
一种蠕动式城市管道清淤机器人.pdf

是浩****32


1/8
2/8
3/8
4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

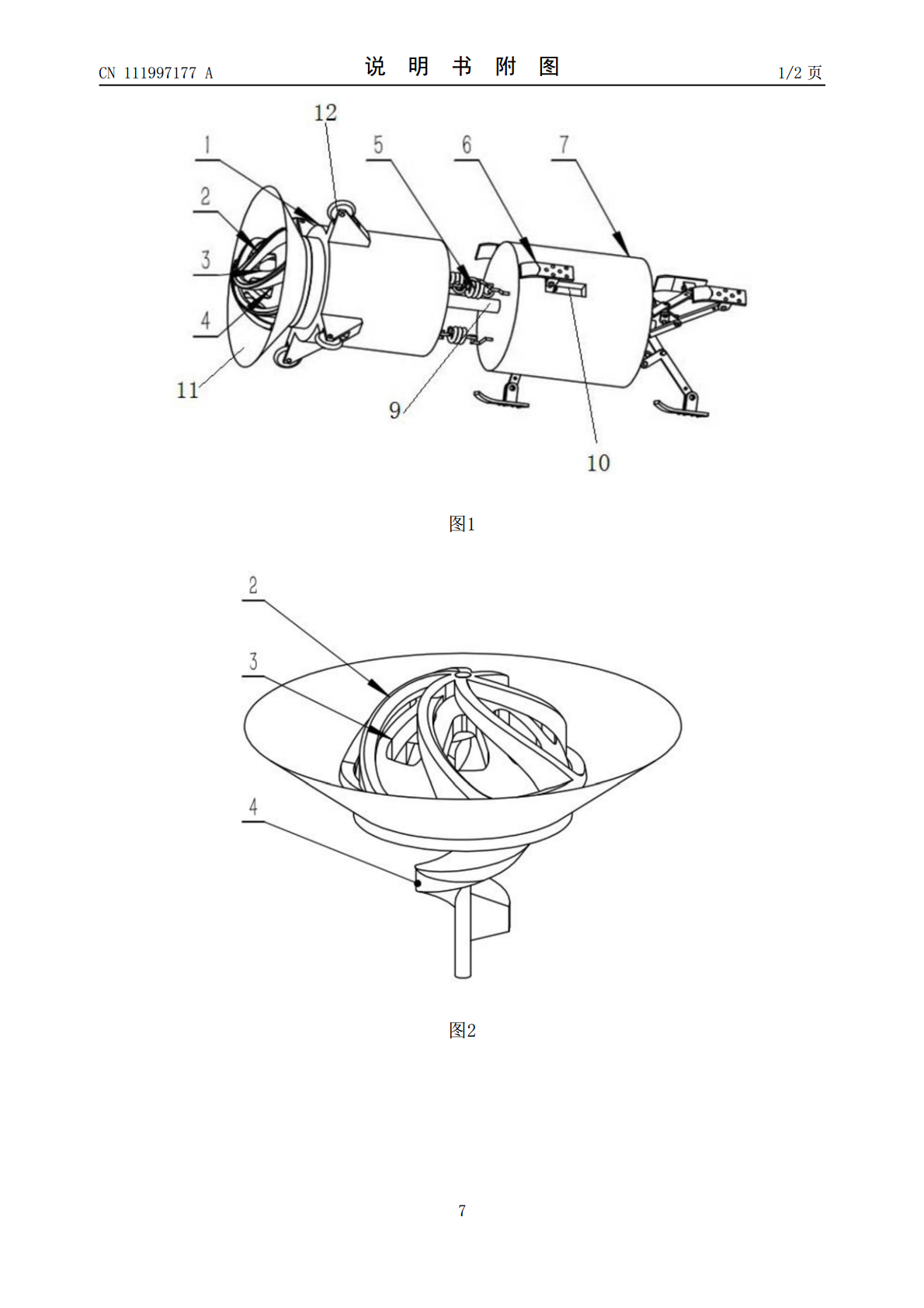
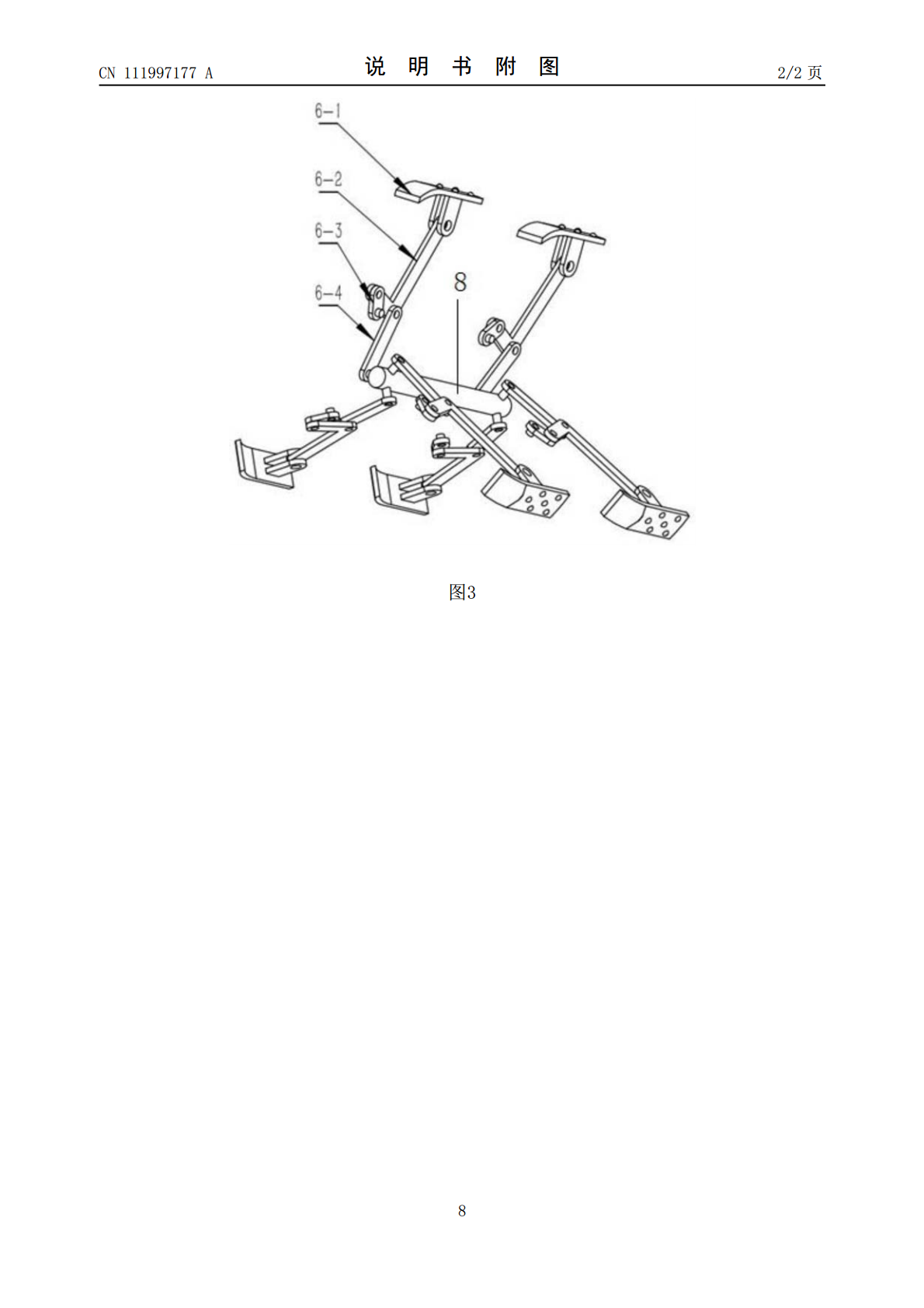
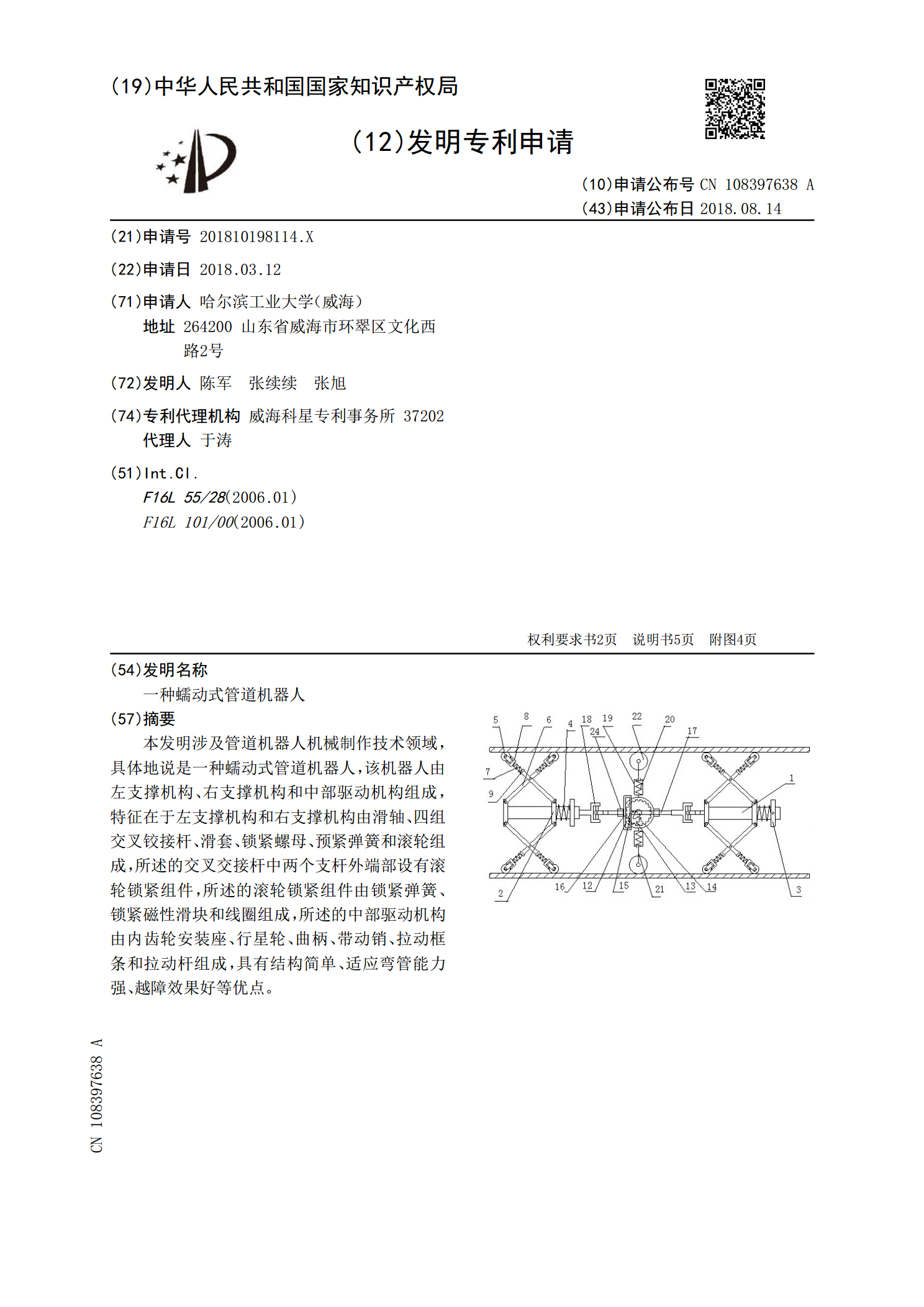
一种蠕动式城市管道清淤机器人.pdf
本发明公开了一种蠕动式城市管道清淤机器人,采用分段式结构,包括铰刀舱和行走舱,且铰刀舱和行走舱之间通过若干组拉伸弹簧连接,其中,所述铰刀舱包括传送轴、铰刀舱外壳、铰刀舱内腔、若干导向轮、内铰刀、外铰刀和第一电机,所述行走舱包括行走舱外壳、行走机构和固定杆。