
一种能够爬楼梯的运输装置及其爬楼梯的方法.pdf

一条****杉淑

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种能够爬楼梯的运输装置及其爬楼梯的方法.pdf
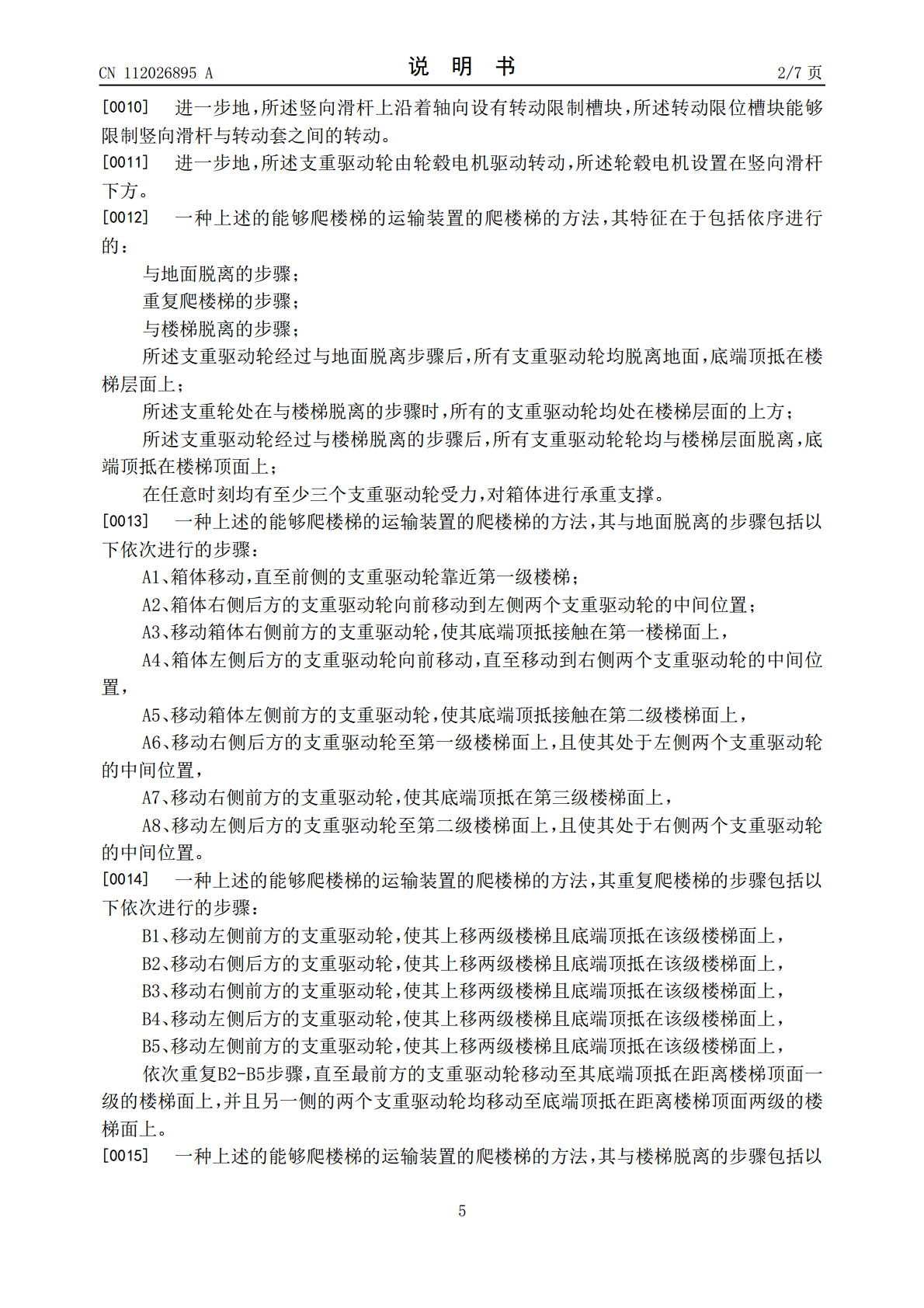
本发明公开了一种能够爬楼梯的运输装置,其其包括箱体以及设置在箱体上的多个升降万向驱动装置,所述升降万向驱动装置与箱体水平滑动连接,所述升降万向驱动装置包括安装座以及能够竖向升降且水平转动的支重驱动轮;本发明提供了一种能够爬楼梯的运输装置及其爬楼梯的方法,能够替代人力进行爬升楼梯,提高了物流运输效率,节省了人力成本,改善了用户体验。
