
退火镀锡机的自动上下料收线机.pdf

思洁****爱吗

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
退火镀锡机的自动上下料收线机.pdf
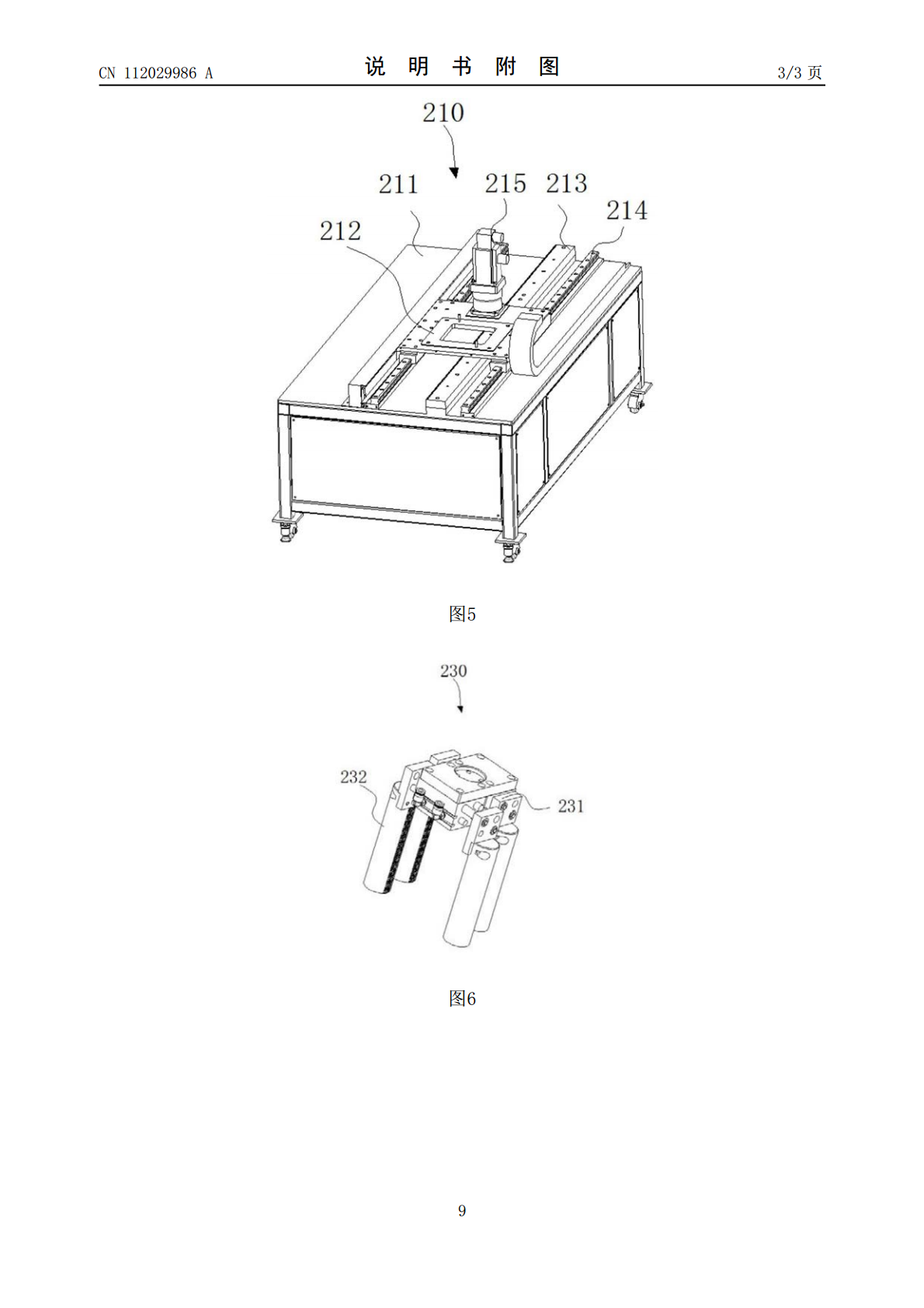
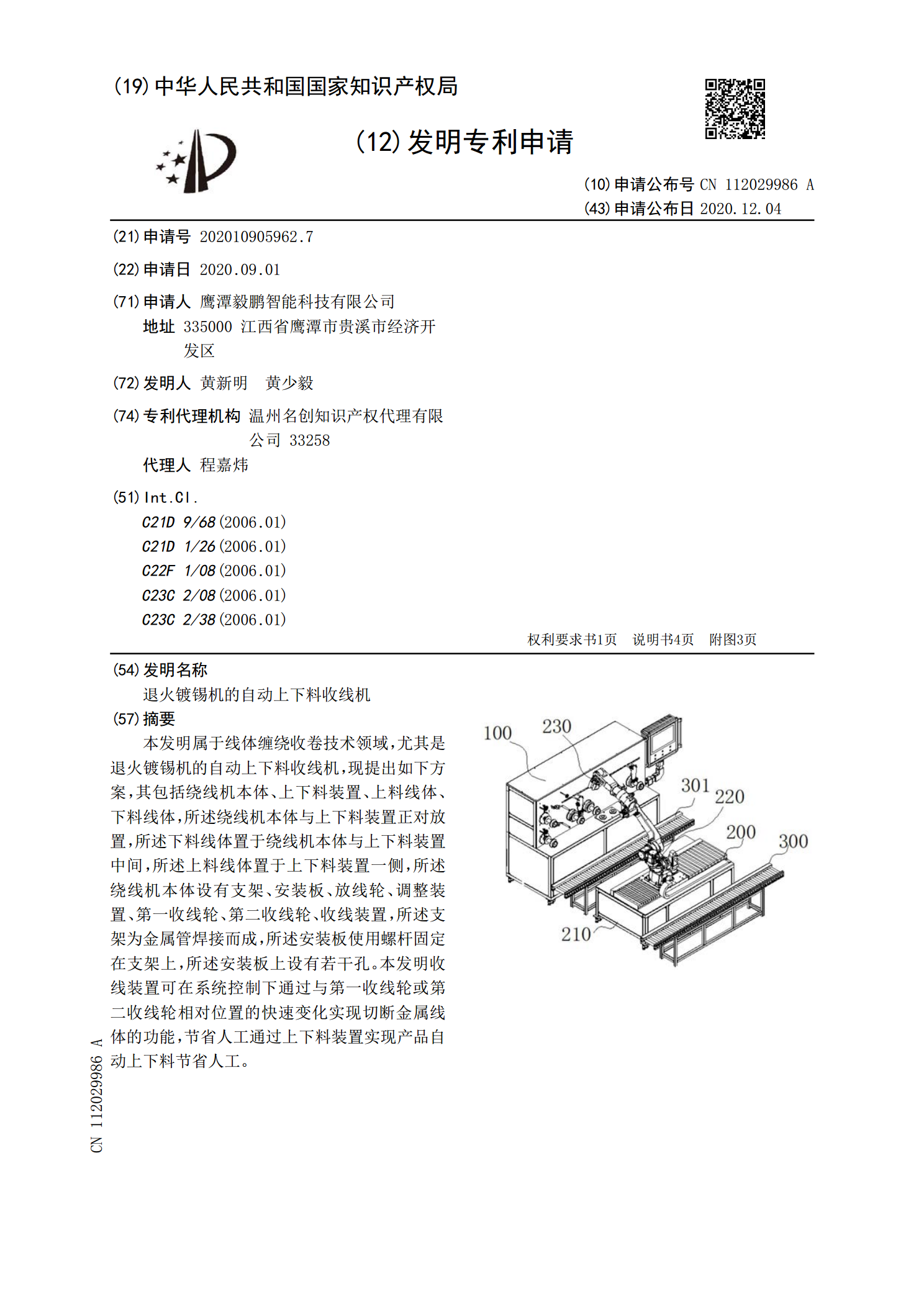
本发明属于线体缠绕收卷技术领域,尤其是退火镀锡机的自动上下料收线机,现提出如下方案,其包括绕线机本体、上下料装