
[优选文档]-典型型系统PPT.ppt

天马****23

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共84页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

[优选文档]-典型型系统PPT.ppt
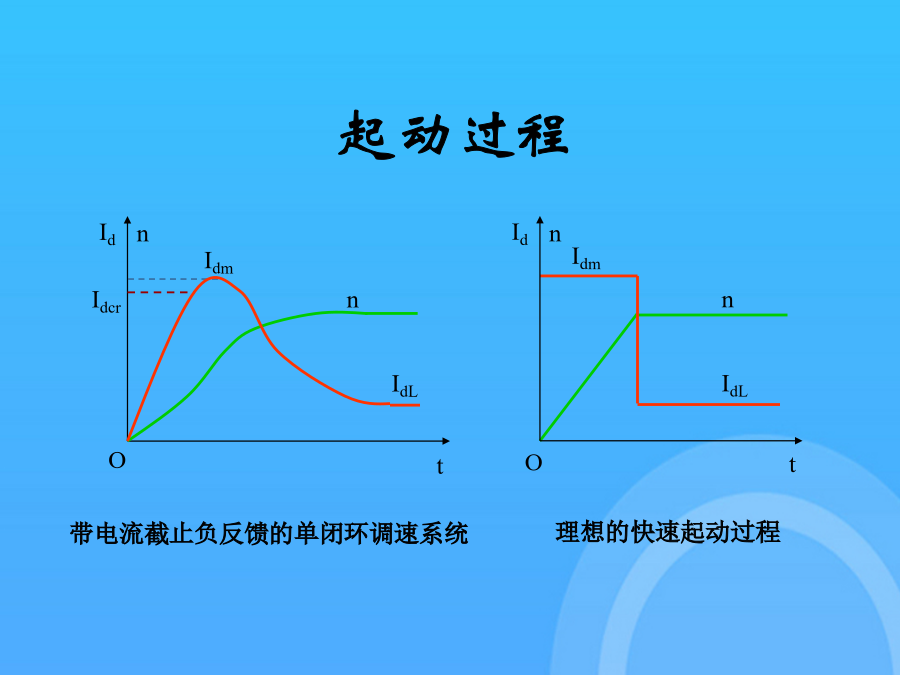
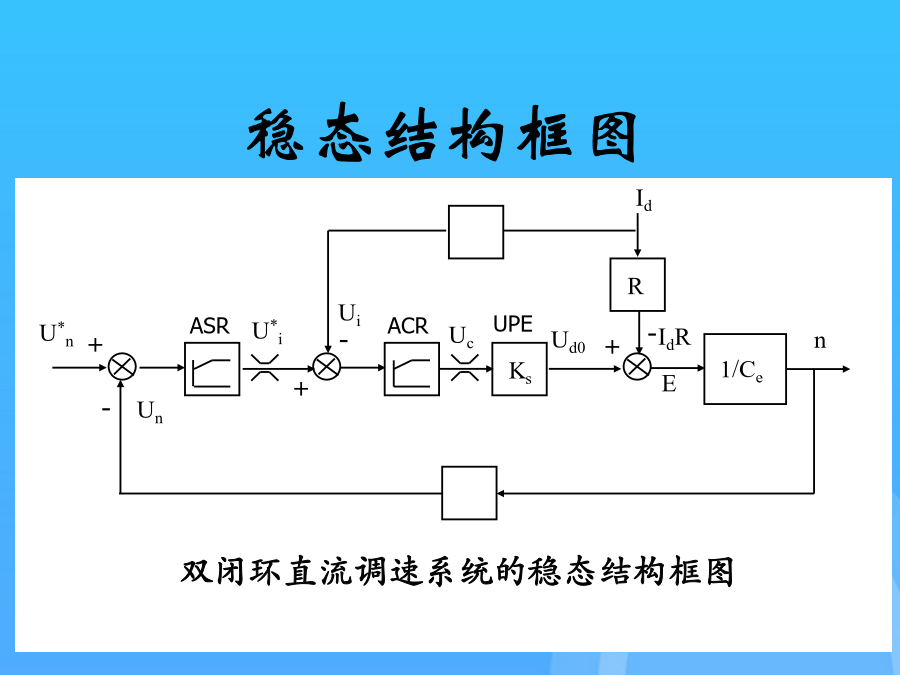
典型型系统典型型系统主要内容一、双闭环调速系统及其静特性理想的快速起动过程希望能实现的控制+双闭环直流调速系统的稳态结构框图—转速反馈系数—电流反馈系数调节器输出限幅的作用静特性(1)转速调节器不饱和各变量的稳态工作点和稳态参数计算PI调节器的特点反馈系数计算U*n起动过程分析双闭环直流调速系统起动过程的特点动态抗扰性能分析2.抗电网电压扰动转速和电流两个调节器的作用2.电流调节器的作用三、调节器的工程设计方法工程设计方法的基本思路调节器结构的选择典型I型系统典型Ⅱ型系统控制系统的动态性能指标在典型

