很大程度上决定着整个液压伺服系统的性能,其中四通阀控液压缸是最常见的动力机构,也是泵控系统中伺服变量泵的前置级。以前一般采用个人编程的方法来实现系统的动态响应,但是往往要花费大量的时间来处理程序本身的问题,并且容易出错、通用性差。SIMULINK的问世给液压系统的动态仿真计算提供了强大的工具,在SIMULINK环境中只需利用鼠
SIMULINK在液压系统仿真中的应用_侯友夫.pdf
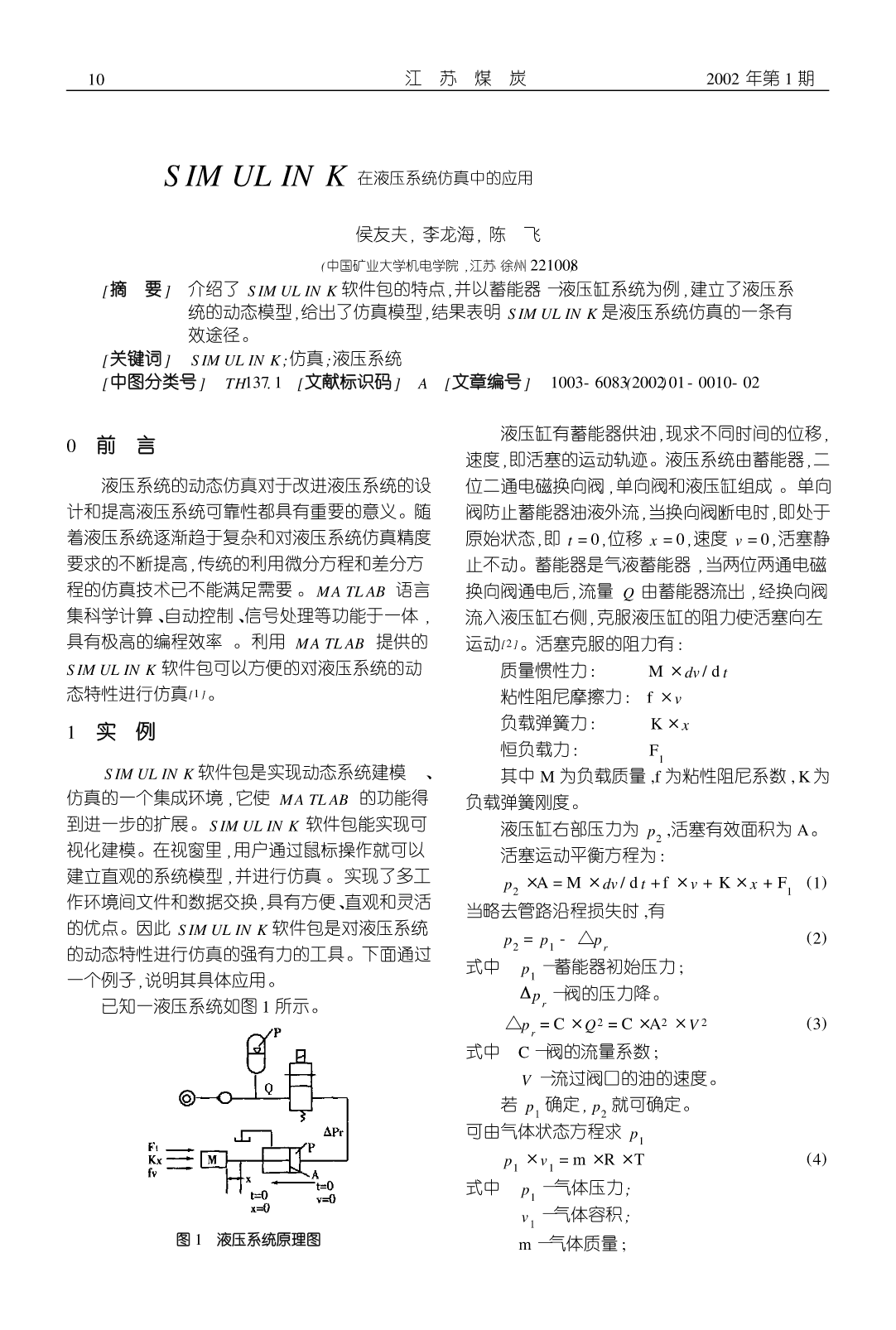
10江苏煤炭2002年第1期SIMULINK在液压系统仿真中的应用侯友夫,李龙海,陈飞(中国矿业大学机电学院,江苏徐州221008)[摘要]介绍了SIMULINK软件包的特点,并以蓄能器—液压缸系统为例,建立了液压系统的动态模型,给出了仿真模型,结果表明SIMULINK是液压系统仿真的一条有效途径。[关键词]SIMULINK;仿真;液压系统[中图分类号]TH137.1[文献标识码]A[文章编号]1003-6083(2002)01-0010-02液压缸有蓄能器供油,现求不同时间的位移,0前言速度,即活塞的运
simulink在系统仿真中的应用课件.ppt
第5章Simulink在系统仿真中的应用主要内容5.1Simulink建模的基础知识5.1.1Simulink简介MATLAB的一个组成部分1990年前后由MathWorks公司推出SimuLAB1992年改为simulinkSimu(仿真)+link(连接)2007年,支持simscape语言simulink强大的功能Simulink可以搭建:单击MATLAB命令窗口工具栏中的Simulink图标,可以打开Simulink模块浏览器窗口。输入open_system(‘simulink’)命令将打开模型库

Simulink在电路系统仿真中的应用.docx
课程论文首页院、系(部)电子信息工程系专业电子信息工程班级092学号910706201姓名XXX任课教师XXX课程名称计算机仿真技术论文题目Simulink在电路系统仿真中的应用成绩评语签字:年月日复核人意见签字:年月日Simulink在电路系统仿真中的应用XXX摘要:运用Matlab提供的可视化仿真环境Simulink设计模块图的方法,通过建立电路的仿真模型来直观地观察电路中的电流、电压和功率的波形。关键字:MatlabSimulink电路仿真1背景简介电路理论中,对电路的分析计算提出了各种方法。但要用
第5章simulink在系统仿真中的应用2010.ppt
第5章Simulink在系统仿真中的应用5.1SIMULINK建模的基础知识1.SIMULINK的启动在MATLAB命令窗口中输入simulink3结果是在桌面上出现一个用图标形式显示的Library:simulink3的Simulink模块库窗口。两种模块库窗口界面只是不同的显示形式,用户可以根据各人喜好进行选用,一般说来第二种窗口直观、形象,易于初学者,但使用时会打开太多的子窗口。2.模型的建立在MATLAB主窗口File菜单中选择New菜单项下的Model命令,在出现Simulink模块库浏览器的同