
基于改进UNet模型的油茶果振动采摘点定位方法.docx

92****sc


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进UNet模型的油茶果振动采摘点定位方法.docx
基于改进UNet模型的油茶果振动采摘点定位方法目录一、内容简述................................................21.1研究背景.............................................21.2研究目的与意义.......................................3二、相关工作................................................42.1UNet模型及其在农业领域的

基于改进灰狼算法的油茶果采摘机械臂轨迹规划.docx
基于改进灰狼算法的油茶果采摘机械臂轨迹规划基于改进灰狼算法的油茶果采摘机械臂轨迹规划摘要:本文基于改进灰狼算法,针对油茶果采摘机械臂的轨迹规划问题展开研究。通过对机械臂运动规划的分析和调研,将问题抽象为一个优化问题,以实现对油茶果的高效采摘。通过改进灰狼算法,实现了机械臂的轨迹规划,并结合实验结果验证了改进算法的有效性和可行性。关键词:改进灰狼算法;油茶果采摘;机械臂;轨迹规划1.引言油茶果的采摘是一项繁琐而费时的工作,传统的人工采摘无法满足大规模油茶果园的需求。因此,研究一种高效的油茶果采摘机械臂轨迹规
一种油茶果采摘结构及油茶果采摘机.pdf
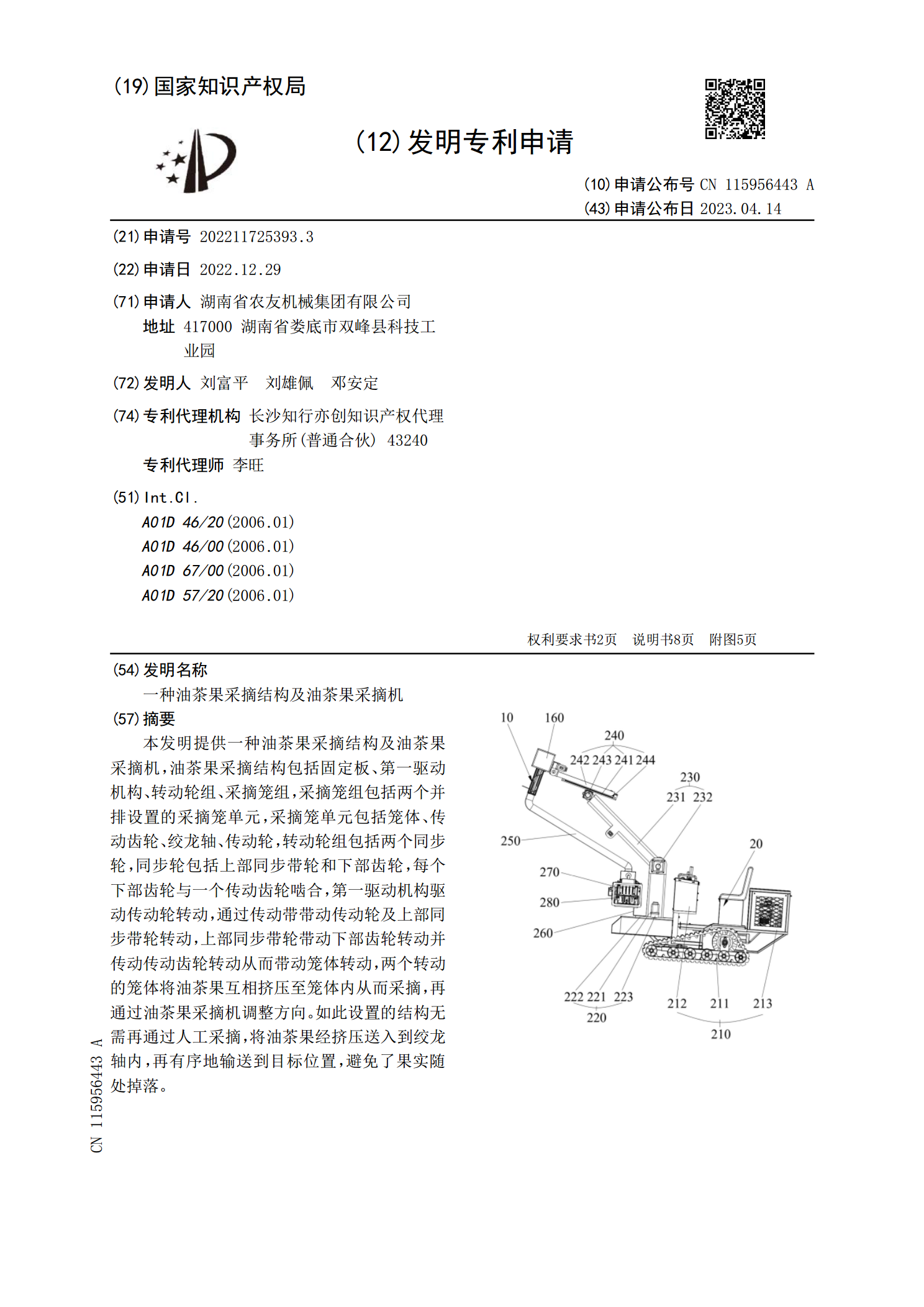
