
一种可在轨更换的模块化快换机械接口.pdf

慧娇****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种可在轨更换的模块化快换机械接口.pdf
一种可在轨更换的模块化快换机械接口,涉及可在轨更换机械接口领域,包括伺服电机、空间凸轮上固定板、空间凸轮下固定板、定位导向板、定位导向销、传动轴、传动装置、传动齿轮、槽轮机构、空间凸轮机构、被动齿轮、内爪;内爪包括传动筒、连接齿板;槽轮机构包括主动拨盘和槽轮;空间凸轮机构包括空间凸轮和驱动销,空间凸轮呈套筒状、设有轴向起伏的驱动滑槽,空间凸轮套设在槽轮上侧的传动筒上;驱动销设置在传动筒上,连接齿板位于空间凸轮上固定板上侧,伺服电机驱动传动轴转动,主动拨盘设置在传动轴上。具有传动简单、结构紧凑,锁合快速、传
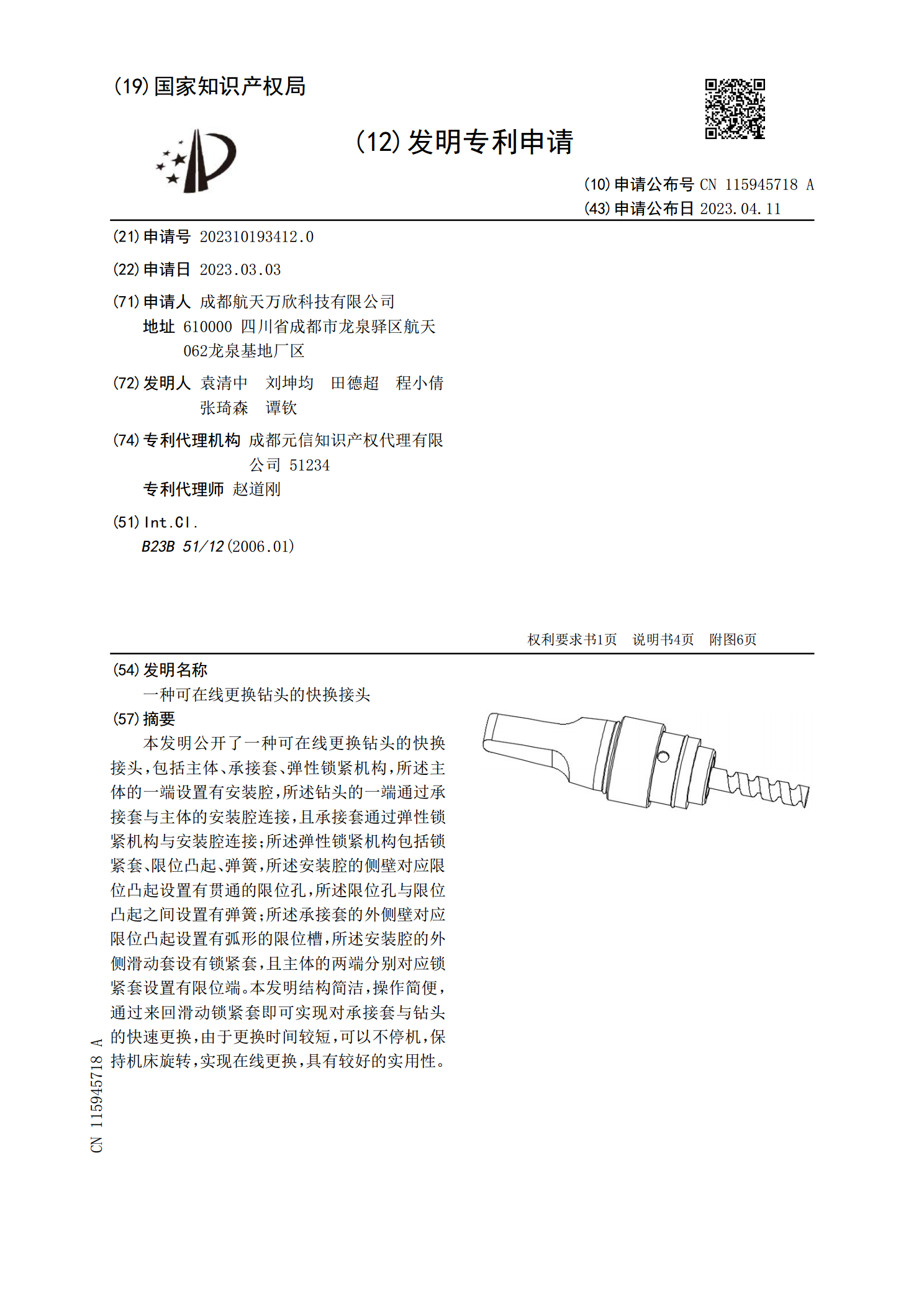
