
基于变杆长的双行星架非圆齿轮系移栽机构设计方法.pdf

骊英****bb

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于变杆长的双行星架非圆齿轮系移栽机构设计方法.pdf
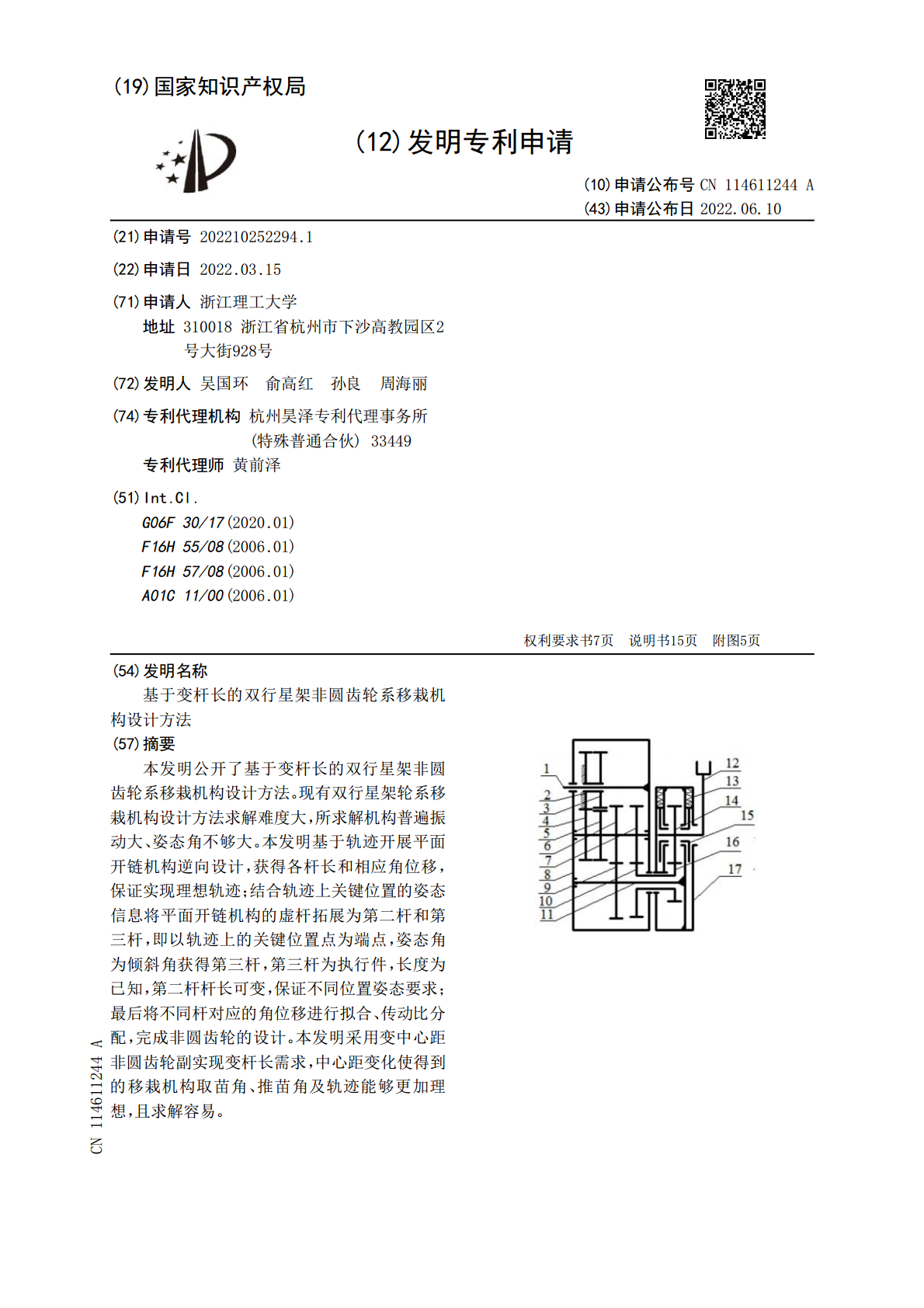
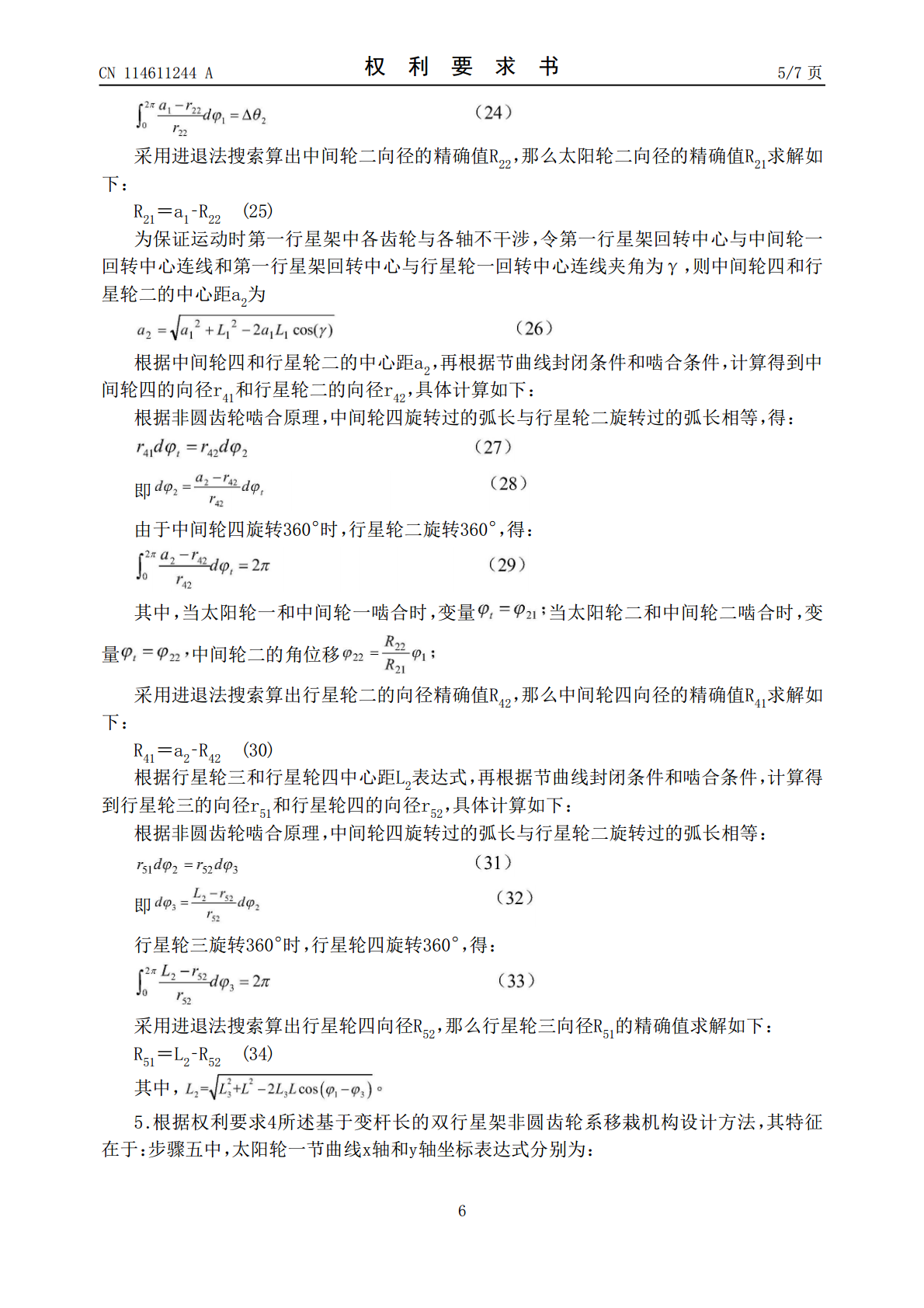
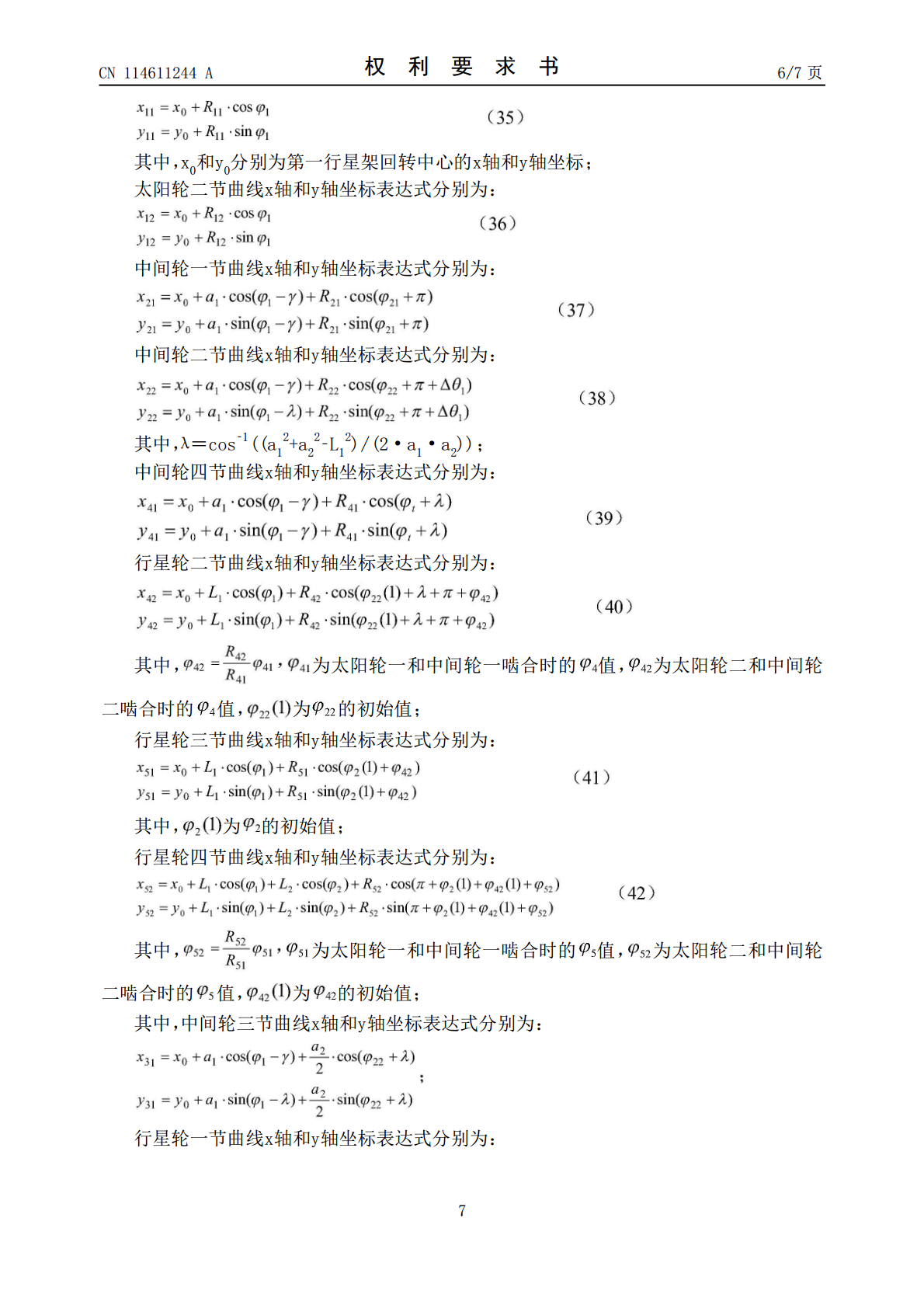