置、上料线体、下料线体,所述绕线机本体与上下料装置正对放置,所述下料线体置于绕线机本体与上下料装置中间,所述上料线体置于上下料装置一侧,所述绕线机本体设有支架、安装板、放线轮、调整装置、第一收线轮、第二收线轮、收线装置,所述支架为金属管焊接而成,所述安装板使用螺杆固定在支架上,所述安装板上设有若干孔。本发明收线装置可在系统控制下通过与第一收线轮或第二收线轮相对位置的快速变化实现切断金属线体的功能,
自动收线机.pdf
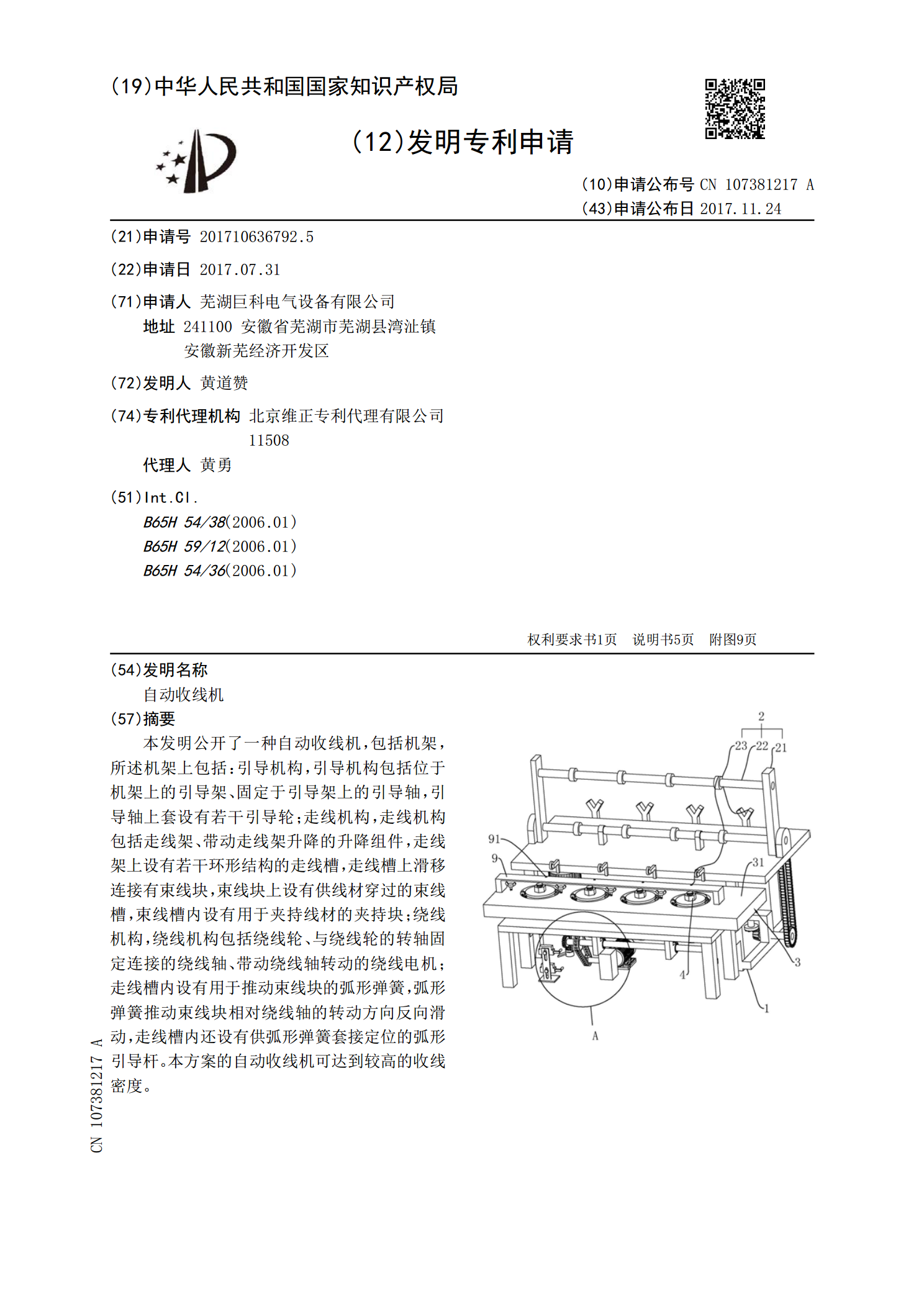
