
一种运用于无人驾驶的全自由度转向的线控底盘平台.pdf

建英****66


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种运用于无人驾驶的全自由度转向的线控底盘平台.pdf
一种运用于无人驾驶的全自由度转向的线控底盘平台,包括安装在车架和驱动系统之间的悬架系统,所述驱动系统包括四个安装在悬架系统下的轮毂电机带轮胎总成;通过四个转向电机分别对四个车轮进行独立的转向,转向电机通过减速机进行减速增扭,提高控制精度及扭矩,并通过底盘控制器及电机控制器根据整车的转向角度对四个车轮分别进行转向控制,四个车轮间没有固定的机械结构进行连接,四个车轮转向角度由上述控制器进行调节和控制,因此可以实现整车小转向半径、零转向半径甚至横向行驶功能,极大的提高了整车的灵活性,扩展了使用范围。
一种无人驾驶车辆的线控底盘系统.pdf
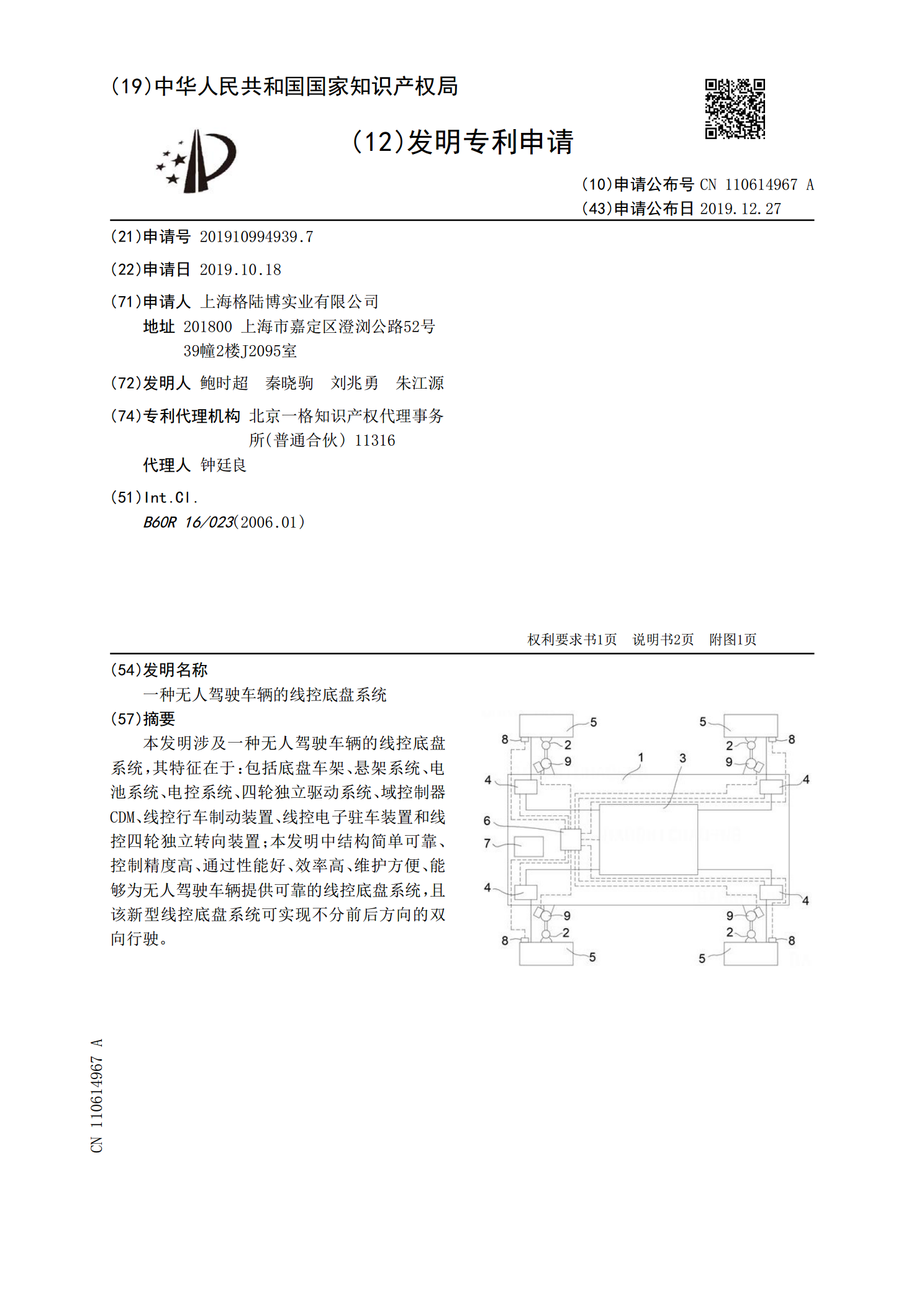
本发明涉及一种无人驾驶车辆的线控底盘系统,其特征在于:包括底盘车架、悬架系统、电池系统、电控系统、四轮独立驱动系统、域控制器CDM、线控行车制动装置、线控电子驻车装置和线控四轮独立转向装置;本发明中结构简单可靠、控制精度高、通过性能好、效率高、维护方便、能够为无人驾驶车辆提供可靠的线控底盘系统,且该新型线控底盘系统可实现不分前后方向的双向行驶。
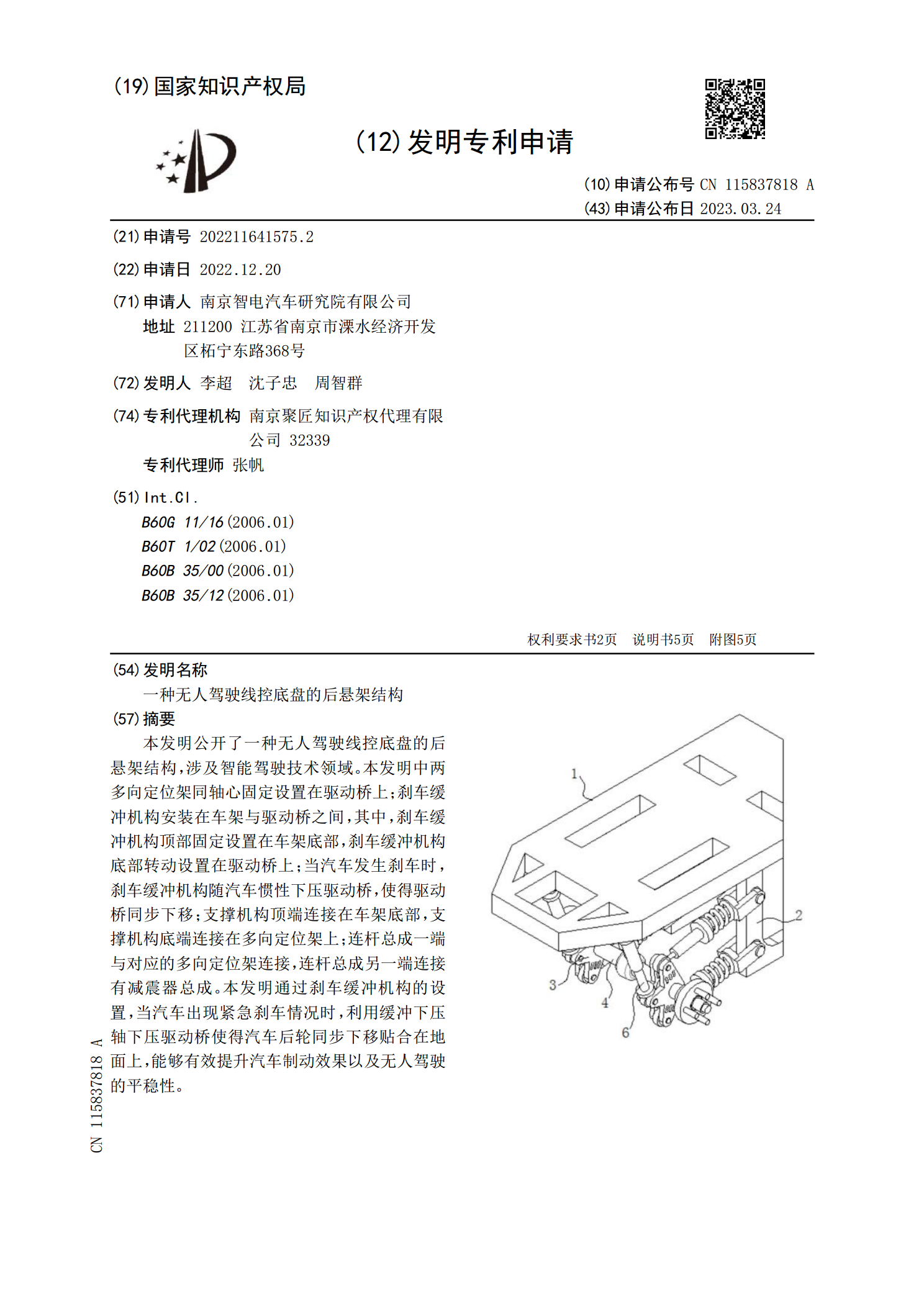
一种无人驾驶线控底盘的后悬架结构.pdf
本发明公开了一种无人驾驶线控底盘的后悬架结构,涉及智能驾驶技术领域。本发明中两多向定位架同轴心固定设置在驱动桥上;刹车缓冲机构安装在车架与驱动桥之间,其中,刹车缓冲机构顶部固定设置在车架底部,