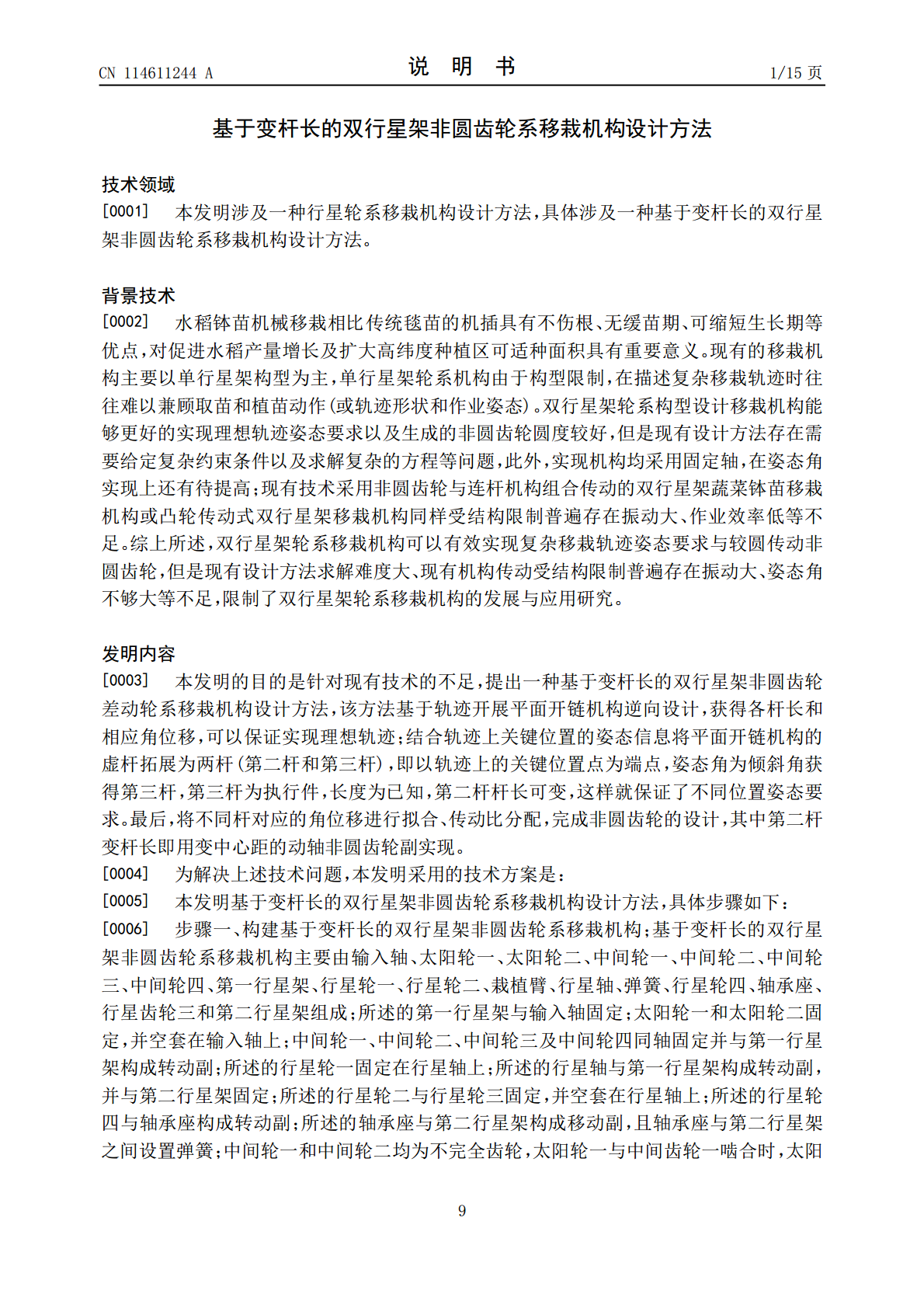
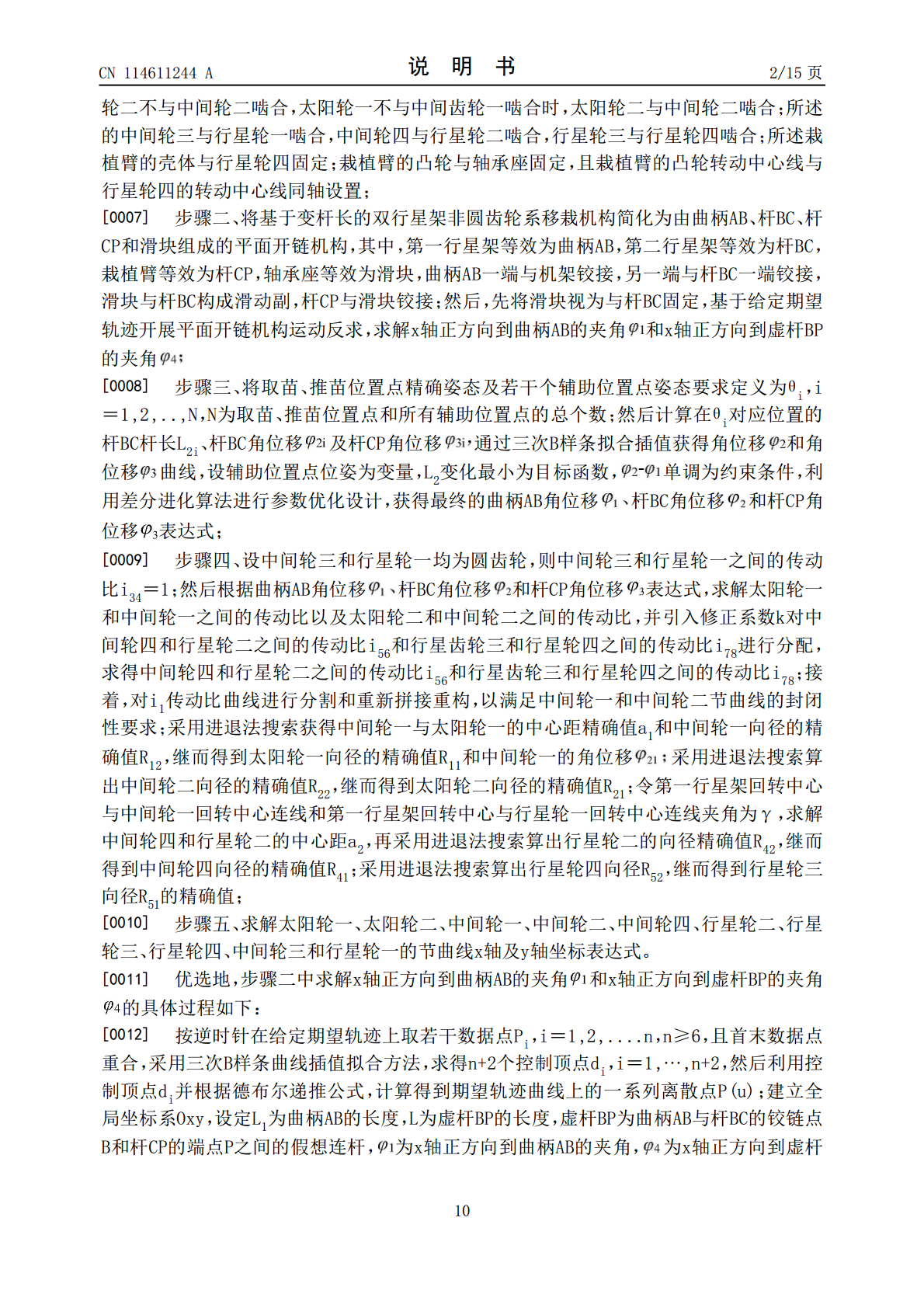
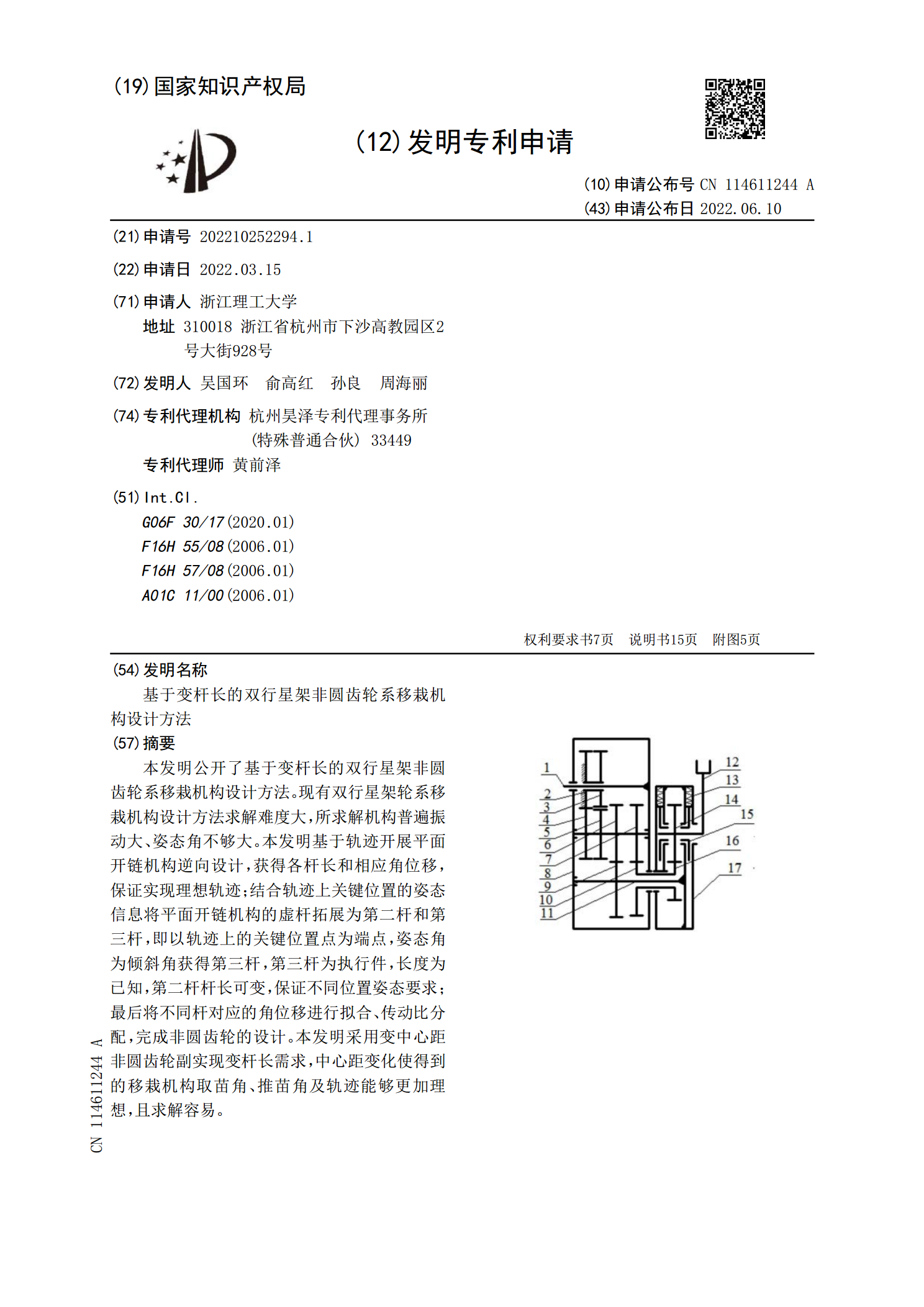
本发明公开了基于变杆长的双行星架非圆齿轮系移栽机构设计方法。现有双行星架轮系移栽机构设计方法求解难度大,所求解机构普遍振动大、姿态角不够大。