本发明公开了一种自动收线机,包括机架,所述机架上包括:引导机构,引导机构包括位于机架上的引导架、固定于引导架上的引导轴,引导轴上套设有若干引导轮;走线机构,走线机构包括走线架、带动走线架升降的升降组件,走线架上设有若干环形结构的走线槽,走线槽上滑移连接有束线块,束线块上设有供线材穿过的束线槽,束线槽内设有用于夹持线材的夹持块;绕线机构,绕线机构包括绕线轮、与绕线轮的转轴固定连接的绕线轴、带动绕线轴转动的绕线电机;走线槽内设有用于推动束线块的弧形弹簧,弧形弹簧推动束线块相对绕线轴的转动方向反向滑动,走线槽内
一种退火镀锡机用的镀锡机构.pdf
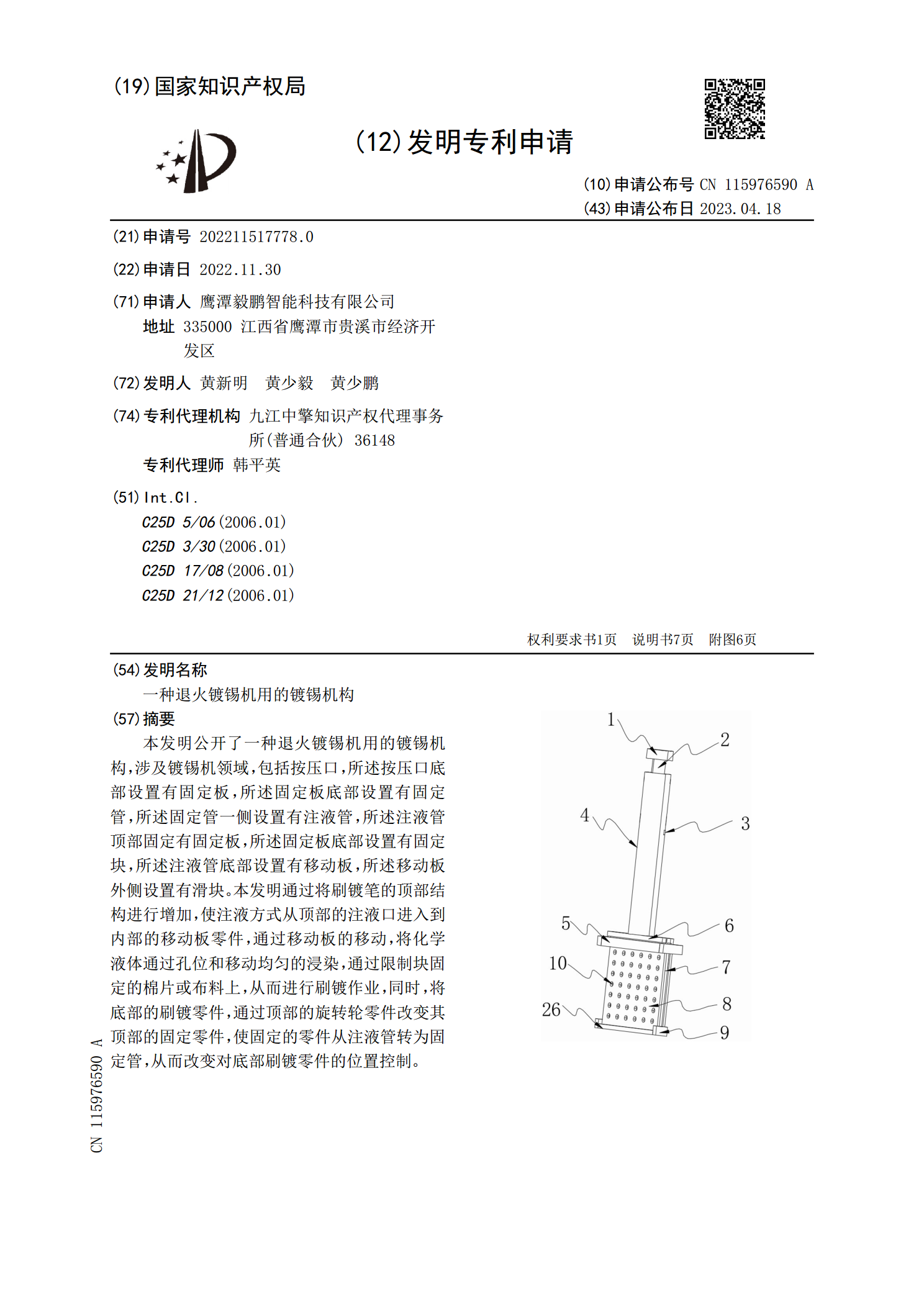
本发明公开了一种退火镀锡机用的镀锡机构,涉及镀锡机领域,包括按压口,所述按压口底部设置有固定板,所述固定板底部设置有固定管,所述固定管一侧设置有注液管,所述注液管顶部固定有固定板,所述固定板底部设置有固定块,所述注液管底部设置有移动板,所述移动板外侧设置有滑块。