一种可在线更换钻头的快换接头.pdf
本发明公开了一种可在线更换钻头的快换接头,包括主体、承接套、弹性锁紧机构,所述主体的一端设置有安装腔,所述钻头的一端通过承接套与主体的安装腔连接,且承接套通过弹性锁紧机构与安装腔连接;所述弹性锁紧机构包括锁紧套、限位凸起、弹簧,所述安装腔的侧壁对应限位凸起设置有贯通的限位孔,所述限位孔与限位凸起之间设置有弹簧;所述承接套的外侧壁对应限位凸起设置有弧形的限位槽,所述安装腔的外侧滑动套设有锁紧套,且主体的两端分别对应锁紧套设置有限位端。本发明结构简洁,操作简便,通过来回滑动锁紧套即可实现对承接套与钻头的快速更
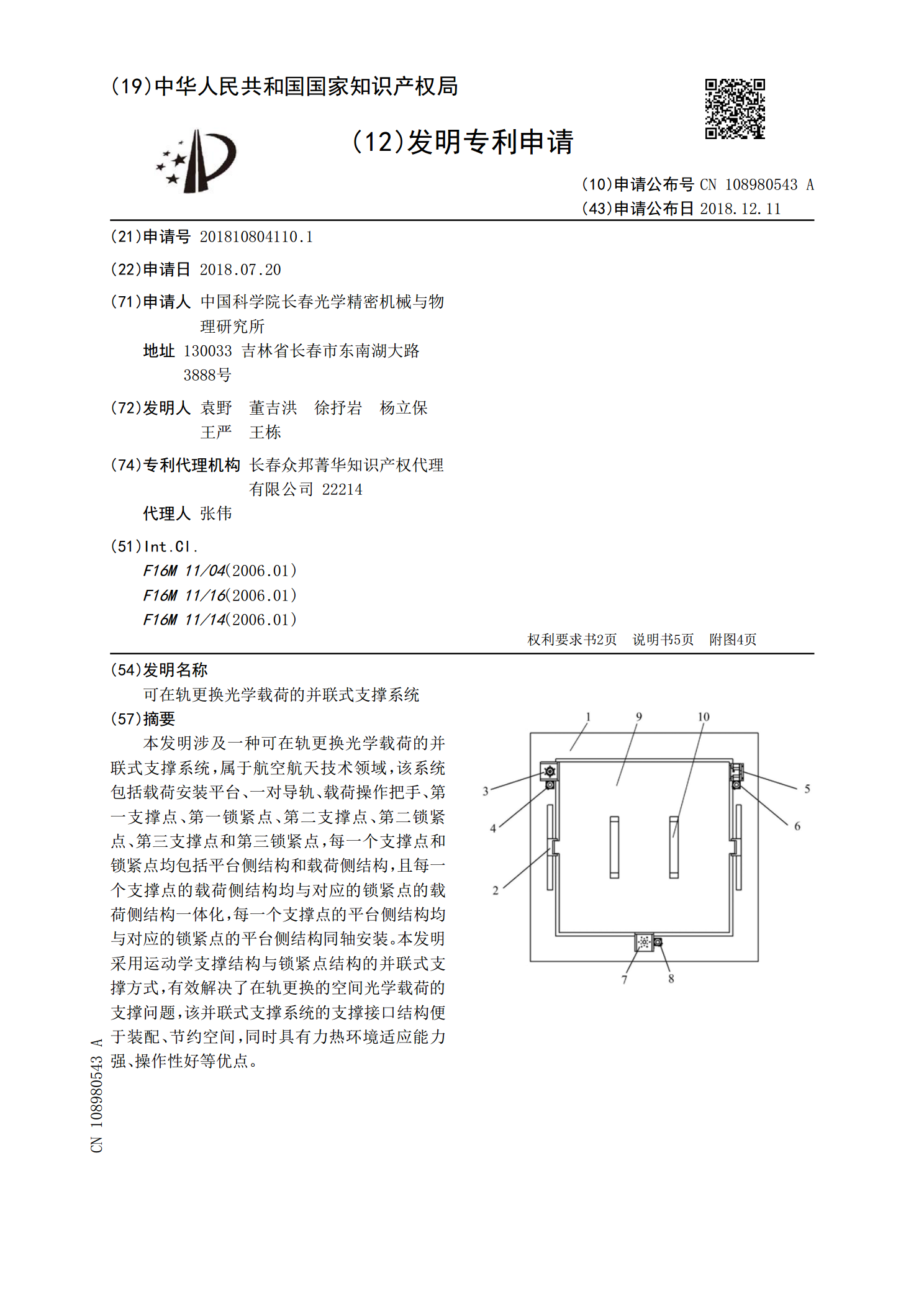
可在轨更换光学载荷的并联式支撑系统.pdf
