
基于距离测量的机器人误差标定及参数选定.pdf

qw****27

1/6
2/6

3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于距离测量的机器人误差标定及参数选定.pdf
"#$%!&"!"#$#%&''(<,8!"#$%!#%#$#&%'()*+,-(./0121+34+150*6178(.90*(+,)71:6,+;967*(+,)71:6=(->%#!?(@&摇摇5=?@G\peÆ!Ç!!ÈÉÊ!!Ë!Ê#FEÛJD+GGHIJK+L$<J&$#H%#%!!P!!!Q!PÌÍÎ7ÏVWXuÐHÑÒÓÔ>?$¢£ÕÖ]K½ÑÒH×ØÙÚv>s[ÛZN#Z0+,517BN,*70+E0*3%ÑÒÜÝÎ7ÏÞߧà$áÚvÜÝâãäåæçè

基于标准球距离约束的工业机器人参数标定.docx
基于标准球距离约束的工业机器人参数标定基于标准球距离约束的工业机器人参数标定摘要:工业机器人广泛应用于生产线上,但是准确地标定机器人的参数仍然是一个挑战。本论文提出了一种基于标准球距离约束的方法来标定工业机器人的参数。该方法通过使用标准球距离作为测量指标,并结合最小二乘优化算法,可以准确地计算出机器人的关节角度和坐标转换参数。实验结果表明,该方法可以提高机器人的定位精度,使其在工业生产中更加准确和稳定。1.引言工业机器人在生产线上起着至关重要的作用,可以提高生产效率和产品质量。然而,要保证机器人的准确性,

基于距离误差的机器人参数辨识模型与冗余性分析.docx
基于距离误差的机器人参数辨识模型与冗余性分析基于距离误差的机器人参数辨识模型与冗余性分析摘要:机器人参数辨识是机器人控制领域的关键技术之一。本文提出了一种基于距离误差的机器人参数辨识模型,并对其进行了冗余性分析。分析结果表明,该模型能够有效地辨识机器人的不确定参数,并具有较好的冗余性能。该研究对于机器人控制算法的优化和提升具有重要的理论和实践意义。关键词:机器人;参数辨识;距离误差;冗余性分析1.引言随着机器人技术的不断发展,机器人已广泛应用于工业制造、农业生产、医疗护理等领域。在机器人控制中,准确获得机
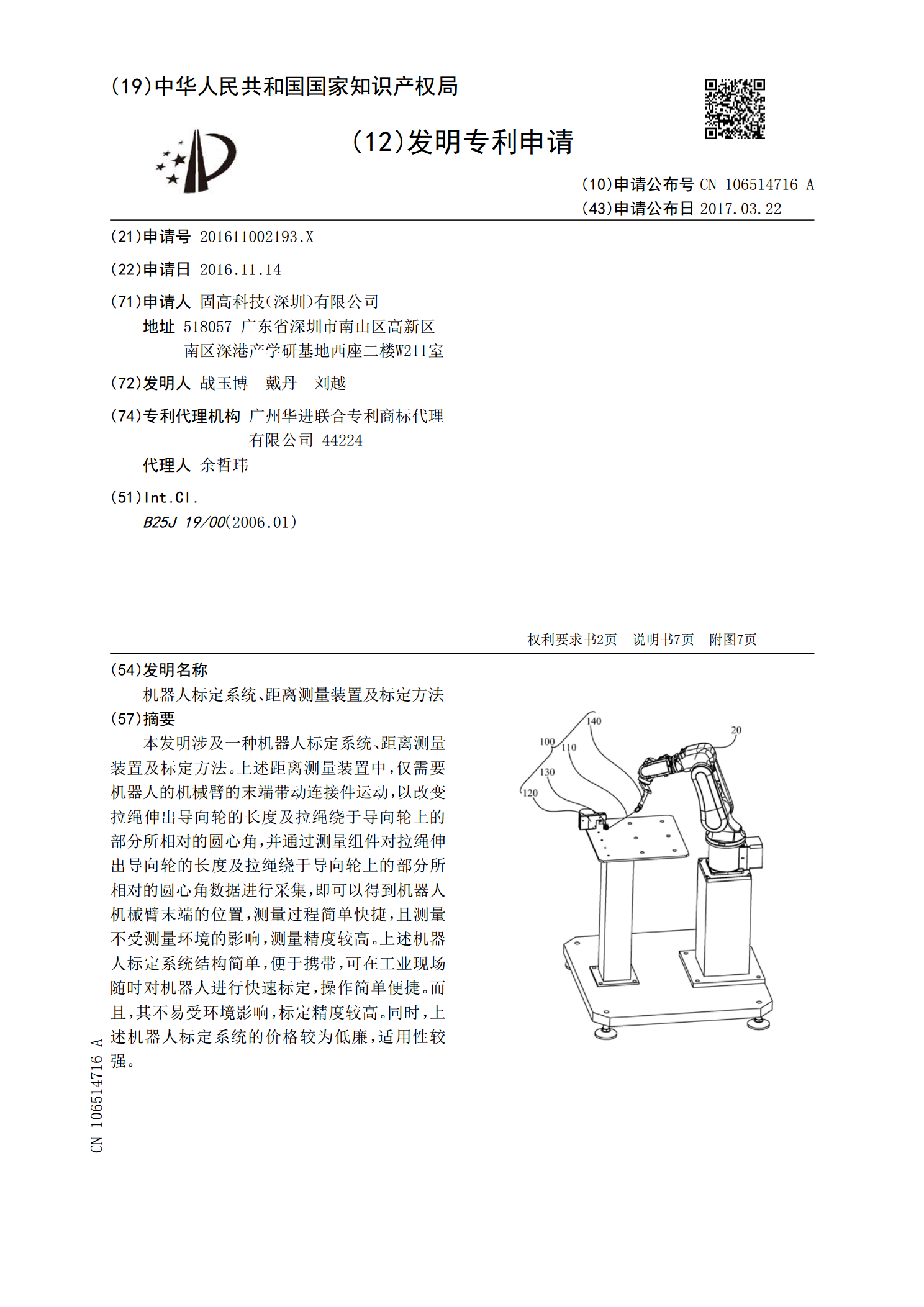
机器人标定系统、距离测量装置及标定方法.pdf
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定

并联坐标测量机误差分析与参数标定.pptx
并联坐标测量机误差分析与参数标定目录添加目录项标题并联坐标测量机误差分析误差来源误差分类误差传递与合成误差对测量精度的影响并联坐标测量机参数标定参数标定目的参数标定方法参数标定实验设计参数标定结果分析误差补偿技术误差补偿原理误差补偿算法误差补偿实验验证误差补偿效果评估并联坐标测量机性能测试与评估性能测试内容与方法测试结果分析测量精度评估与传统测量机的比较分析结论与展望研究成果总结对并联坐标测量机发展的影响对未来研究的建议与展望感谢观看