本发明通过将刷镀笔的顶部结构进行增加,使注液方式从顶部的注液口进入到内部的移动板零件,通过移动板的移动,将化学液体通过孔位和移动均匀的浸染,通过限制块固定的棉片或布料上,从而进行刷镀作业,同时,将底部的刷镀零件,通过顶部的旋转轮零件改变其顶部的固定
高速自动镀锡机.pdf
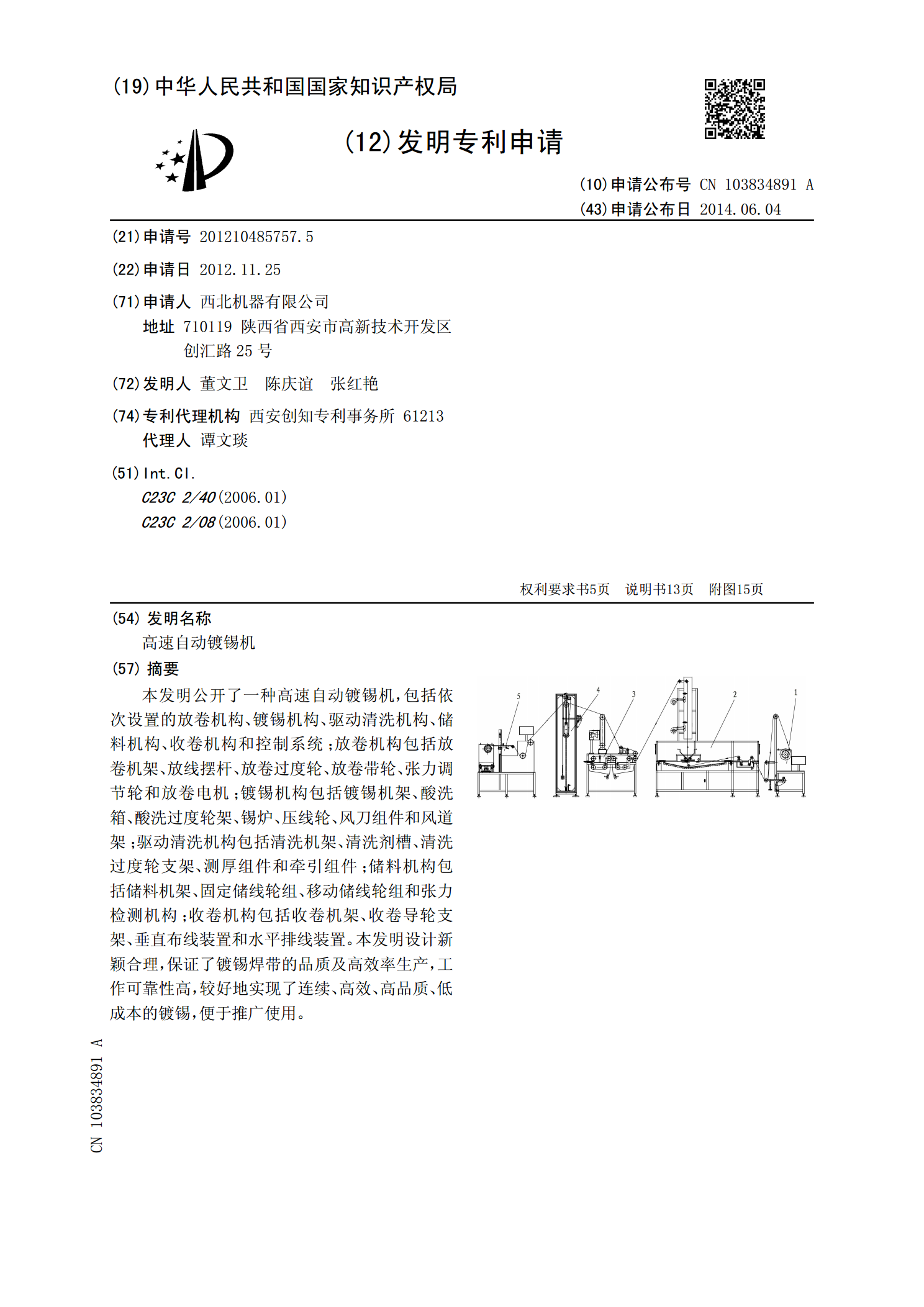
本发明公开了一种高速自动镀锡机,包括依次设置的放卷机构、镀锡机构、驱动清洗机构、储料机构、收卷机构和控制系统;放卷机构包括放卷机架、放线摆杆、放卷过度轮、放卷带轮、张力调节轮和放