本发明通过行走机构、内铰刀和外铰刀的协同作用,达到了能够持续进行管道清淤工作的目的,通过伞状遮挡圈的收集以及内外铰刀的破碎收集作用,能够应付管道内的复杂环境,又由于蠕动式机器人的填充式的行走方式,保证了其清淤效果,提高了清淤效率,降低了疏浚能耗,最终达到
一种蠕动式管道机器人.pdf
本发明涉及管道机器人机械制作技术领域,具体地说是一种蠕动式管道机器人,该机器人由左支撑机构、右支撑机构和中部驱动机构组成,特征在于左支撑机构和右支撑机构由滑轴、四组交叉铰接杆、滑套、锁紧螺母、预紧弹簧和滚轮组成,所述的交叉交接杆中两个支杆外端部设有滚轮锁紧组件,所述的滚轮锁紧组件由锁紧弹簧、锁紧磁性滑块和线圈组成,所述的中部驱动机构由内齿轮安装座、行星轮、曲柄、带动销、拉动框条和拉动杆组成,具有结构简单、适应弯管能力强、越障效果好等优点。
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道
一种蠕动式管道行走机器人.pdf
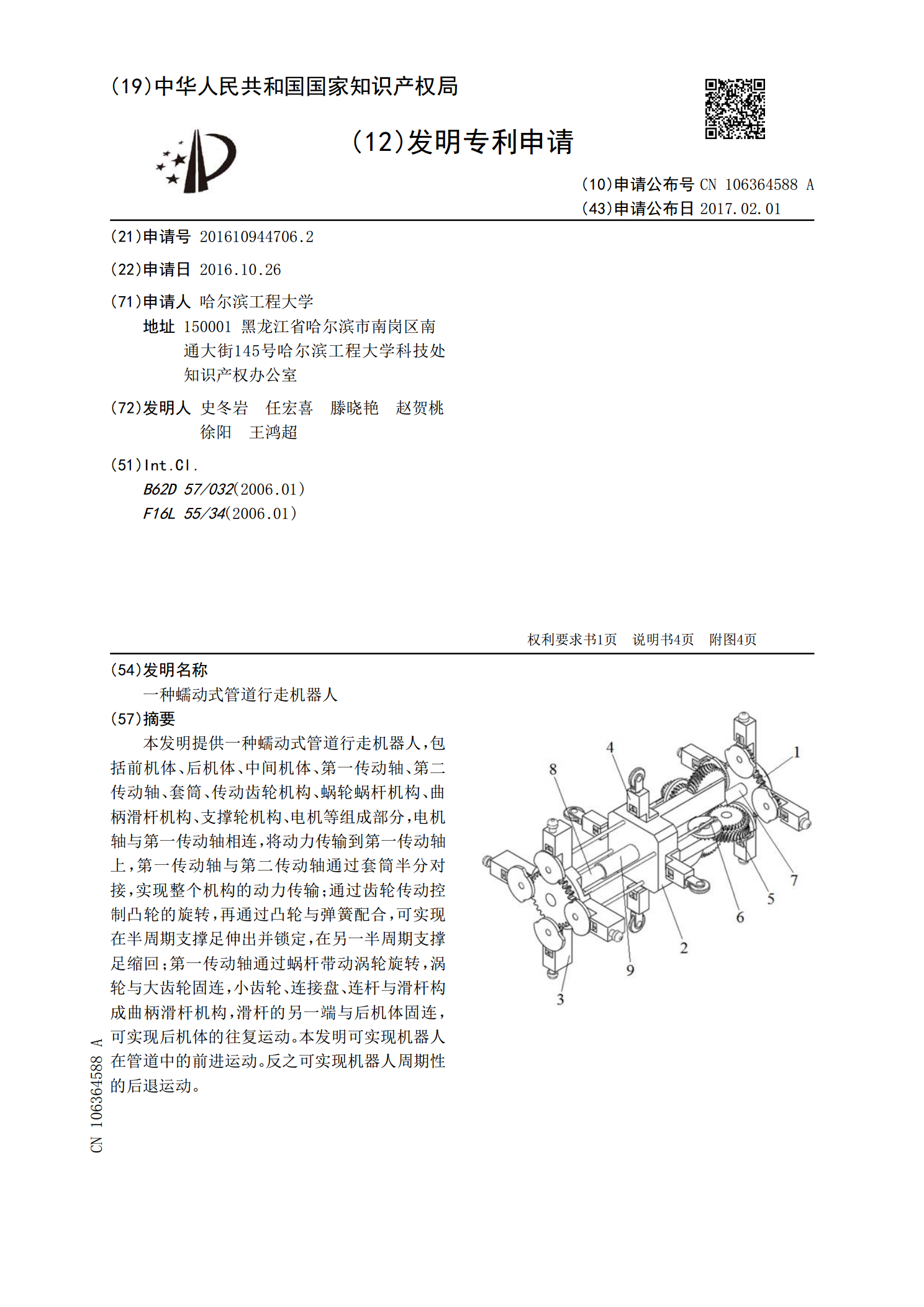
本发明提供一种蠕动式管道行走机器人,包括前机体、后机体、中间机体、第一传动轴、第二传动轴、套筒、传动齿轮机构、蜗轮蜗杆机构、曲柄滑杆机构、支撑轮机构、电机等组成部分,电机轴与第一传动轴相连,将动力传输到第一传动轴上,第一传动轴与第二传动轴通过套筒半分对接,实现整个机构的动力传输;通过齿轮传动控制凸轮的旋转,再通过凸轮与弹簧配合,可实现在半周期支撑足伸出并锁定,在另一半周期支撑足缩回;第一传动轴通过蜗杆带动涡轮旋转,涡轮与大齿轮固连,小齿轮、连接盘、连杆与滑杆构成曲柄滑杆机构,滑杆的另一端与后机体固连,可实

全驱蠕动式管道机器人.pdf
本发明的全驱蠕动式管道机器人包括单元节和连接单元节的万向节,单元节包括安装架、轮腿组件、锁止组件和传动组件,轮腿组件、锁止组件和传动组件安装于安装架上,其中轮腿组件用于支撑机器人在管道内壁行走,锁止组件用于锁定单元节,传动组件用于根据电机驱动带动锁止组件动作和单元节相对运动。有益效果在于:单元节中采用的具有内外螺纹的螺管和传动丝杆与锁紧架配合,通过电机驱动其正反转,实现了前后单元节交替锁止。并使机器人产生伸缩前进或后退运动。本发明采用单电机驱动方式,有效的减少了动力源,缩小了机器人体积,减小了能耗,使之更