本发明基于轨迹开展平面开链机构逆向设计,获得各杆长和相应角位移,保证实现理想轨迹;结合轨迹上关键位置的姿态信息将平面开链机构的虚杆拓展为第二杆和第三杆,即以轨迹上的关键位置点为端点,姿态角为倾斜角获得第三杆,第三杆为执行件,长度为已知,第二杆杆长可变,保证不同位置姿态要求;最后将不同杆对应的角位移进行拟合、传动比分配,完成非圆齿轮的设计。本发明采用变中心距非圆齿轮副实
双行星架式圆齿轮‑非圆齿轮行星轮系钵苗移栽机构.pdf
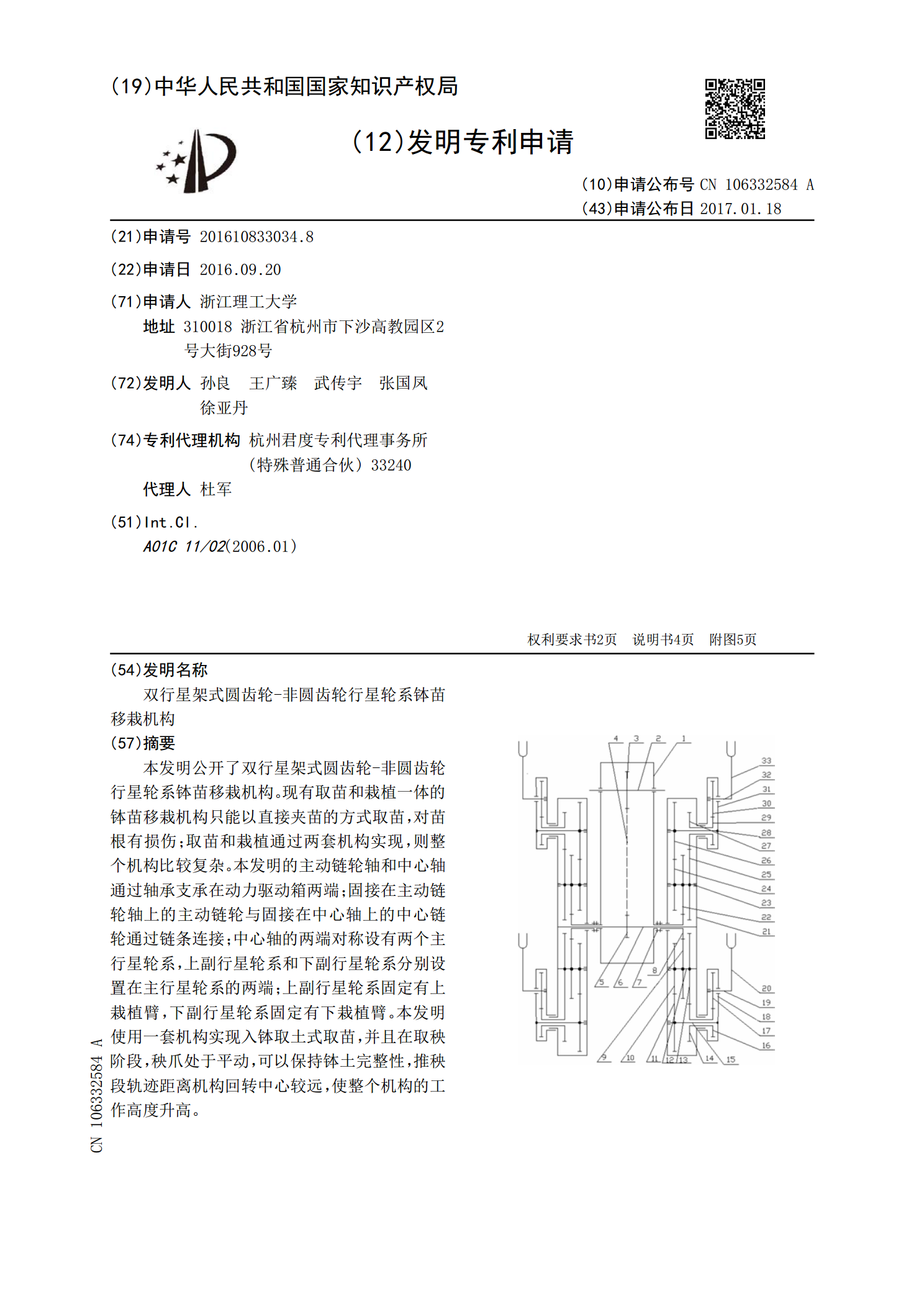