本发明涉及一种可在轨更换光学载荷的并联式支撑系统,属于航空航天技术领域,该系统包括载荷安装平台、一对导轨、载荷操作把手、第一支撑点、第一锁紧点、第二支撑点、第二锁紧点、第三支撑点和第三锁紧点,每一个支撑点和锁紧点均包括平台侧结构和载荷侧结构,且每一个支撑点的载荷侧结构均与对应的锁紧点的载荷侧结构一体化,每一个支撑点的平台侧结构均与对应的锁紧点的平台侧结构同轴安装。本发明采用运动学支撑结构与锁紧点结构的并联式支撑方式,有效解决了在轨更换的空间光学载荷的支撑问题,该并联式支撑系统的支撑接口结构便于装配、节约空

可在轨更换电池板的充气展开太阳翼.pdf
可在轨更换电池板的充气展开太阳翼,它涉及一种充气展开太阳翼。针对太阳翼电池板在轨运行出现损坏或老化现象时,由宇航员对其进行整体更换,浪费材料,飞行器稳定性差,宇航员的生命安全无保障问题。两根支撑管通过接盘与第一、二横板固接,电池基板上固装有电池片,充气管道与支撑管连通,导线与支撑管连接,支撑管上套装有开口滑环,电池基板与开口滑环固接,第二