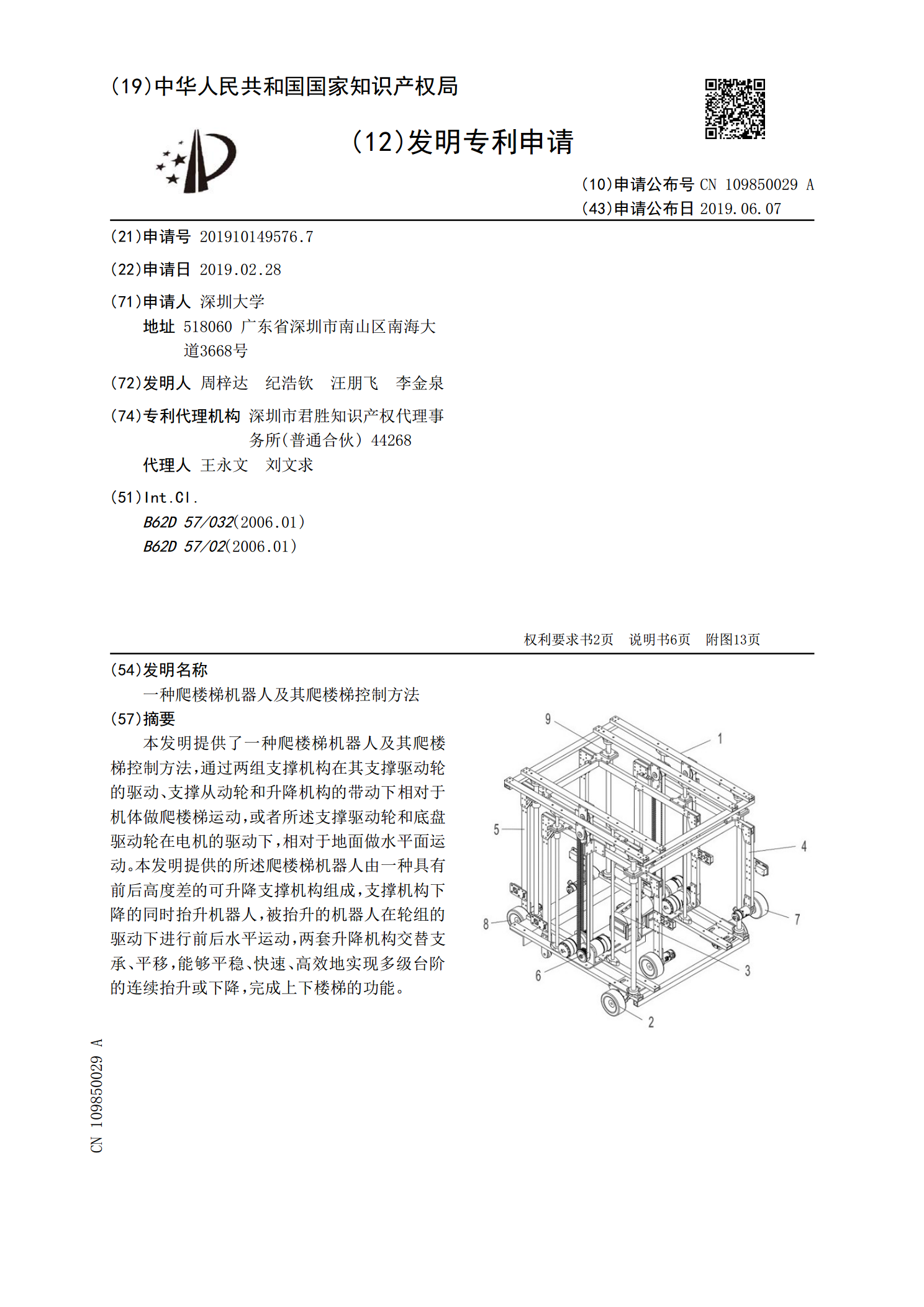
一种爬楼梯机器人及其爬楼梯控制方法.pdf
本发明提供了一种爬楼梯机器人及其爬楼梯控制方法,通过两组支撑机构在其支撑驱动轮的驱动、支撑从动轮和升降机构的带动下相对于机体做爬楼梯运动,或者所述支撑驱动轮和底盘驱动轮在电机的驱动下,相对于地面做水平面运动。本发明提供的所述爬楼梯机器人由一种具有前后高度差的可升降支撑机构组成,支撑机构下降的同时抬升机器人,被抬升的机器人在轮组的驱动下进行前后水平运动,两套升降机构交替支承、平移,能够平稳、快速、高效地实现多级台阶的连续抬升或下降,完成上下楼梯的功能。