[优选文档]典型汽车液压系统PPT.ppt
典型汽车液压系统典型汽车液压系统一汽车基础知识发动机底盘电气设备二、典型汽车液压系统分析油液→粗过滤器2→液压泵3→换向阀5右一位→过滤器9→油箱1。动动轮缸需要“保持”制动压力调节装置主要由调压电磁阀12总成、电动泵总成13和储液器11等组成一个独立的整体。4、放松方向盘:阀5恢复中间位置,助力作用消失。制动压力时,根据ECU根据ECU的指令,电磁线圈不通电,电磁线圈没有电流,电磁阀中的柱塞处于右图位置,制动主缸与制动轮缸的管路经电磁阀相连通,液压泵不工作,这样来自制动主缸的制动液就经电磁阀进入制动轮缸

[优选文档]型车床PPT.ppt
型车床(优选)型车床普通车床是最常见的一种机床,约占机床总数的20~35%,其电气控制系统较简单。主要用于加工各种回转体表面。一、车床用途:卡盘2、运动形式:五、电气控制线路分析:(1)主运动:主轴通过卡盘或顶尖带动工件的旋转运动。三、车床主要结构及运动形式(3)辅助运动:刀架的快速移动、工件的加紧与放松等。(2)进给运动:溜板带动刀架的纵向或横向的直线运动。(2)进给运动:溜板带动刀架的纵向或横向的直线运动。C6150普通车床是最常见的一种机床,约占机床总数的20~35%,其电气控制系统较简单。KM3得

典型型系统ppt课件.ppt
转速、电流双闭环直流调速系统和调节器的工程设计方法主要内容一、双闭环调速系统及其静特性理想的快速起动过程希望能实现的控制+双闭环直流调速系统的稳态结构框图—转速反馈系数—电流反馈系数调节器输出限幅的作用静特性(1)转速调节器不饱和各变量的稳态工作点和稳态参数计算PI调节器的特点反馈系数计算U*n起动过程分析双闭环直流调速系统起动过程的特点动态抗扰性能分析2.抗电网电压扰动转速和电流两个调节器的作用2.电流调节器的作用三、调节器的工程设计方法工程设计方法的基本思路调节器结构的选择典型I型系统典型Ⅱ型系

典型Ⅱ型系统ppt课件.ppt
转速、电流双闭环直流调速系统和调节器的工程设计方法主要内容一、双闭环调速系统及其静特性理想的快速起动过程希望能实现的控制+双闭环直流调速系统的稳态结构框图—转速反馈系数—电流反馈系数调节器输出限幅的作用静特性(1)转速调节器不饱和各变量的稳态工作点和稳态参数计算PI调节器的特点反馈系数计算U*n起动过程分析双闭环直流调速系统起动过程的特点动态抗扰性能分析2.抗电网电压扰动转速和电流两个调节器的作用2.电流调节器的作用三、调节器的工程设计方法工程设计方法的基本思路调节器结构的选择典型I型系统典型Ⅱ型系