横板上固装有两个拉环,与第一横板固接的两个接盘上各固装有一个缠线转轮,拉绳的一端缠绕在缠线转轮上,另一端穿过拉环及开口滑环上的拉绳穿过孔。本发明通过拉绳的作用
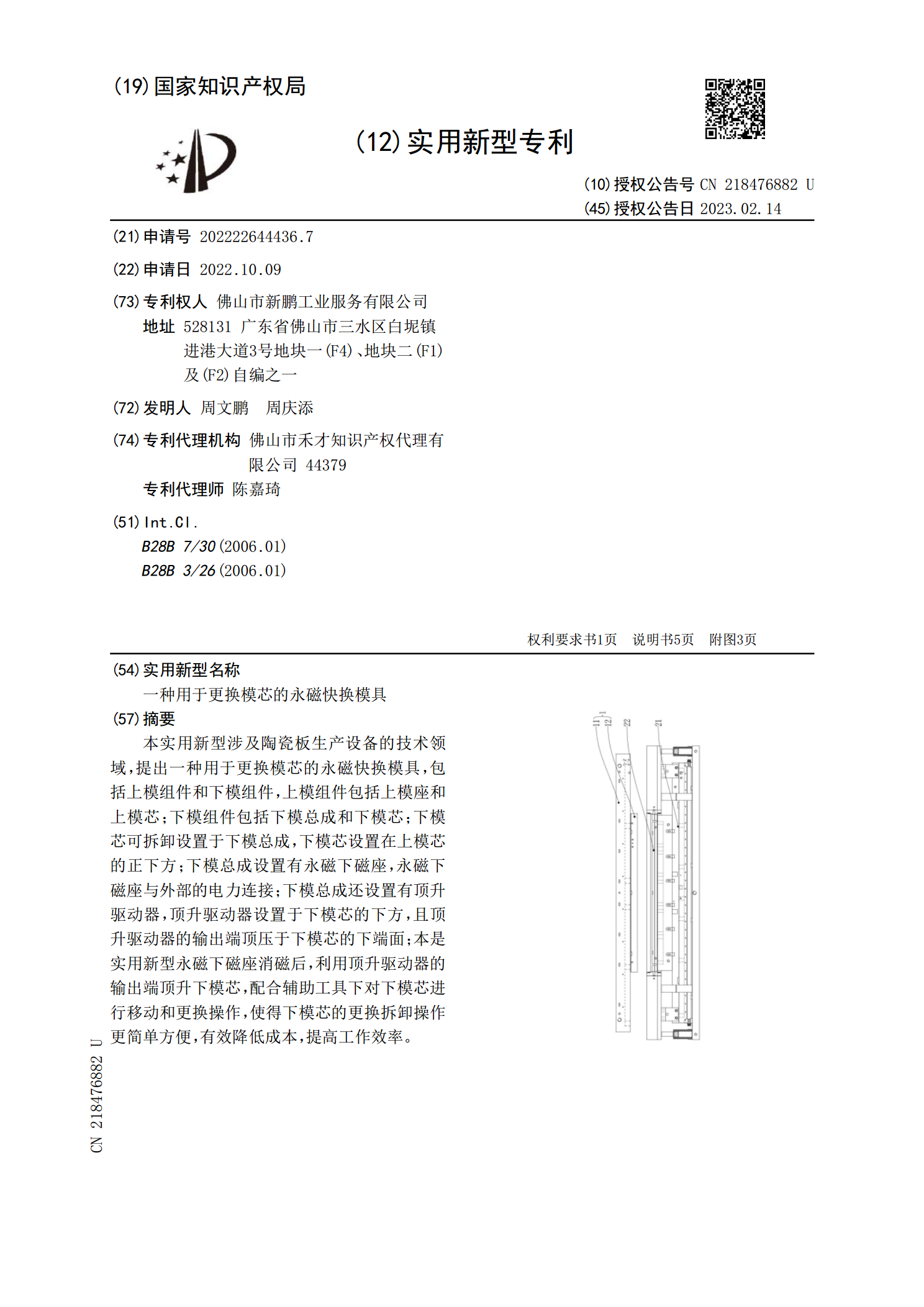
一种用于更换模芯的永磁快换模具.pdf
本实用新型涉及陶瓷板生产设备的技术领域,提出一种用于更换模芯的永磁快换模具,包括上模组件和下模组件,上模组件包括上模座和上模芯;下模组件包括下模总成和下模芯;下模芯可拆卸设置于下模总成,下模芯设置在上模芯的正下方;下模总成设置有永磁下磁座,永磁下磁座与外部的电力连接;下模总成还设置有顶升驱动器,顶升驱动器设置于下模芯的下方,且顶升驱动器的输出端顶压于下模芯的下端面;本是实用新型永磁下磁座消磁后,利用顶升驱动器的输出端顶升下模芯,配合辅助工具下对下模芯进行移动和更换操作,使得下模芯的更换拆卸操作更简单方便,