
车辆紧急车道保持方法及装置.pdf

婀娜****aj

1/10
2/10

3/10
4/10

5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
车辆紧急车道保持方法及装置.pdf
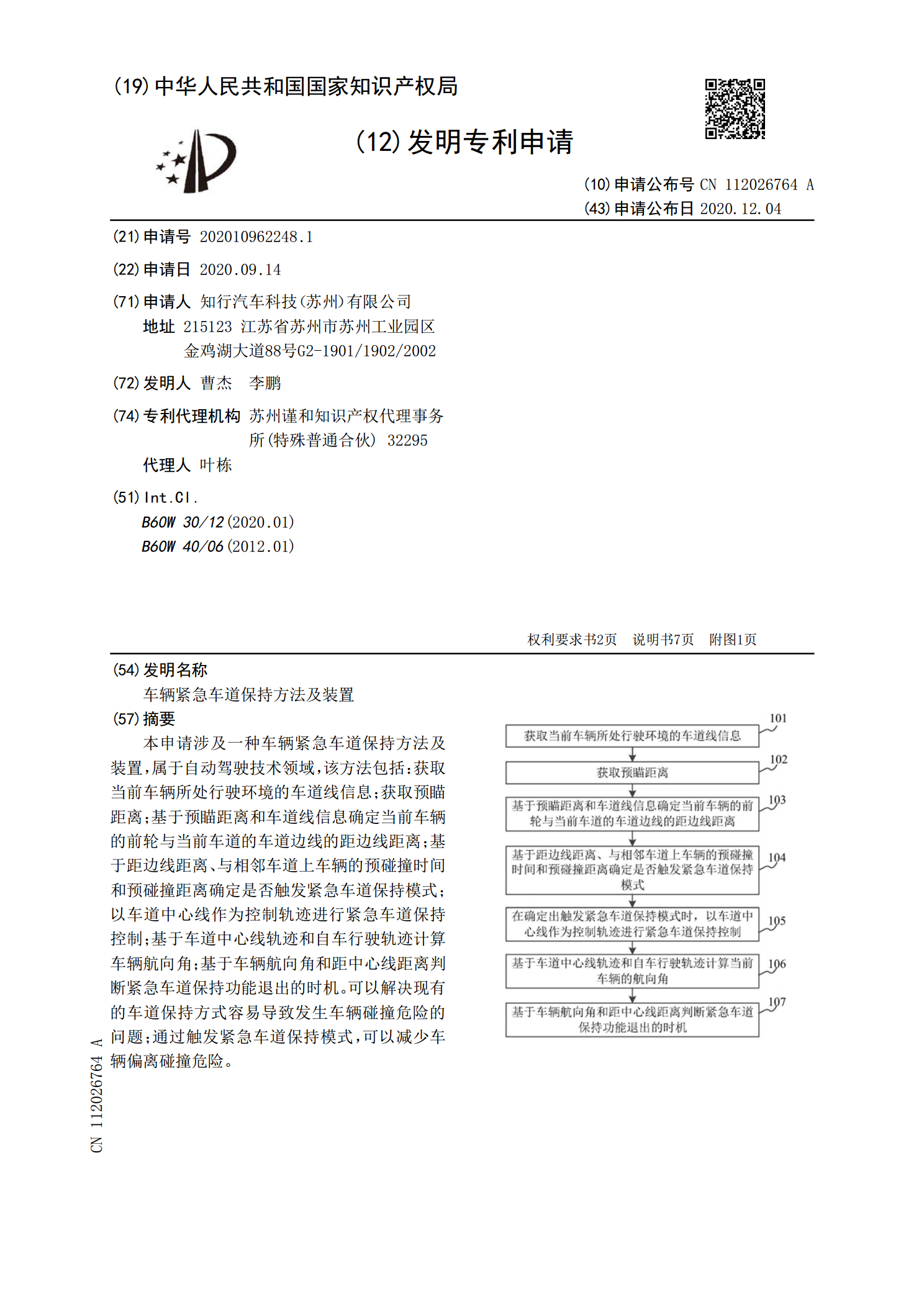
本申请涉及一种车辆紧急车道保持方法及装置,属于自动驾驶技术领域,该方法包括:获取当前车辆所处行驶环境的车道线信息;获取预瞄距离;基于预瞄距离和车道线信息确定当前车辆的前轮与当前车道的车道边线的距边线距离;基于距边线距离、与相邻车道上车辆的预碰撞时间和预碰撞距离确定是否触发紧急车道保持模式;以车道中心线作为控制轨迹进行紧急车道保持控制;基于车道中心线轨迹和自车行驶轨迹计算车辆航向角;基于车辆航向角和距中心线距离判断紧急车道保持功能退出的时机。可以解决现有的车道保持方式容易导致发生车辆碰撞危险的问题;通过触发
车辆紧急车道保持系统的仿真测试评价方法和评价系统.pdf
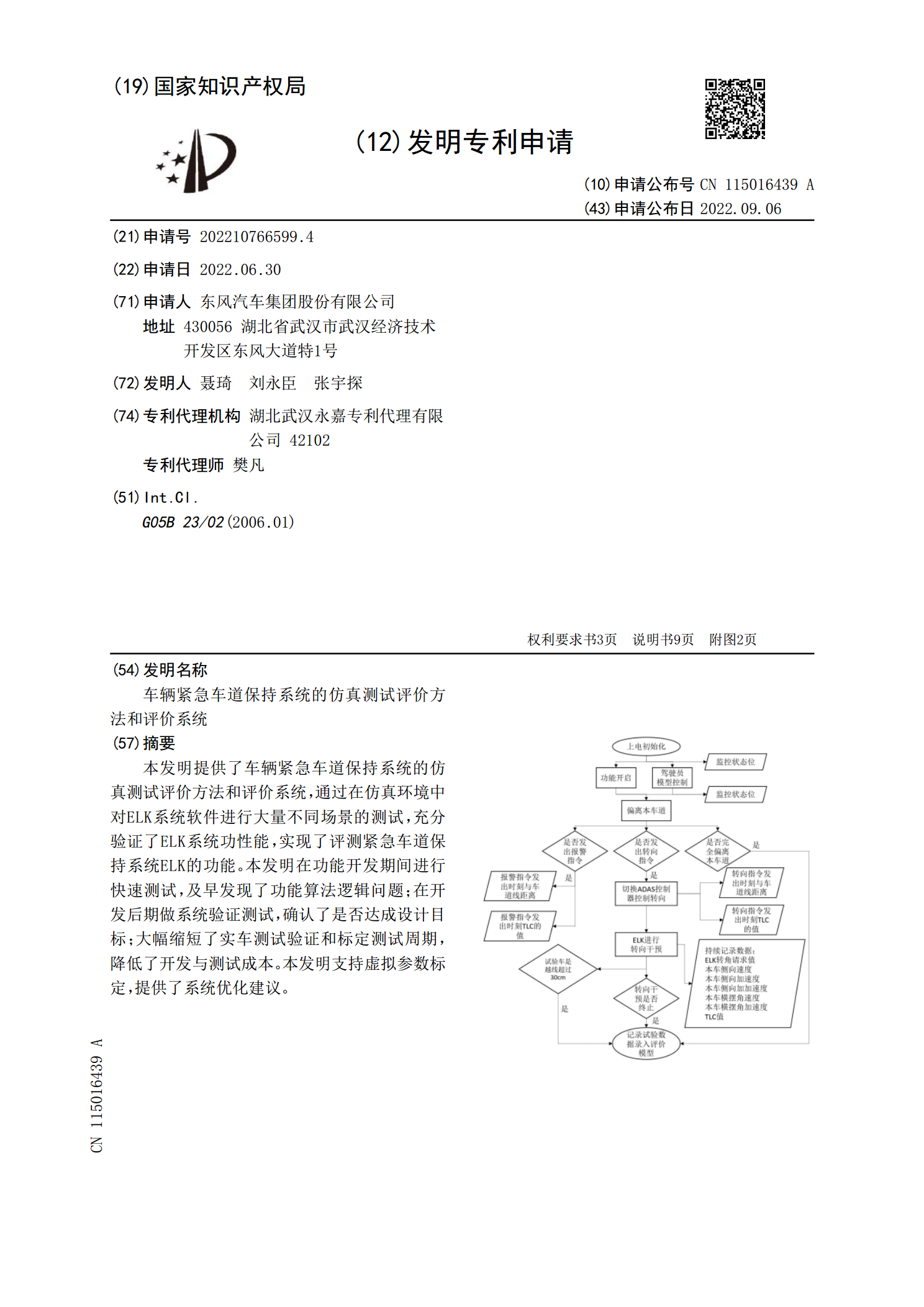
本发明提供了车辆紧急车道保持系统的仿真测试评价方法和评价系统,通过在仿真环境中对ELK系统软件进行大量不同场景的测试,充分验证了ELK系统功性能,实现了评测紧急车道保持系统ELK的功能。本发明在功能开发期间进行快速测试,及早发现了功能算法逻辑问题;在开发后期做系统验证测试,确认了是否达成设计目标;大幅缩短了实车测试验证和标定测试周期,降低了开发与测试成本。本发明支持虚拟参数标定,提供了系统优化建议。

