
漂浮式双叶轮风电机组转速与浮台运动控制的解耦方法.pdf

Jo****34

1/7
2/7
3/7
4/7

5/7
6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
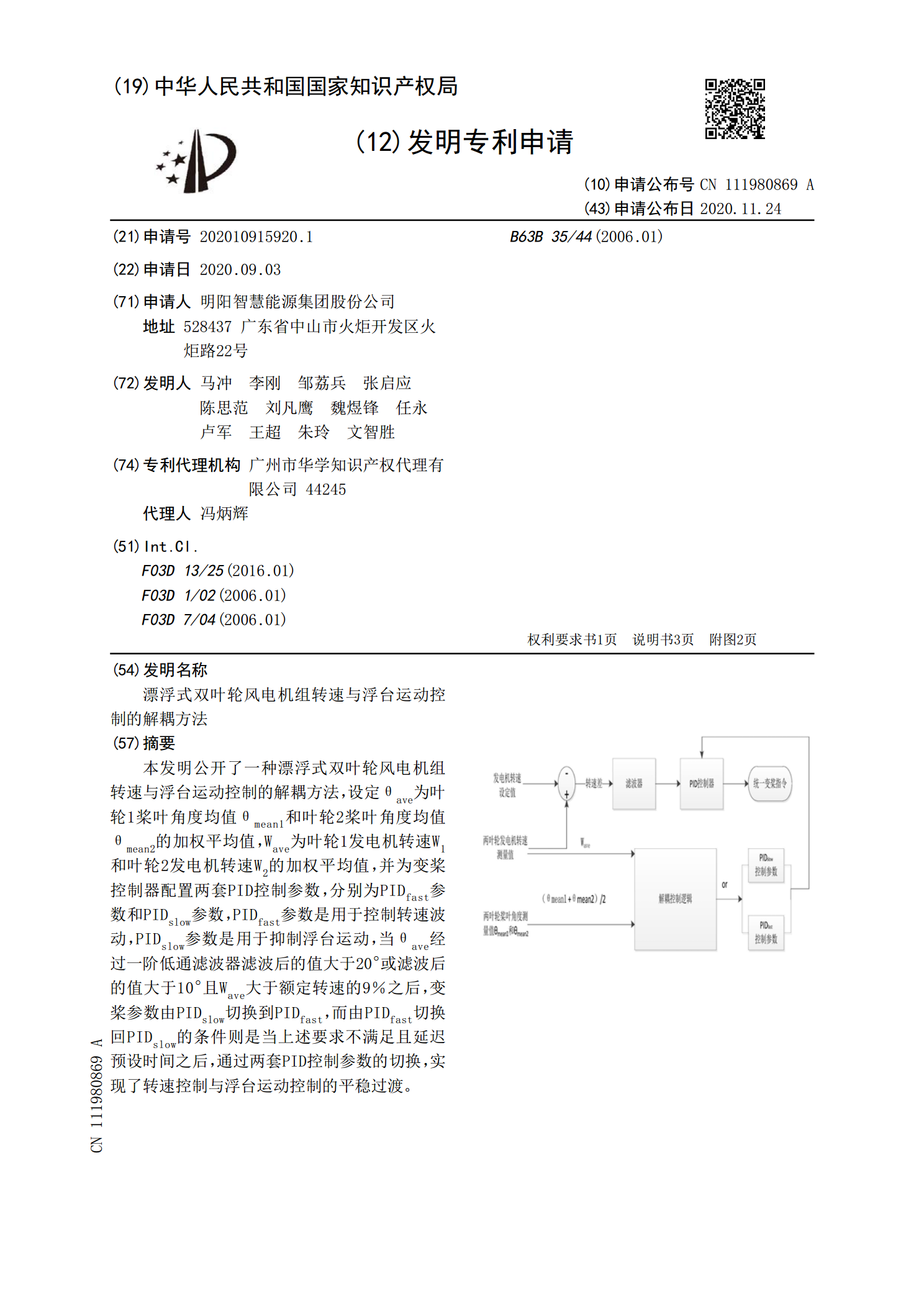
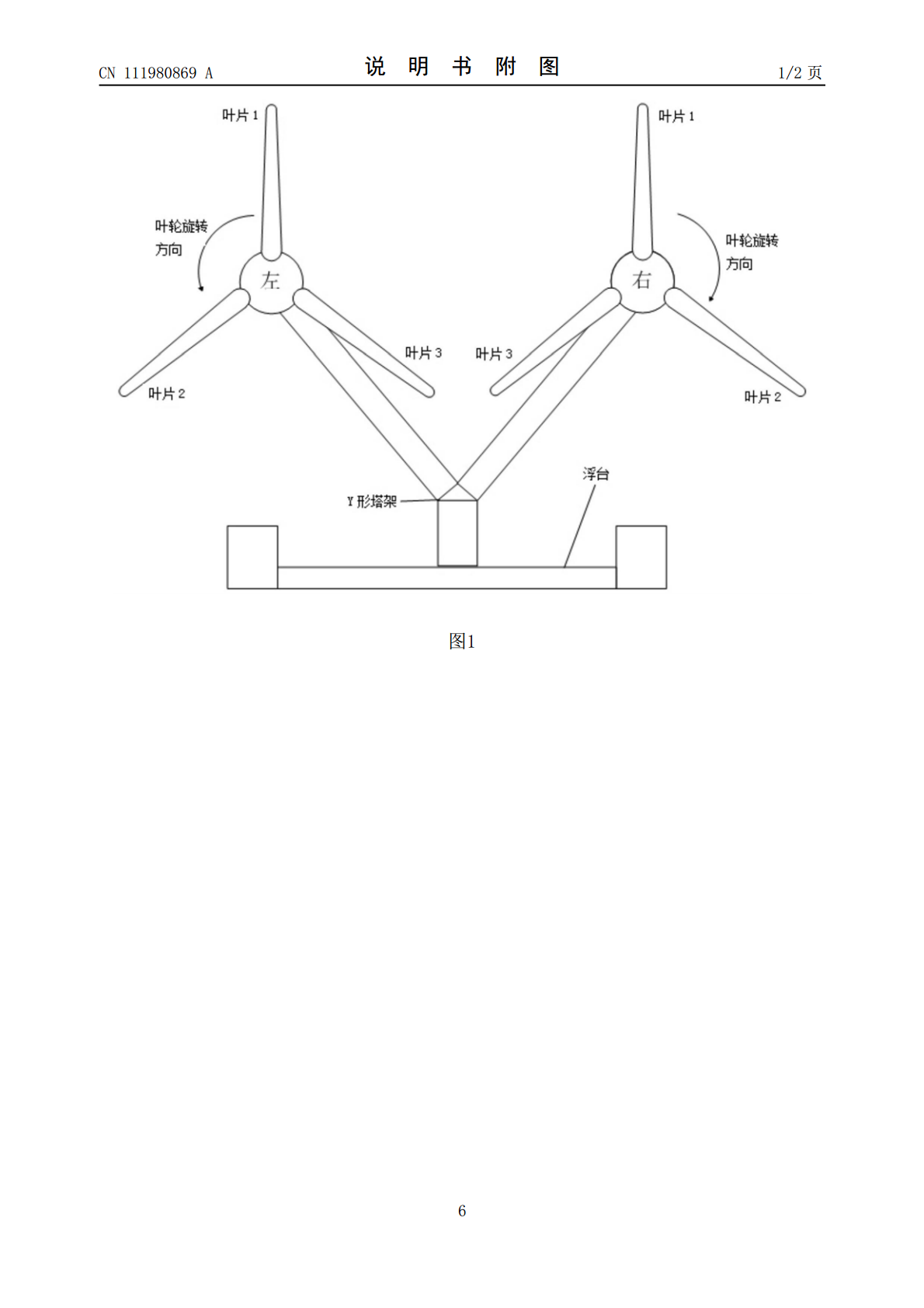
漂浮式双叶轮风电机组转速与浮台运动控制的解耦方法.pdf
本发明公开了一种漂浮式双叶轮风电机组转速与浮台运动控制的解耦方法,设定θ
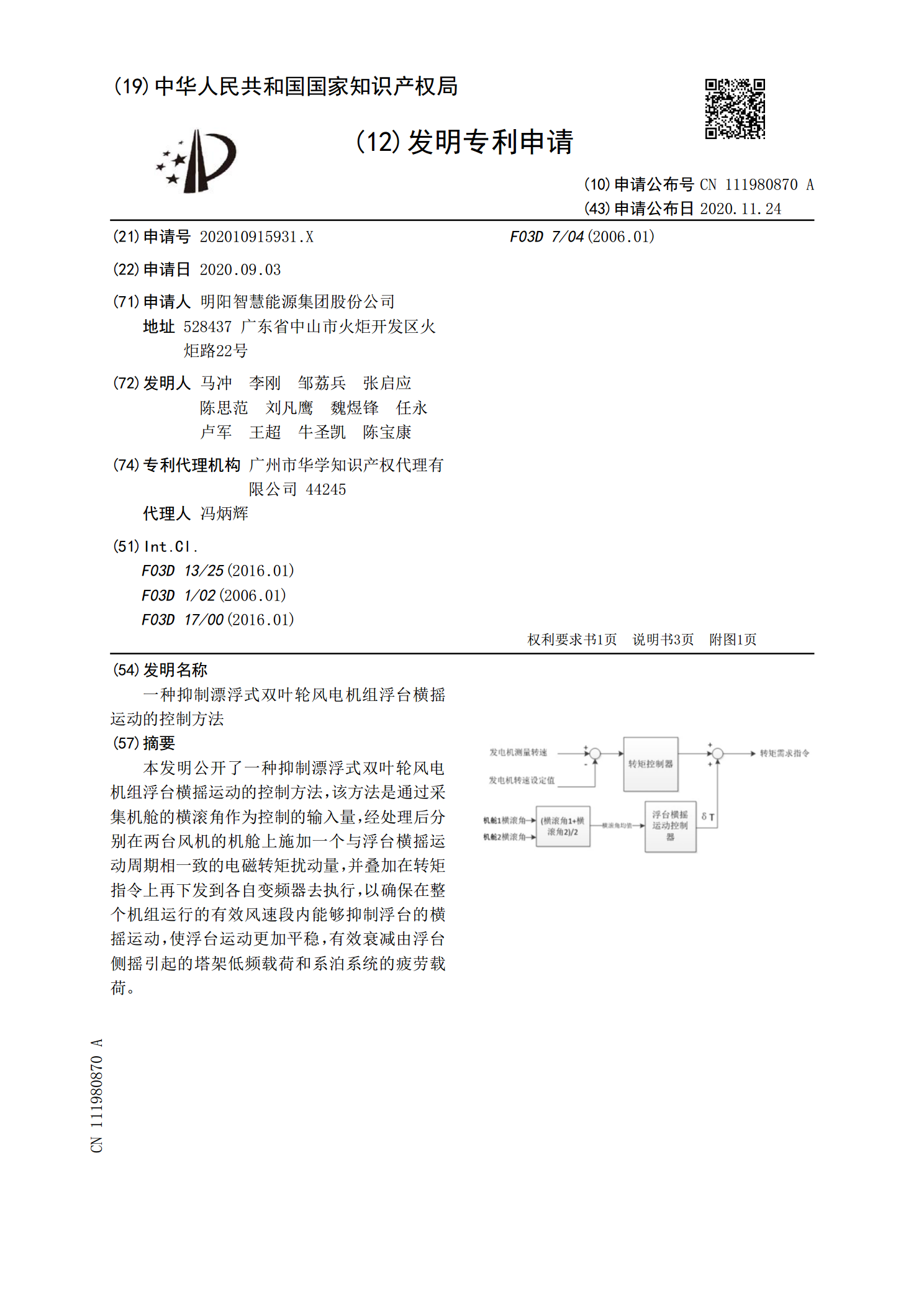
