
一种基于多模态多时间尺度的步态识别方法.pdf

波峻****99

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多模态多时间尺度的步态识别方法.pdf
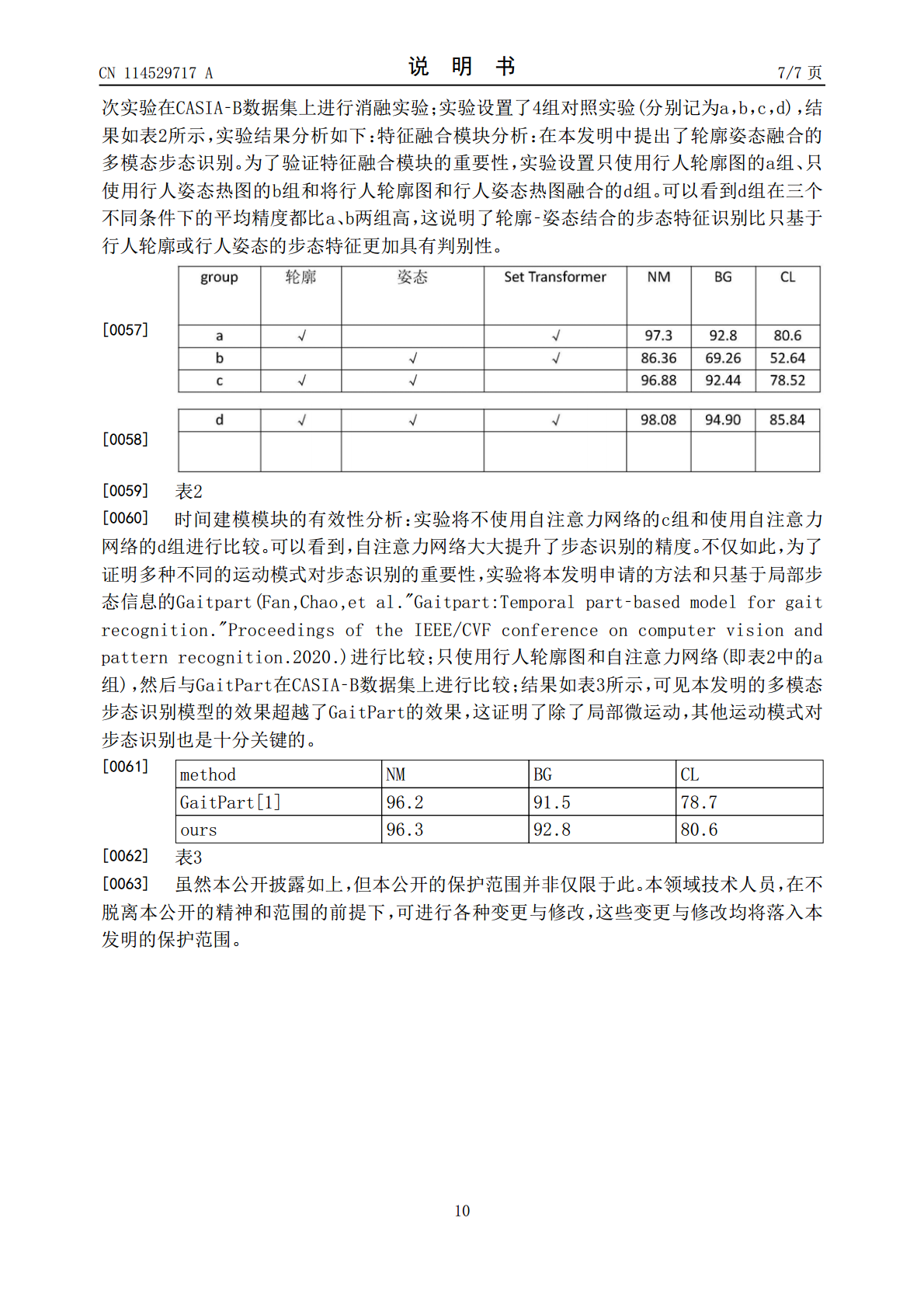
本发明涉及一种基于多模态多时间尺度的步态识别方法,采用结合行人轮廓图和行人姿态热图能够有效降低行人换装对步态识别的影响;同时采用自注意网络提取所有帧局部步态特征块序列之间同一序列位置的多时间尺度的局部特征特征块,充分挖掘行走序列所有帧之间步态特征的依赖关系,进而提升步态识别的准确率。

一种多视角多状态的步态识别方法.pdf
本发明提出一种多视角多状态的步态识别方法,包括:对训练集里步态视频进行轮廓提取和时间同步,建立表象期望值、视角、状态和身份之间的投影关系;对原型集人体步态轮廓序列进行视角估计,从表象期望值、视角、状态、身份之间的投影关系获得身份信息;对测试集里人体步态轮廓序列进行视角估计,从训练集中的表象期望值、视角、状态、身份之间的投影关系获得身份信息,与原型集里已有的所有身份向量进行比对,判断得到是原型集中的哪一个人。