车道保持控制方法及装置.pdf
本发明实施例提供了一种车道保持控制方法、装置、可读存储介质及车辆,车道保持控制方法包括:获取道路信息图像中车道线的识别结果,根据与识别结果相对应的调整规则确定或调整摄像单元与车体的相对夹角,并获取新的道路信息图像,直至道路信息图像中的车道线处于可识别范围内,从而可以提高摄像单元获取处于可识别范围内的车道线的道路信息图像的概率,得到更为准确的车道线信息,提高识别车道线的算法的鲁棒性;另一方面,由于摄像单元相对于车体的夹角可以调节,可以减小摄像单元初始安装位置对车道线识别和车道保持功能的实现带来的影响,因此可

用于车辆的车道保持控制方法.pdf
一种用于车辆的车道保持控制方法可以包括:在车辆直行的制动期间,通过控制器确定预定车轮之间是否存在车轮转速差;基于预定车轮之间的车轮转速差,通过控制器来确定参考车轮和控制车轮;以及当存在车轮转速差时,通过执行对控制车轮的预降压控制而通过控制器来减小在参考车轮和控制车轮之间的车轮转速差。

无人驾驶车辆的车道保持及车道线检测方法.docx
无人驾驶车辆的车道保持及车道线检测方法无人驾驶车辆的车道保持及车道线检测方法摘要:随着无人驾驶技术的迅速发展,无人驾驶车辆的车道保持及车道线检测方法成为了研究的热点。本文通过对无人驾驶车辆的车道保持及车道线检测的相关技术进行分析和总结,探讨了其原理和应用,以期为无人驾驶技术的进一步研究提供参考。关键词:无人驾驶车辆,车道保持,车道线检测一、引言随着科技的不断进步和应用,无人驾驶车辆的研究和发展取得了长足的进步。其中,车道保持及车道线检测是无人驾驶车辆中的重要技术之一。车道保持技术旨在确保无人驾驶车辆在道路