一种抑制漂浮式双叶轮风电机组浮台横摇运动的控制方法.pdf
本发明公开了一种抑制漂浮式双叶轮风电机组浮台横摇运动的控制方法,该方法是通过采集机舱的横滚角作为控制的输入量,经处理后分别在两台风机的机舱上施加一个与浮台横摇运动周期相一致的电磁转矩扰动量,并叠加在转矩指令上再下发到各自变频器去执行,以确保在整个机组运行的有效风速段内能够抑制浮台的横摇运动,使浮台运动更加平稳,有效衰减由浮台侧摇引起的塔架低频载荷和系泊系统的疲劳载荷。
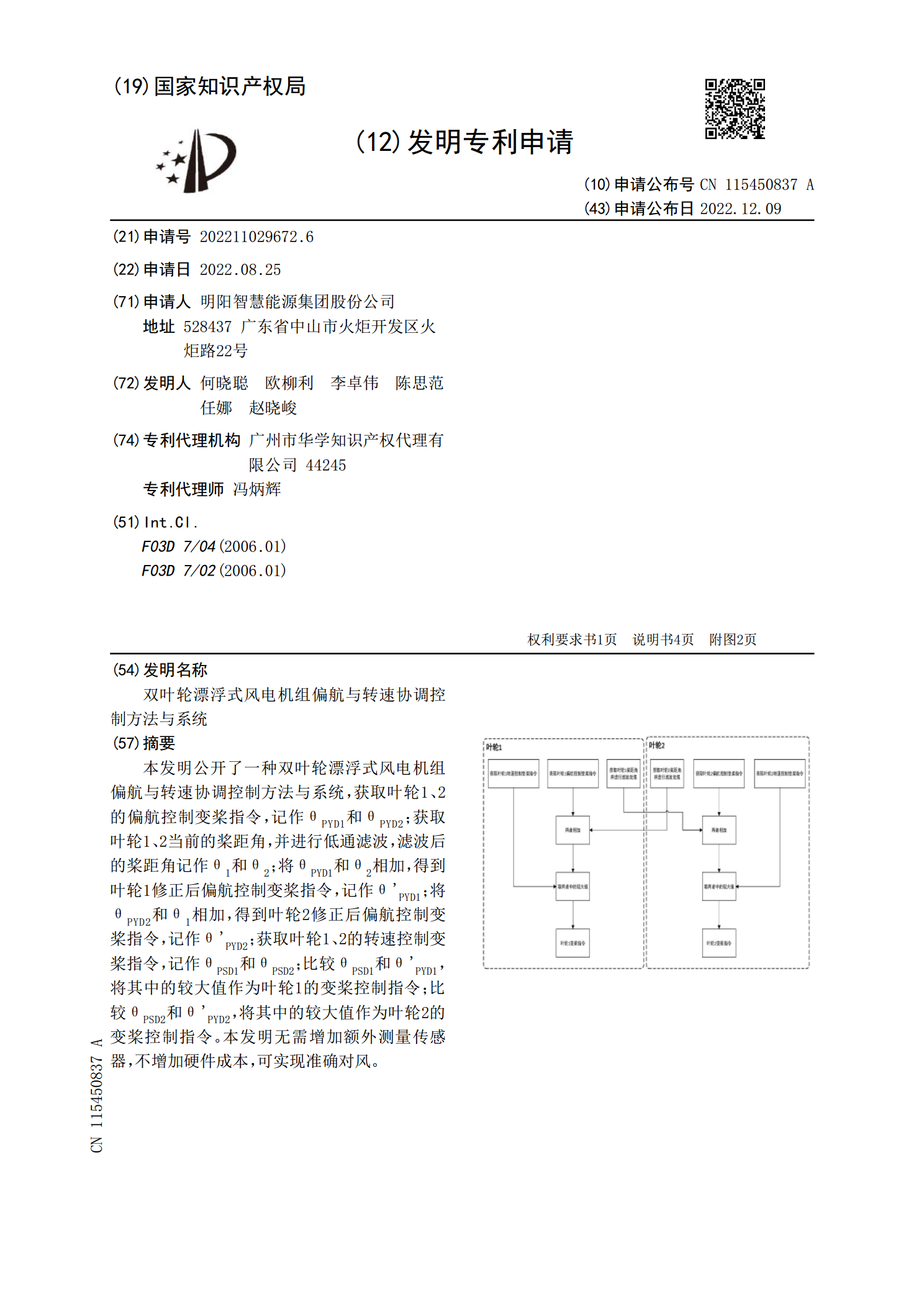
双叶轮漂浮式风电机组偏航与转速协调控制方法与系统.pdf