本发明公开了双行星架式圆齿轮‑非圆齿轮行星轮系钵苗移栽机构。现有取苗和栽植一体的钵苗移栽机构只能以直接夹苗的方式取苗,对苗根有损伤;取苗和栽植通过两套机构实现,则整个机构比较复杂。本发明的主动链轮轴和中心轴通过轴承支承在动力驱动箱两端;固接在主动链轮轴上的主动链轮与固接在中心轴上的中心链轮通过链条连接;中心轴的两端对称设有两个主行星轮系,上副行星轮系和下副行星轮系分别设置在主行星轮系的两端;上副行星轮系固定有上栽植臂,下副行星轮系固定有下栽植臂。本发明使用一套机构实现入钵取土式取苗,并且在取秧阶段,秧爪处

非圆齿轮双行星轮系钵苗移栽机构.pdf
本发明公开了一种非圆齿轮双行星轮系钵苗移栽机构。现有取苗和栽植一体的钵苗移栽机构只能以直接夹苗的方式取苗,对苗根有损伤;取苗和栽植通过两套机构实现,则整个机构比较复杂。本发明的主动链轮轴和中心轴通过轴承支承在动力驱动箱两端;固接在主动链轮轴上的主动链轮与固接在中心轴上的中心链轮通过链条连接;中心轴的两端对称设有两个主行星轮系,上副行星轮系和下副行星轮