与现有的基于整个步态周期的方法不同,本发明以单个状态作为最小单位,更加准确的建模步态运动的变化过程并

一种基于模态融合的步态识别方法.pdf
本发明提供一种基于模态融合的步态识别方法,属于模式识别技术领域,为解决现有步态识别技术受光照条件以及复杂背景或协变量影响较大,导致轮廓图提取不准确,从而影响识别精度以及由于缺少人体基本属性信息而使其特征表达能力受到限制,同时由于关键点序列是非结构化数据,难以用深度网络进行建模,多采用凭经验人工设计特征的方法,无法最大化挖掘有效的判别特征,影响识别准确率及泛化能力的问题。本发明采用模态融合方式,将具有互补性的人体关键点特征和步态轮廓图特征进行模态融合。人体关键点序列输入图卷积神经网络,提取基于骨架信息的步态
基于多模态的情绪识别方法.pdf
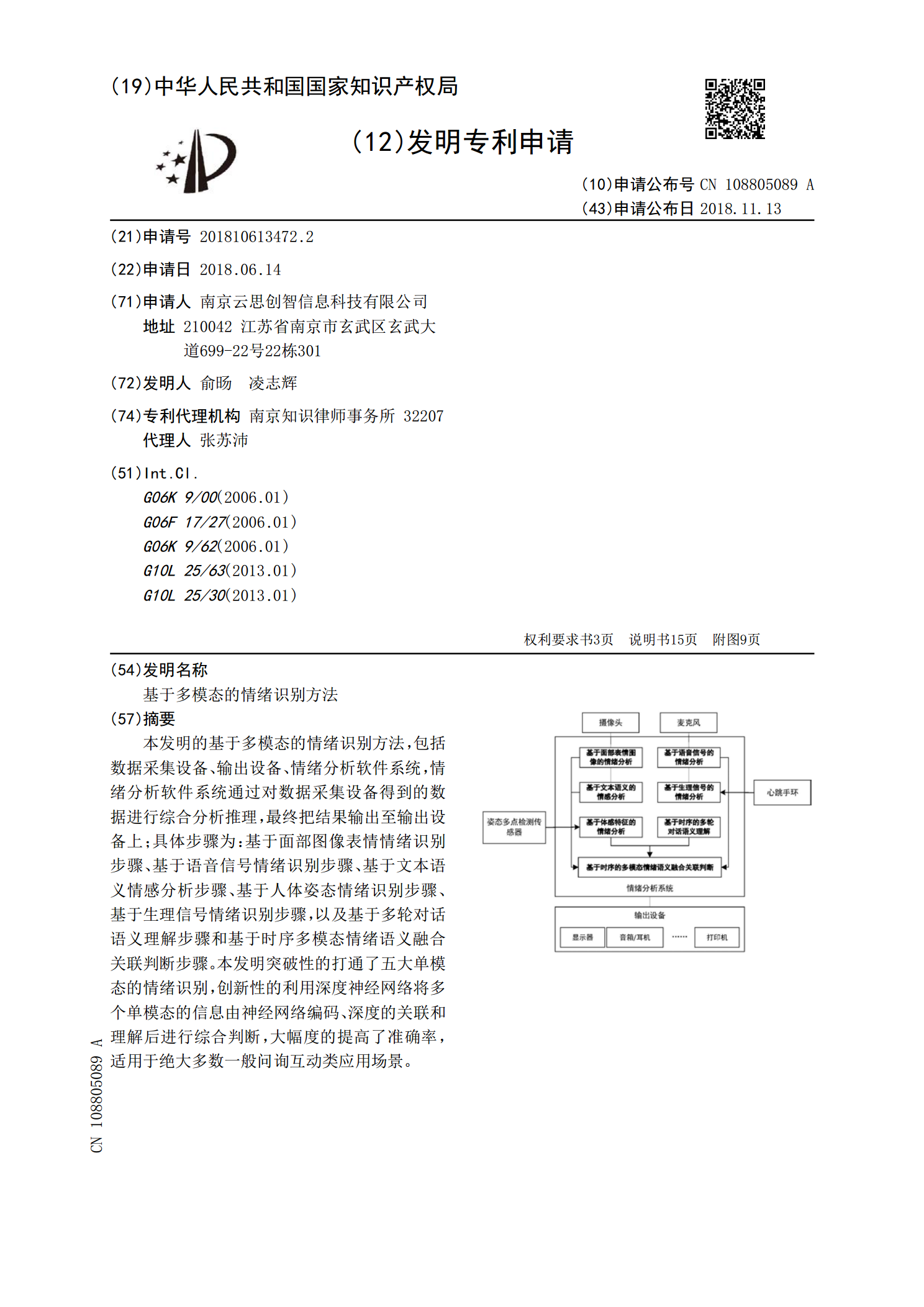
本发明的基于多模态的情绪识别方法,包括数据采集设备、输出设备、情绪分析软件系统,情绪分析软件系统通过对数据采集设备得到的数据进行综合分析推理,最终把结果输出至输出设