本发明公开了一种双叶轮漂浮式风电机组偏航与转速协调控制方法与系统,获取叶轮1、2的偏航控制变桨指令,记作θ<base:Sub>PYD1</base:Sub>和θ<base:Sub>PYD2</base:Sub>;获取叶轮1、2当前的桨距角,并进行低通滤波,滤波后的桨距角记作θ<base:Sub>1</base:Sub>和θ<base:Sub>2</base:Sub>;将θ<base:Sub>PYD1</base:Sub>和θ<base:Sub>2</base:Sub>相加,得到叶轮1修正后偏航控制变桨指令
一种抑制漂浮式双叶轮风电机组基础平台俯仰运动的方法.pdf
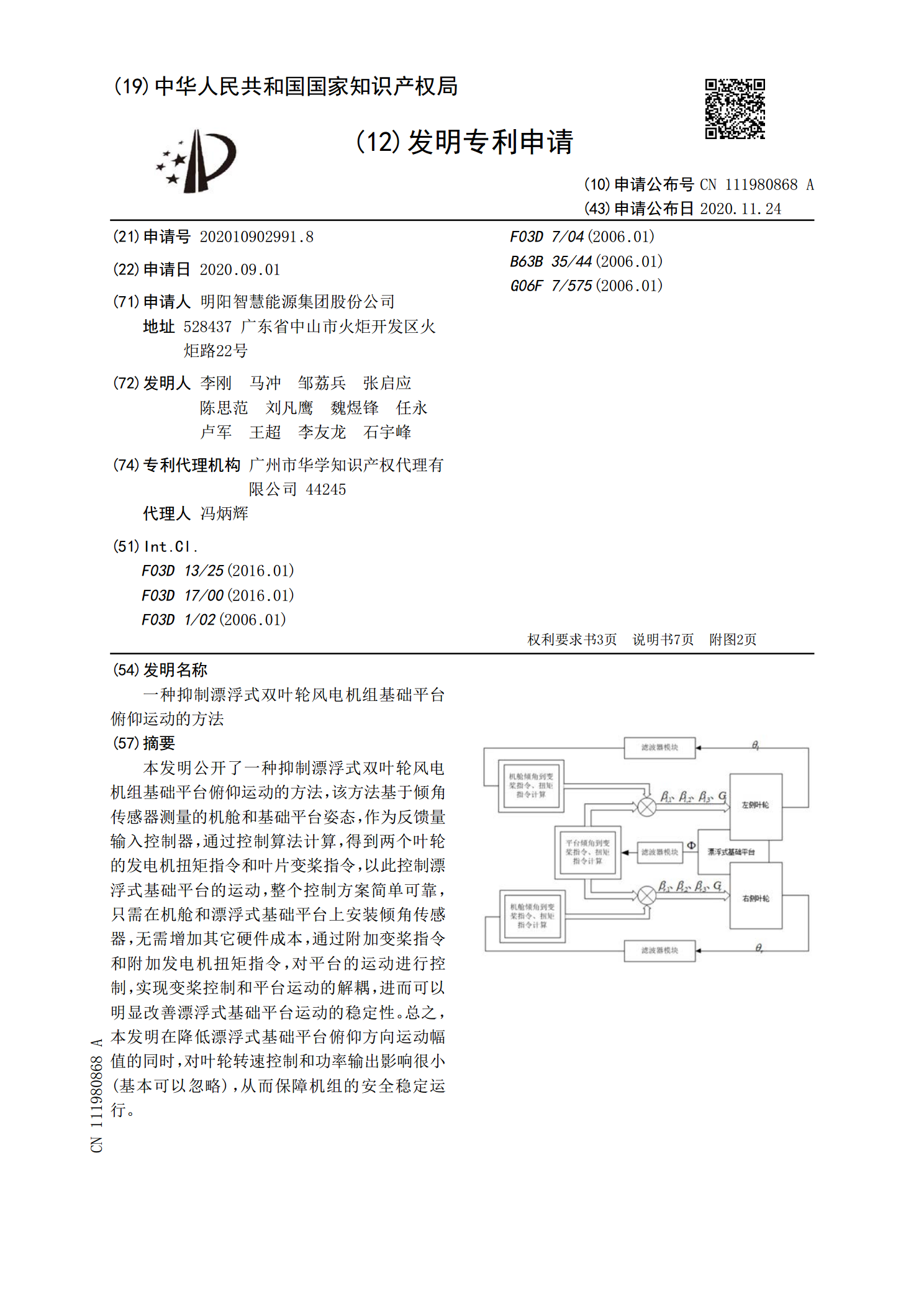
本发明公开了一种抑制漂浮式双叶轮风电机组基础平台俯仰运动的方法,该方法基于倾角传感器测量的机舱和基础平台姿态,作为反馈量输入控制器,通过控制算法计算,得到两个叶轮的发电机扭矩指令和叶片变桨指令,以此控制漂浮式基础平台的运动,整个控制方案简单可靠,只需在机舱和漂浮式基础平台上安装倾角传感器,无需增加其它硬件成本,通过附加变桨指令和附加发电机扭矩指令,对平台的运动进行控制,实现变桨控制和平台运动的解耦,进而可以明显改善漂浮式基础平台运动的稳定性。总之,本发明在降低漂浮式基础平台俯仰方向运动幅值的同时,对叶轮转

海上双风轮漂浮式风电机组的停机协同控制方法与系统.pdf
本发明公开了一种海上双风轮漂浮式风电机组的停机协同控制方法与系统,包括:当任意一个风轮进入停机逻辑,则触发另外一个风轮同步进入相同的停机逻辑;两个风轮在停机过程中,一个风轮的平均变桨角度大于另外风轮平均变桨角度,通过修正某一个风轮的停机变桨速率,使两个风轮的平均变桨角度达到同步;两个风轮在停机过程中,一个风轮的转速大于另外风轮转速,通过修正某一个风轮的停机发电机扭矩指令,使两个风轮的转速达到同步。本发明在一个风轮进入停机逻辑时,触发另外风轮进入相同停机逻辑,并通过调整停机变桨速率以及发电机扭矩指令方式,使