
基于标准长度的立体视觉传感器结构参数的标定方法北京航空航空.ppt

天马****23


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共36页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于标准长度的立体视觉传感器结构参数的标定方法北京航空航空.ppt
机器视觉双目被动视觉结构光主动视觉双目主动视觉双目被动视觉双目被动视觉传感器数学模型结构光主动视觉双目主动视觉国内外研究热点标定点发生方法传统方法标定点是靠光平面与标准靶尺上的特征的边缘的交点提供的,因此,边缘的光反射会造成标定点提取的误差。要保证标准靶尺与单向移动台的严格垂直。这在实际操作中很难做到,必然会引进由于不垂直所产生的误差。要保证单向移动台的移动方向与激光面的法向垂直。这在实际操作中很难做到,必然会引进由单向移动台移动方向和激光面的夹角所产生的误差。不能实现标定点图像位置的高精度提取。拉丝法标
正交型立体视觉结构的外参数标定方法.pdf
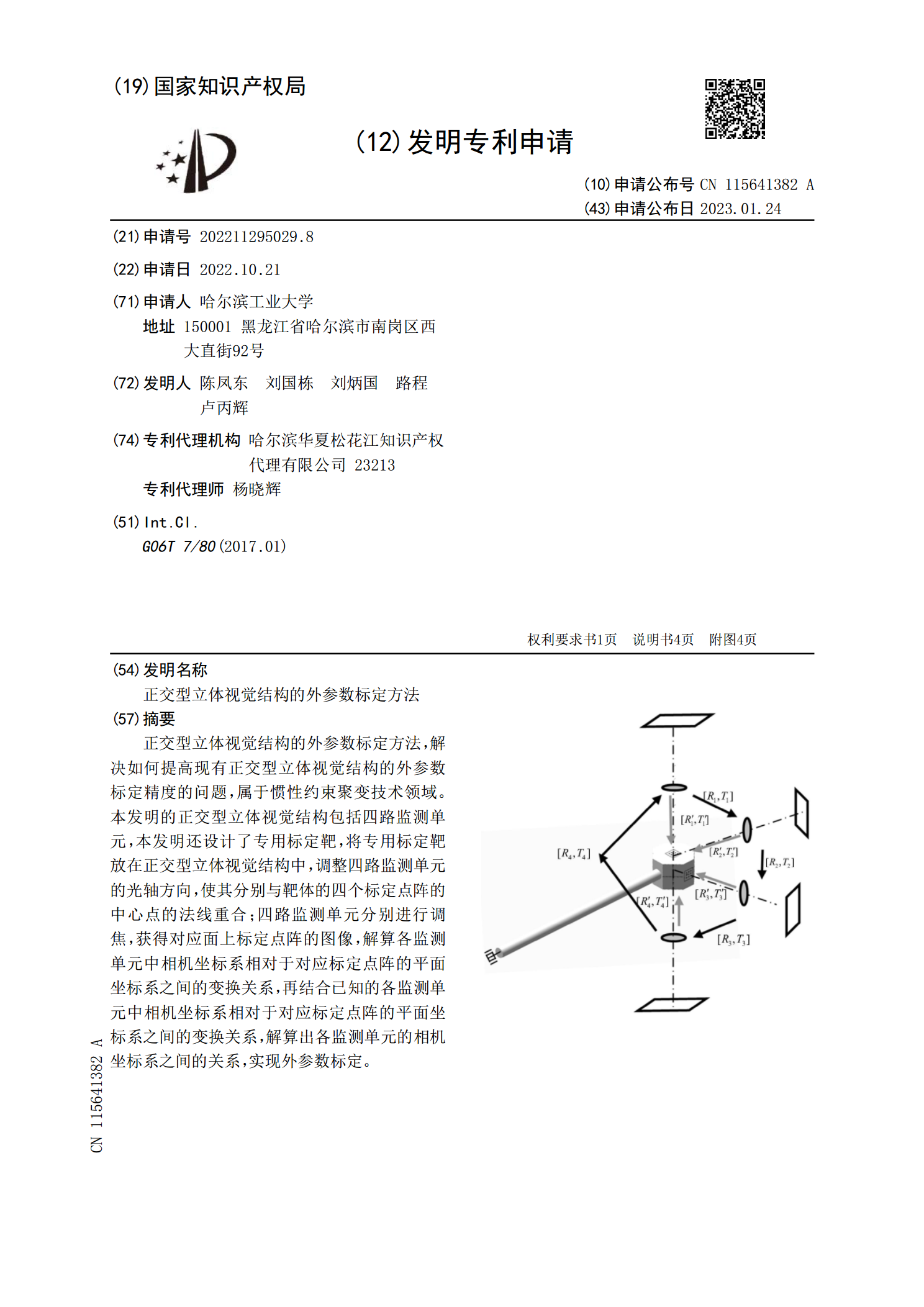
正交型立体视觉结构的外参数标定方法,解决如何提高现有正交型立体视觉结构的外参数标定精度的问题,属于惯性约束聚变技术领域。本发明的正交型立体视觉结构包括四路监测单元,本发明还设计了专用标定靶,将专用标定靶放在正交型立体视觉结构中,调整四路监测单元的光轴方向,使其分别与靶体的四个标定点阵的中心点的法线重合;四路监测单元分别进行调焦,获得对应面上标定点阵的图像,解算各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,再结合已知的各监测单元中相机坐标系相对于对应标定点阵的平面坐标系之间的变换关系,

基于结构直线特征标定的立体视觉测量方法.docx
基于结构直线特征标定的立体视觉测量方法立体视觉测量是一种近年来快速发展的三维空间位置测量技术,广泛应用于精度要求高、非接触式、自适应性强的测量领域中。其中,标定是立体视觉测量中最基础的环节,直接影响着测量结果的精度和稳定性。本文旨在介绍一种基于结构直线特征标定的立体视觉测量方法,该方法可以提高立体视觉测量的标定精度和适用范围。一、立体视觉测量基础立体视觉测量的基础是双目视觉原理。当物体被两个摄像机同时拍摄时,每个摄像机拍摄到的图像都会有一些共同的像素点。这些共同的像素点对应于物体上的同一点,在相机坐标系下

一种基于双目立体视觉的立体标定方法.docx
一种基于双目立体视觉的立体标定方法基于双目立体视觉的立体标定方法摘要:双目立体视觉系统是一种通过采集左右两个相机的图像来实现三维重构和深度测量的技术。立体标定是双目立体视觉系统中的一个关键步骤,其目的是确定两个相机之间的空间几何关系,以便实现准确的深度测量和三维重构。本文介绍了一种基于双目立体视觉的立体标定方法,包括相机标定和立体匹配算法。实验结果表明,该方法能够实现高精度的立体重建和深度测量。关键词:双目立体视觉、立体标定、相机标定、立体匹配1.引言双目立体视觉是一种通过采集左右两个相机图像来实现三维重

基于双结构光视觉的机器人运动学参数标定方法.docx
基于双结构光视觉的机器人运动学参数标定方法基于双结构光视觉的机器人运动学参数标定方法摘要:机器人运动学参数标定是机器人研究中的重要问题,对于保证机器人运动控制的精度和稳定性具有重要意义。传统的运动学参数标定方法需要在特定的实验环境下进行,且要求复杂的传感器设备,同时需要耗费大量的时间和精力。本文提出了一种基于双结构光视觉的机器人运动学参数标定方法,利用结构光和视觉传感器进行标定,不仅可以实现对机器人运动学参数的高精度标定,而且具有简洁、快速的特点。实验证明,本方法能够有效地提高机器人运动控制的精度和稳定性