
数字信号处理实验报告.doc

sy****28


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
数字信号处理实验报告.doc
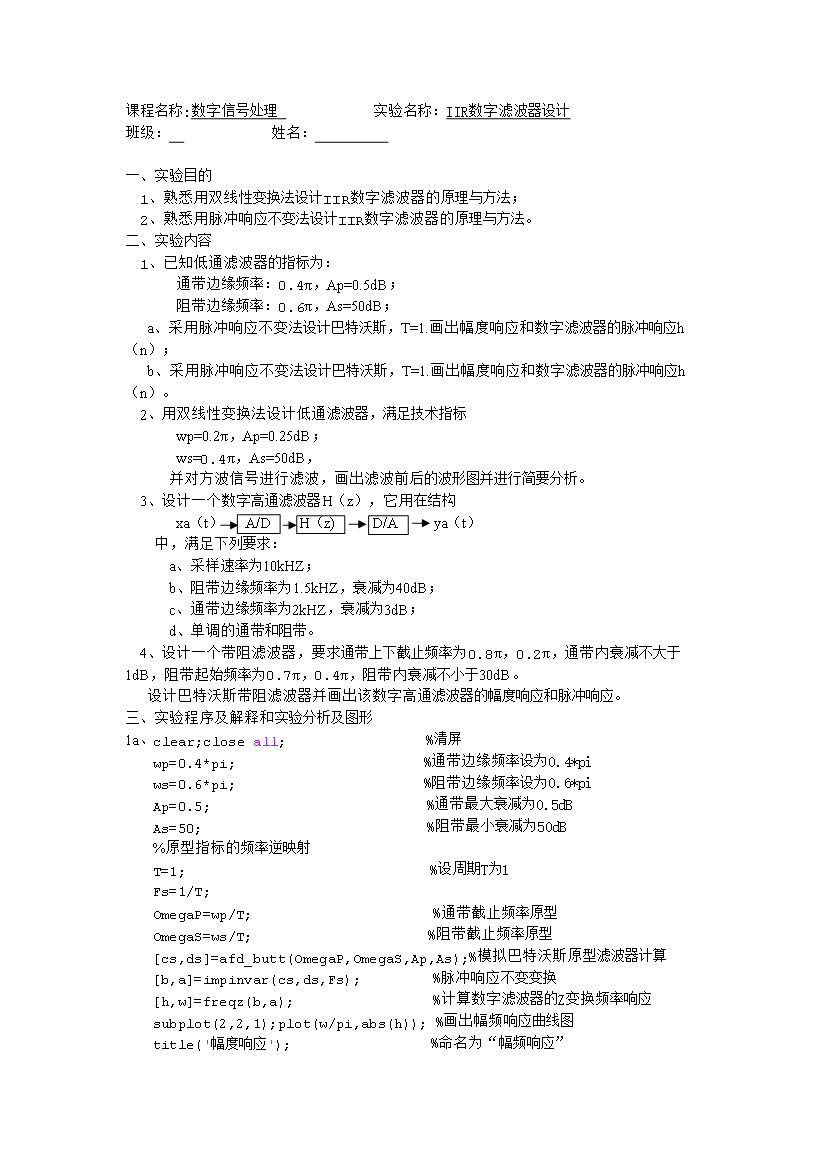
课程名称:数字信号处理实验名称:IIR数字滤波器设计班级:姓名:实验目的1、熟悉用双线性变换法设计IIR数字滤波器的原理与方法;2、熟悉用脉冲响应不变法设计IIR数字滤波器的原理与方法。实验内容1、已知低通滤波器的指标为:通带边缘频率:0.4πAp=0.5dB;阻带边缘频率:0.6πAs=50dB;a、采用脉冲响应不变法设计巴特沃斯T=1.画出幅度响应和数字滤波器的脉冲响应h(n);
数字信号处理实验报告.doc
课程名称:数字信号处理实验名称:IIR数字滤波器设计班级:姓名:实验目的1、熟悉用双线性变换法设计IIR数字滤波器的原理与方法;2、熟悉用脉冲响应不变法设计IIR数字滤波器的原理与方法。实验内容1、已知低通滤波器的指标为:通带边缘频率:0.4πAp=0.5dB;阻带边缘频率:0.6πAs=50dB;a、采用脉冲响应不变法设计巴特沃斯T=1.画出幅度响应和数字滤波器的脉冲响应h(n);

数字信号处理实验报告.doc
实验报告云南大学信息学院一、实验目的1.学习因果稳定系统线性时不变离散时间系统的分析。2.学习近似实现的理想滤波器的一些性质。二、实验内容1.Matlab计算画出线性时不变离散时间系统的频率响应,分析相关性质。2.Matlab设计滤波器,求冲激响应,分析相关性质。三、主要算法与程序Q4.2滤波器及其相关的性能;部分程序如下:本题主要是根据要求生成两个不同的滤波器,判断其性能;滤波器的稳定性是判断滤波器的质量指标,而判断其极点是否在单位圆能,极点在单位圆则滤波器稳定。w=0:8*pi/511:pi;num=

数字信号处理实验报告.docx
实验一信号、系统及系统响应实验目的1、熟悉连续信号经理想采样前后的频谱变化关系,加深对时域采样定的理解。2、熟悉时域离散系统的时域特性。3、利用卷积方法观察分析系统的时域特性。4、掌握序列傅里叶变换的计算机实现方法,利用序列的傅里叶变换对连续信号、离散信号及系统响应进行频域分析。二、实验原理采样的的过程既是连续信号离散化的过程。采用单位冲击串进行采样,为使采样信号能不失真的还原为采样前的信号,根据奈奎斯特采样率,采样频率应该大于信号最高频率的2倍。因为时域的采样既是对时域的离散化处理,时域离散频域会进行周

数字信号处理实验报告.doc
数字信号处理实验报告实验一信号(模拟、数字)得输入输出实验(常见离散信号产生与实现)一、实验目得1.加深对常用离散信号得理解;2.掌握matlab中一些基本函数得建立方法。二、实验原理1、单位抽样序列在MATLAB中可以利用zeros()函数实现。如果在时间轴上延迟了k个单位,得到即:2.单位阶跃序列在MATLAB中可以利用ones()函数实现。x=ones(1,N)3.正弦序列在MATLAB中,n=0:N-1;x=A*sin(2*pi*f*n/Fs+fai)4.复指数序列在MATLAB中,n=0:N-1