备上;具体步骤为:基于面部图像表情情绪识别步骤、基于语音信号情绪识别步骤、基于文本语义情感分析步骤、基于人体姿态情绪识别步骤、基于生理信号情绪识别步骤,以及基于多轮对话语义理解步骤和基于时序多模态情绪语义融合关联判断步骤。本发明突破性的打通了五大单模态的情绪识别,创新性的利用深度神经网络将多个单模态的信息由神经网络编码、深度的关联和理解后进行综
一种基于多视角融合的步态识别方法及系统.pdf
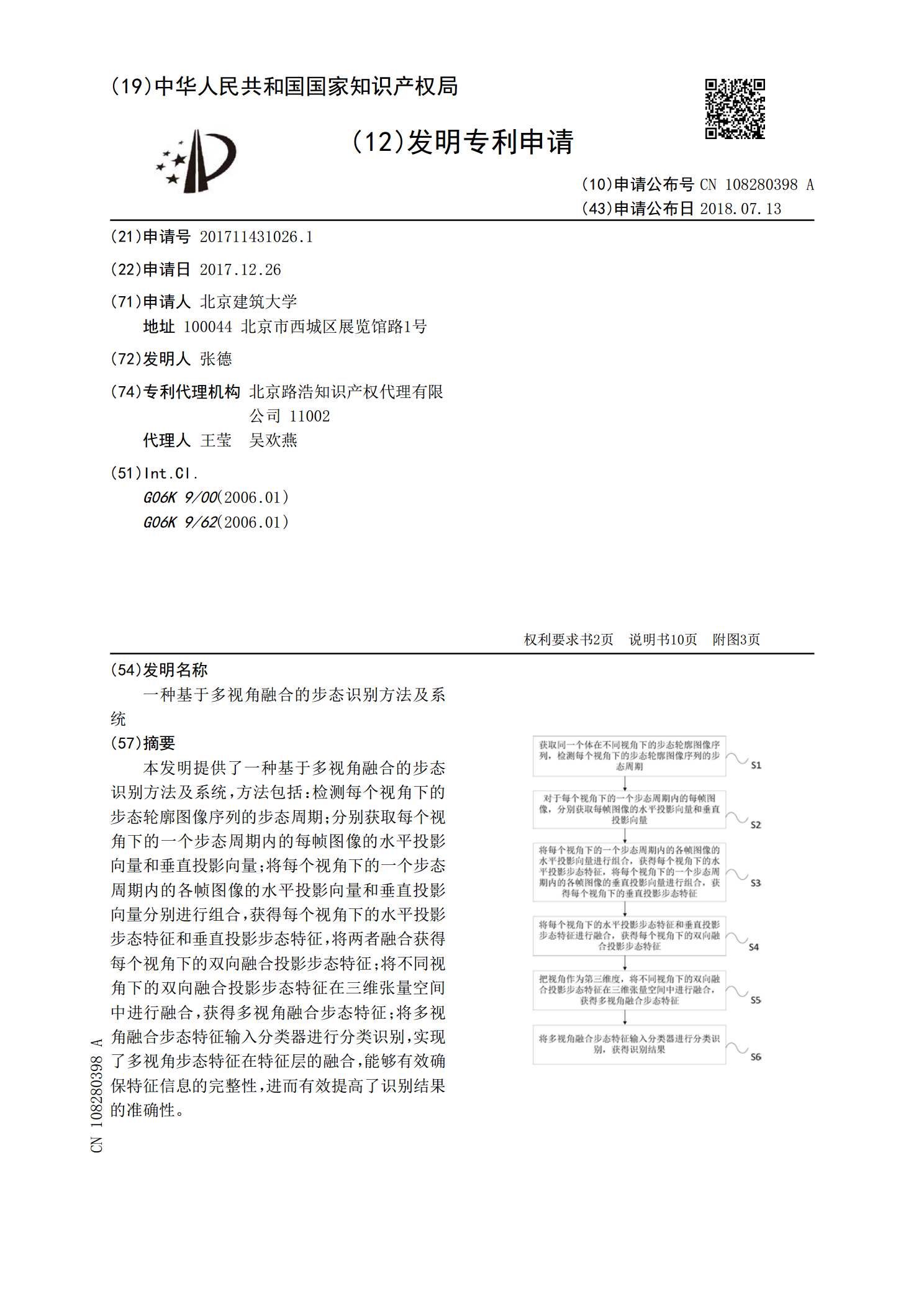
本发明提供了一种基于多视角融合的步态识别方法及系统,方法包括:检测每个视角下的步态轮廓图像序列的步态周期;分别获取每个视角下的一个步态周期内的每帧图像的水平投影向量和垂直投影向量;将每个视角下的一个步态周期内的各帧图像的水平投影向量和垂直投影向量分别进行组合,获得每个视角下的水平投影步态特征和垂直投影步态特征,将两者融合获得每个视角下的双向融合投影步态特征;将不同视角下的双向融合投影步态特征在三维张量空间中进行融合,获得多视角融合步态特征;将多视角融合步态特征输入分类器进行分类识别,实现了多视角步态特征在