系分别设置在主行星轮系的两端;上副行星轮系固定有上栽植臂,下副行星轮系固定有下栽植臂。本发明使用一套机构实现入钵取土式取苗,并且在取秧阶段,秧爪处于平动,可以

双行星架式非圆—椭圆齿轮行星轮系钵苗移栽机构.pdf
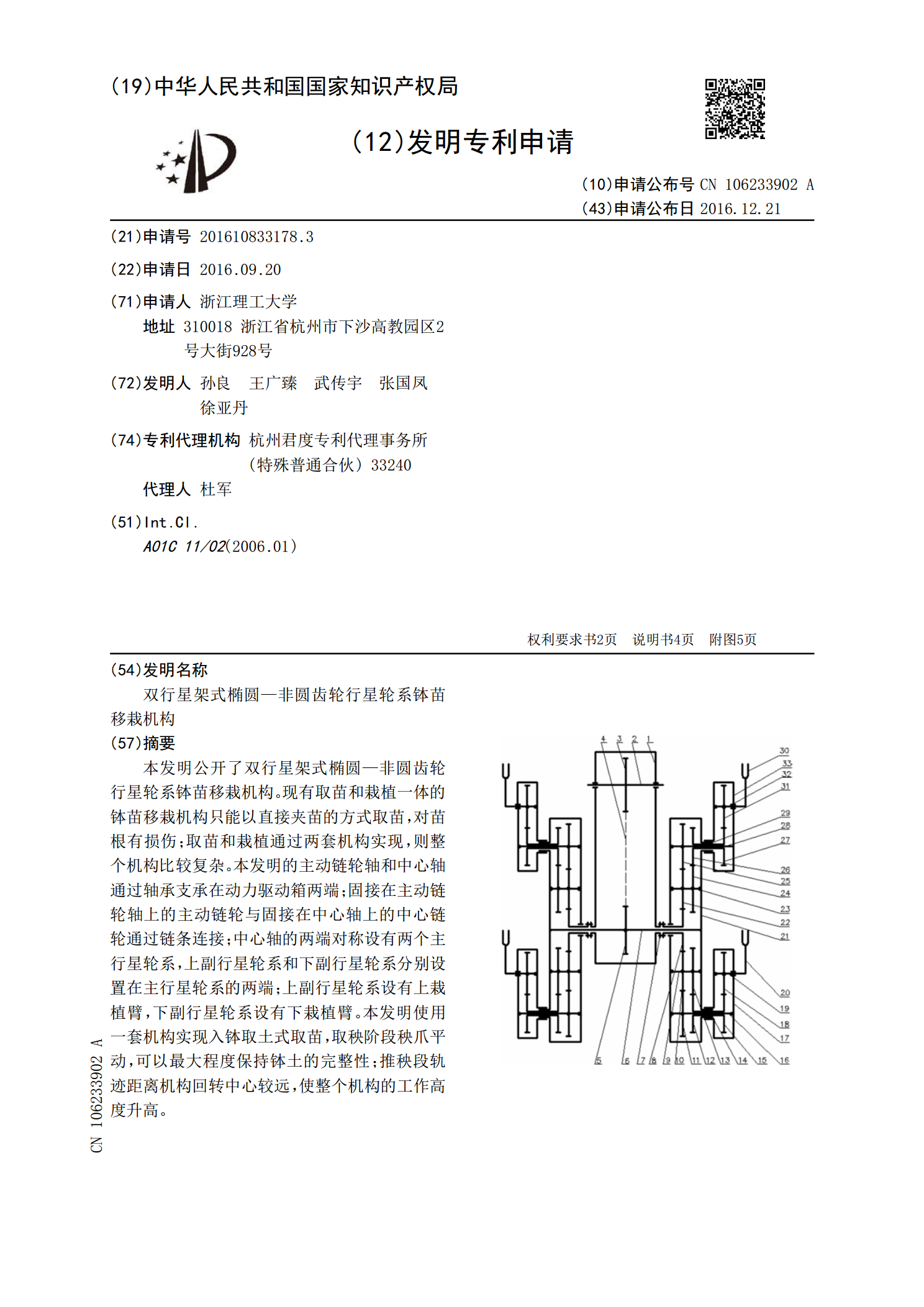
本发明公开了双行星架式非圆—椭圆齿轮行星轮系钵苗移栽机构。现有取苗和栽植一体的钵苗移栽机构只能以直接夹苗的方式取苗,对苗根有损伤;取苗和栽植通过两套机构实现则比较复杂。