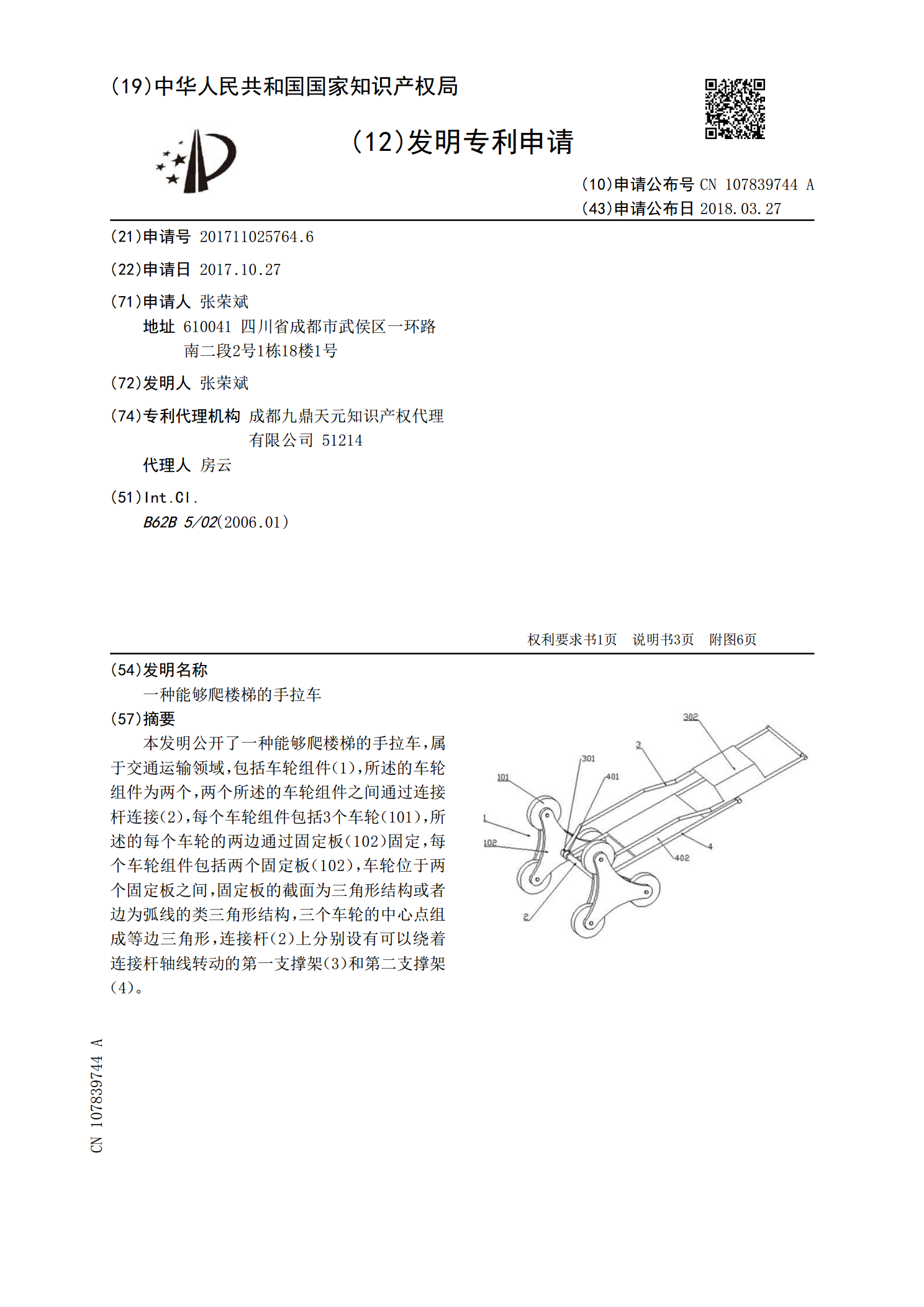
一种能够爬楼梯的手拉车.pdf
本发明公开了一种能够爬楼梯的手拉车,属于交通运输领域,包括车轮组件(1),所述的车轮组件为两个,两个所述的车轮组件之间通过连接杆连接(2),每个车轮组件包括3个车轮(101),所述的每个车轮的两边通过固定板(102)固定,每个车轮组件包括两个固定板(102),车轮位于两个固定板之间,固定板的截面为三角形结构或者边为弧线的类三角形结构,三个车轮的中心点组成等边三角形,连接杆(2)上分别设有可以绕着连接杆轴线转动的第一支撑架(3)和第二支撑架(4)。