本发明提供一种油茶果采摘结构及油茶果采摘机,油茶果采摘结构包括固定板、第一驱动机构、转动轮组、采摘笼组,采摘笼组包括两个并排设置的采摘笼单元,采摘笼单元包括笼体、传动齿轮、绞龙轴、传动轮,转动轮组包括两个同步轮,同步轮包括上部同步带轮和下部齿轮,每个下部齿轮与一个传动齿轮啮合,第一驱动机构驱动传动轮转动,通过传动带带动传动轮及上部同步带轮转动,上部同步带轮带动下部齿轮转动并传动传动齿轮转动从而带动笼体转动,两个转动的笼体将油茶果互相挤压至笼体内从而采摘,再通过油茶果采摘机调整方向。如此设置的结构无需再通过
一种基于油茶种植用油茶果采摘装置.pdf
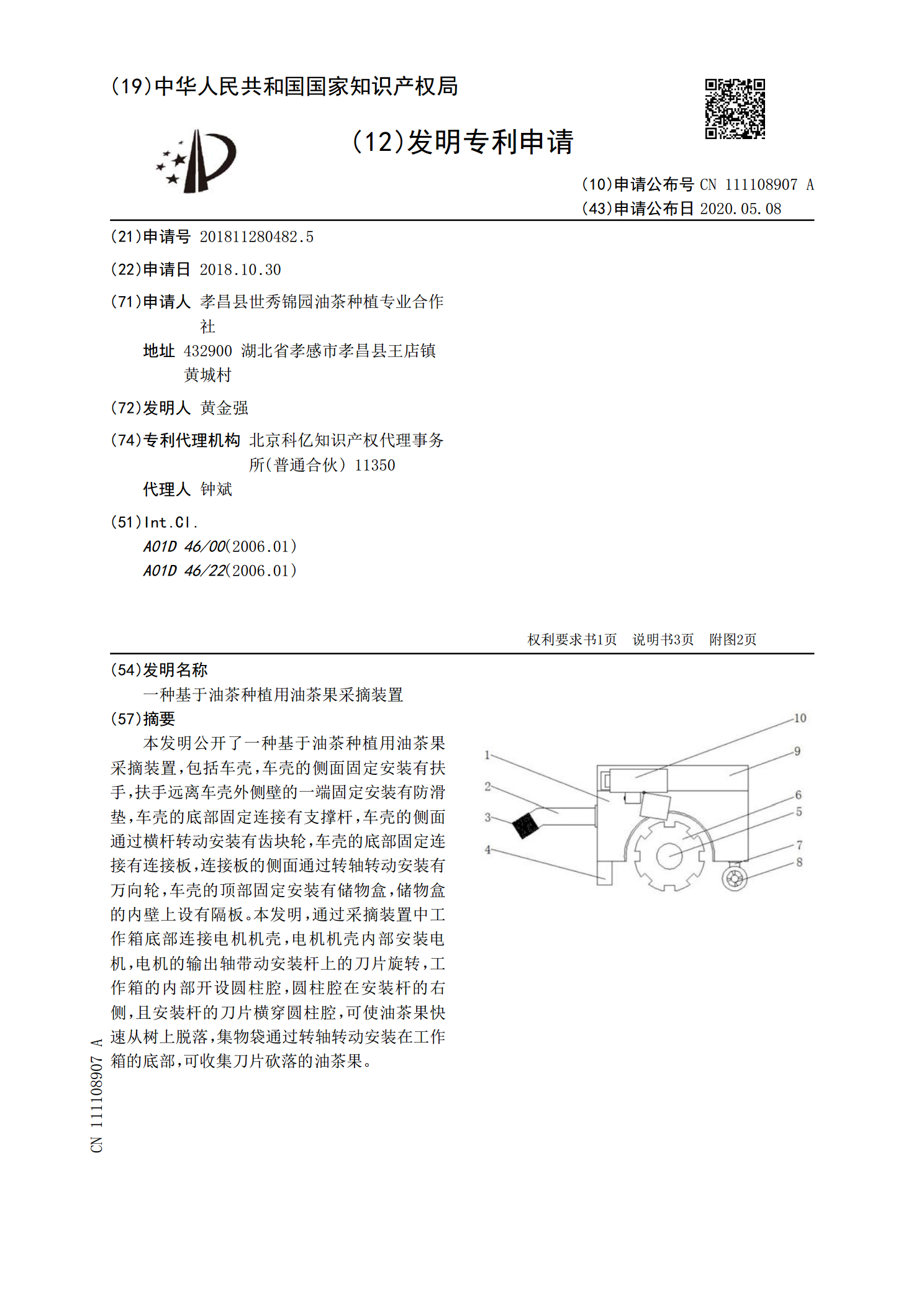
本发明公开了一种基于油茶种植用油茶果采摘装置,包括车壳,车壳的侧面固定安装有扶手,扶手远离车壳外侧壁的一端固定安装有防滑垫,车壳的底部固定连接有支撑杆,车壳的侧面通过横杆转动安装有齿块轮,车壳的底部固定连接有连接板,连接板的侧面通过转轴转动安装有万向轮,车壳的顶部固定安装有储物盒,储物盒的内壁上设有隔板。本发明,通过采摘装置中工作箱底部连接电机机壳,电机机壳内部安装电机,电机的输出轴带动安装杆上的刀片旋转,工作箱的内部开设圆柱腔,圆柱腔在安装杆的右侧,且安装杆的刀片横穿圆柱腔,可使油茶果快速从树上脱落,集

基于改进凸壳理论的遮挡油茶果定位检测算法.docx
基于改进凸壳理论的遮挡油茶果定位检测算法基于改进凸壳理论的遮挡油茶果定位检测算法摘要:油茶果是一种重要的经济作物,对于准确地定位和检测油茶果起着重要作用。然而,油茶果在生长过程中容易被叶片遮挡,给果实的定位和检测带来了一定的挑战。本文基于改进凸壳理论,提出了一种遮挡油茶果定位检测算法,通过对图像的分割和特征提取,采用改进的凸壳算法进行果实的定位和检测。实验证明,该算法能够有效地提高油茶果的定位和检测的准确性和鲁棒性。关键词:遮挡油茶果;定位检测;凸壳理论;分割;特征提取1.引言油茶果是一种重要的油料作物,