刹车缓冲机构底部转动设置在驱动桥上;当汽车发生刹车时,刹车缓冲机构随汽车惯性下压驱动桥,使得驱动桥同步下移;支撑机构顶端连接在车架底部,支撑机构底端连接在多向定位架上;连杆总成一端与对应的多向定位架连接,连杆总成另一端连接有减震器总成。本发明通过刹车缓冲机构的设置,当汽车出现紧急刹车情况时,利用缓冲下压轴下压驱动桥使
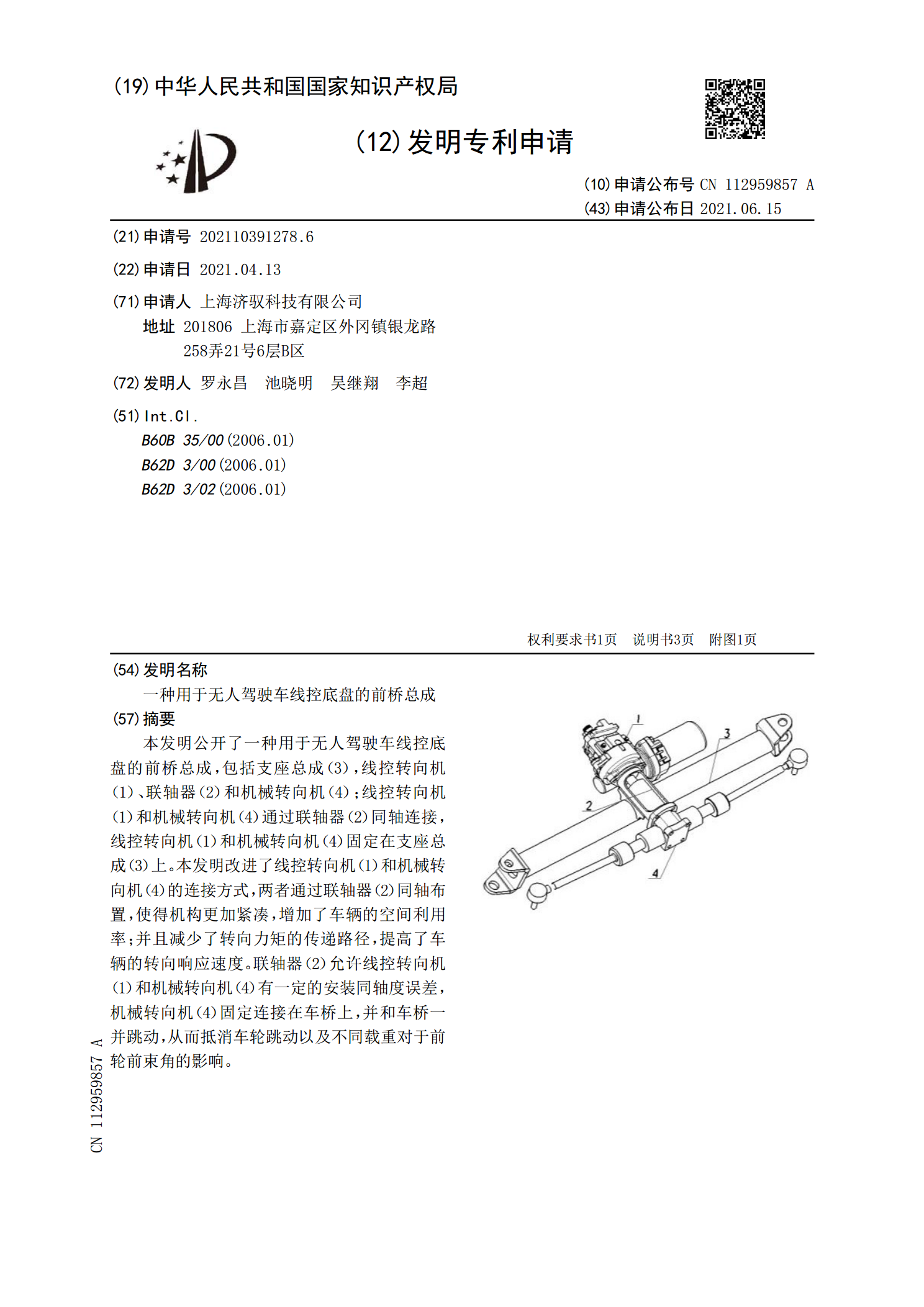
一种用于无人驾驶车线控底盘的前桥总成.pdf
本发明公开了一种用于无人驾驶车线控底盘的前桥总成,包括支座总成(3),线控转向机(1)、联轴器(2)和机械转向机(4);线控转向机(1)和机械转向机(4)通过联轴器(2)同轴连接,线控转向机(1)和机械转向机(4)固定在支座总成(3)上。本发明改进了线控转向机(1)和机械转向机(4)的连接方式,两者通过联轴器(2)同轴布置,使得机构更加紧凑,增加了车辆的空间利用率;并且减少了转向力矩的传递路径,提高了车辆的转向响应速度。联轴器(2)允许线控转向机(1)和机械转向机(4)有一定的安装同轴度误差,机械转向机(

一种无人驾驶汽车电动线控转向装置及转向控制方法.pdf
本发明公开了一种无人驾驶汽车电动线控转向装置,包括:转向电机;直齿轮减速箱,其通过主动齿轮与所述转向电机的输出轴连接;锥齿轮减速器,其通过锥形主动齿轮与所述直齿轮减速箱的输出轴连接;转向传动轴,其一端穿过所述锥齿轮减速器,并与所述锥齿轮减速器的从动齿轮连接。本发明提供的无人驾驶汽车电动线控转向装置,采用电动机提供动力,占用空间小,通用性强,扭矩大,可以实现转向的精确控制。本发明提供的基于无人驾驶汽车电动线控转向装置的无人驾驶汽车转向控制方法,通过模糊控制的方法在车辆行驶过程中对转向传动轴的转动角度进行控制