本发明的主动链轮轴和中心轴通过轴承支承在动力驱动箱两端;固接在主动链轮轴上的主动链轮与固接在中心轴上的中心链轮通过链条连接;中心轴的两端对称设有两个主行星轮系,上副行星轮系和下副行星轮系分别设置在主行星轮系两端;上副行星轮系设有上栽植臂,下副行星轮系设有下栽植臂。本发明使用一套机构实现入钵取土式取苗,在取秧阶段秧爪处于平动,可以保持钵土完整
双行星架式椭圆—非圆齿轮行星轮系钵苗移栽机构.pdf
本发明公开了双行星架式椭圆—非圆齿轮行星轮系钵苗移栽机构。现有取苗和栽植一体的钵苗移栽机构只能以直接夹苗的方式取苗,对苗根有损伤;取苗和栽植通过两套机构实现,则整个机构比较复杂。本发明的主动链轮轴和中心轴通过轴承支承在动力驱动箱两端;固接在主动链轮轴上的主动链轮与固接在中心轴上的中心链轮通过链条连接;中心轴的两端对称设有两个主行星轮系,上副行星轮系和下副行星轮系分别设置在主行星轮系的两端;上副行星轮系设有上栽植臂,下副行星轮系设有下栽植臂。本发明使用一套机构实现入钵取土式取苗,取秧阶段秧爪平动,可以最大程