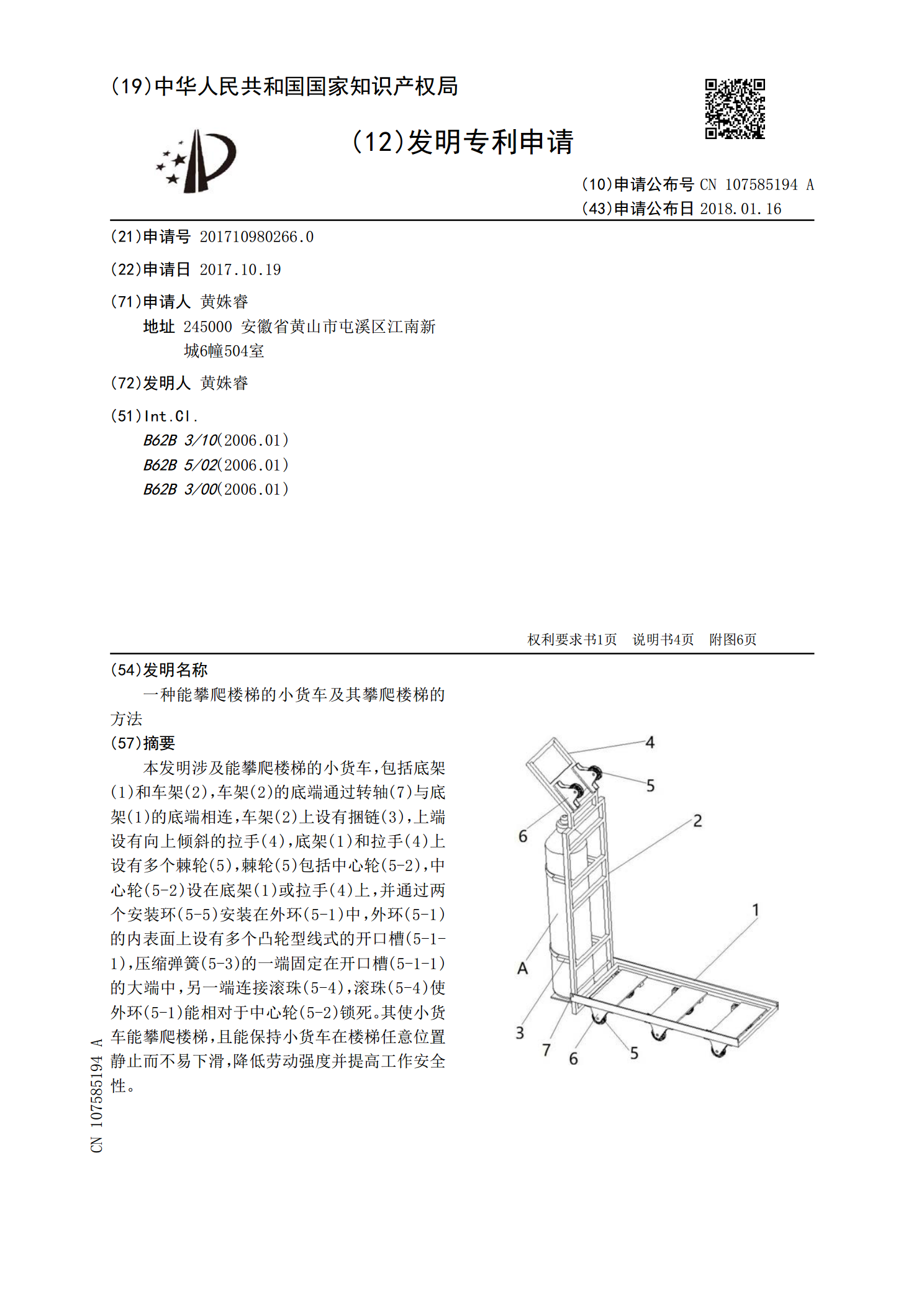
一种能攀爬楼梯的小货车及其攀爬楼梯的方法.pdf
本发明涉及能攀爬楼梯的小货车,包括底架(1)和车架(2),车架(2)的底端通过转轴(7)与底架(1)的底端相连,车架(2)上设有捆链(3),上端设有向上倾斜的拉手(4),底架(1)和拉手(4)上设有多个棘轮(5),棘轮(5)包括中心轮(5‑2),中心轮(5‑2)设在底架(1)或拉手(4)上,并通过两个安装环(5‑5)安装在外环(5‑1)中,外环(5‑1)的内表面上设有多个凸轮型线式的开口槽(5‑1‑1),压缩弹簧(5‑3)的一端固定在开口槽(5‑1‑1)的大端中,另一端连接滚珠(5‑4),滚珠(5‑4)使

爬楼梯能够锻炼哪些肌肉.docx
爬楼梯能够锻炼哪些肌肉爬楼梯是一种针对下身的运动,如果用适当的强度和速度爬楼梯,确实能消除腿部脂肪,收紧腿部肌肉,塑造腿部曲线。要防止爬楼梯长肌肉,就要控制好爬楼梯的速度和运动量,要保持一种有氧运动的状态,才能达到消除脂肪、拉长曲线的目的。爬楼梯简单又省钱,效果却是跟去健身房差不多,既可以消耗卡路里,又可以锻炼身体。另外,如果在走楼梯时,每次踏两个阶梯,可带动大腿及臀部肌肉群,紧实效果更佳。爬楼梯锻炼的正确方法1、将小台阶置于身体右侧,右脚踩在台阶上,左脚踩在地面上;2、身体微向下蹲,膝盖弯曲时,不可超过