卷电机;镀锡机构包括镀锡机架、酸洗箱、酸洗过度轮架、锡炉、压线轮、风刀组件和风道架;驱动清洗机构包括清洗机架、清洗剂槽、清洗过度轮支架、测厚组件和牵引组件;储料机构包括储料机架、固定储线轮组、移动储线轮组和张力检测机构;收卷机构包括收卷机架、收卷导轮支架、垂直布线装置和水平排线装置。本发明设计新颖合理,保证了镀锡焊带的品质及高效率
一种铜线退火镀锡机的退火装置.pdf
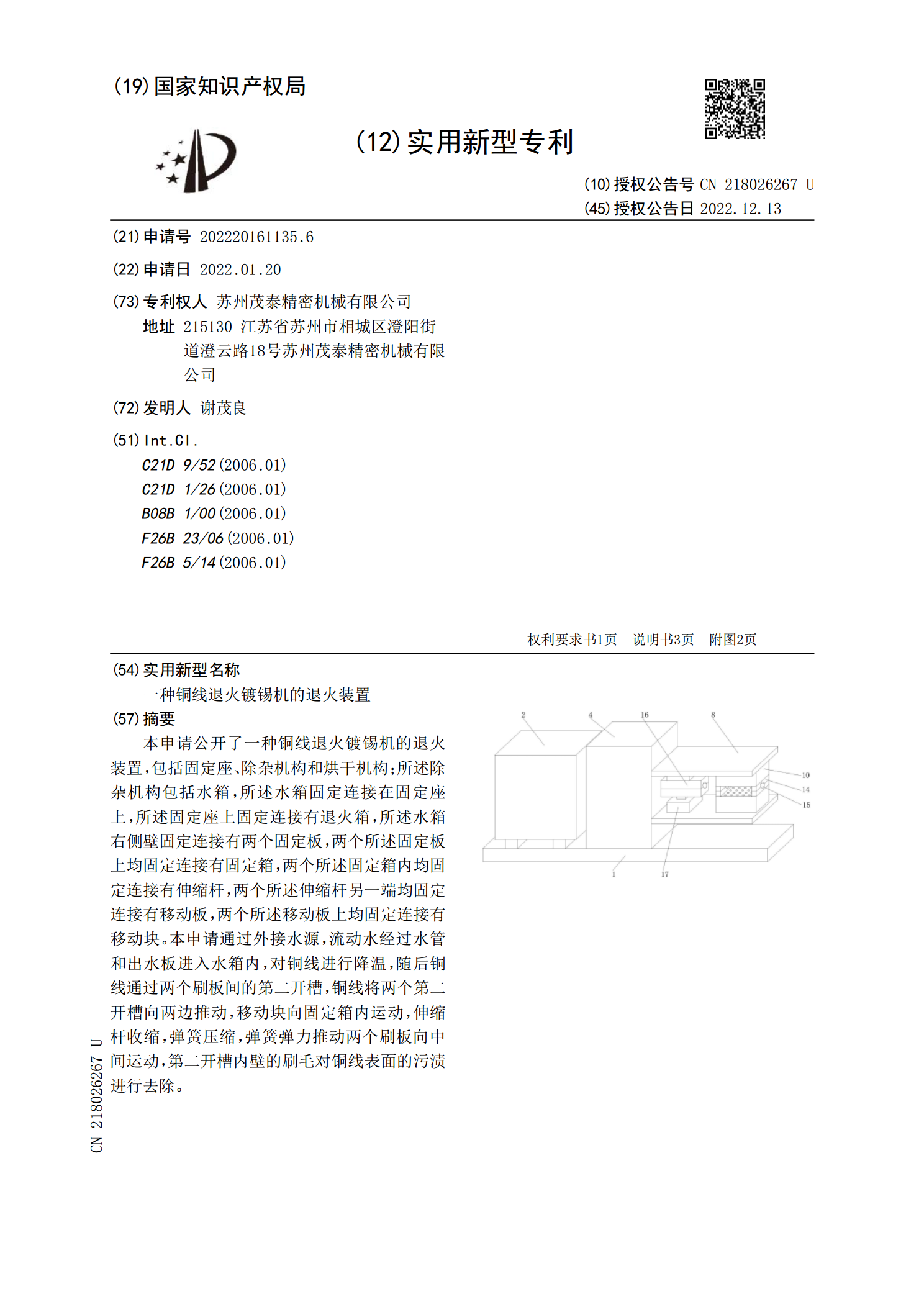
本申请公开了一种铜线退火镀锡机的退火装置,包括固定座、除杂机构和烘干机构;所述除杂机构包括水箱,所述水箱固定连接在固定座上,所述固定座上固定连接有退火箱,所述水箱右侧壁固定连接有两个固定板,两个所述固定板上均固定连接有固定箱,两个所述固定箱内均固定连接有伸缩杆,两个所述伸缩杆另一端均固定连接有移动板,两个所述移动板上均固定连接有移动块。本申请通过外接水源,流动水经过水管和出水板进入水箱内,对铜线进行降温,随后铜线通过两个刷板间的第二开槽,铜线将两个第二开槽向两边推动,移动块向固定箱内运动,伸缩杆收缩,弹簧