
一种变转速传动机构及其倾转旋翼机的模式适应装置.pdf

Do****76


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种变转速传动机构及其倾转旋翼机的模式适应装置.pdf
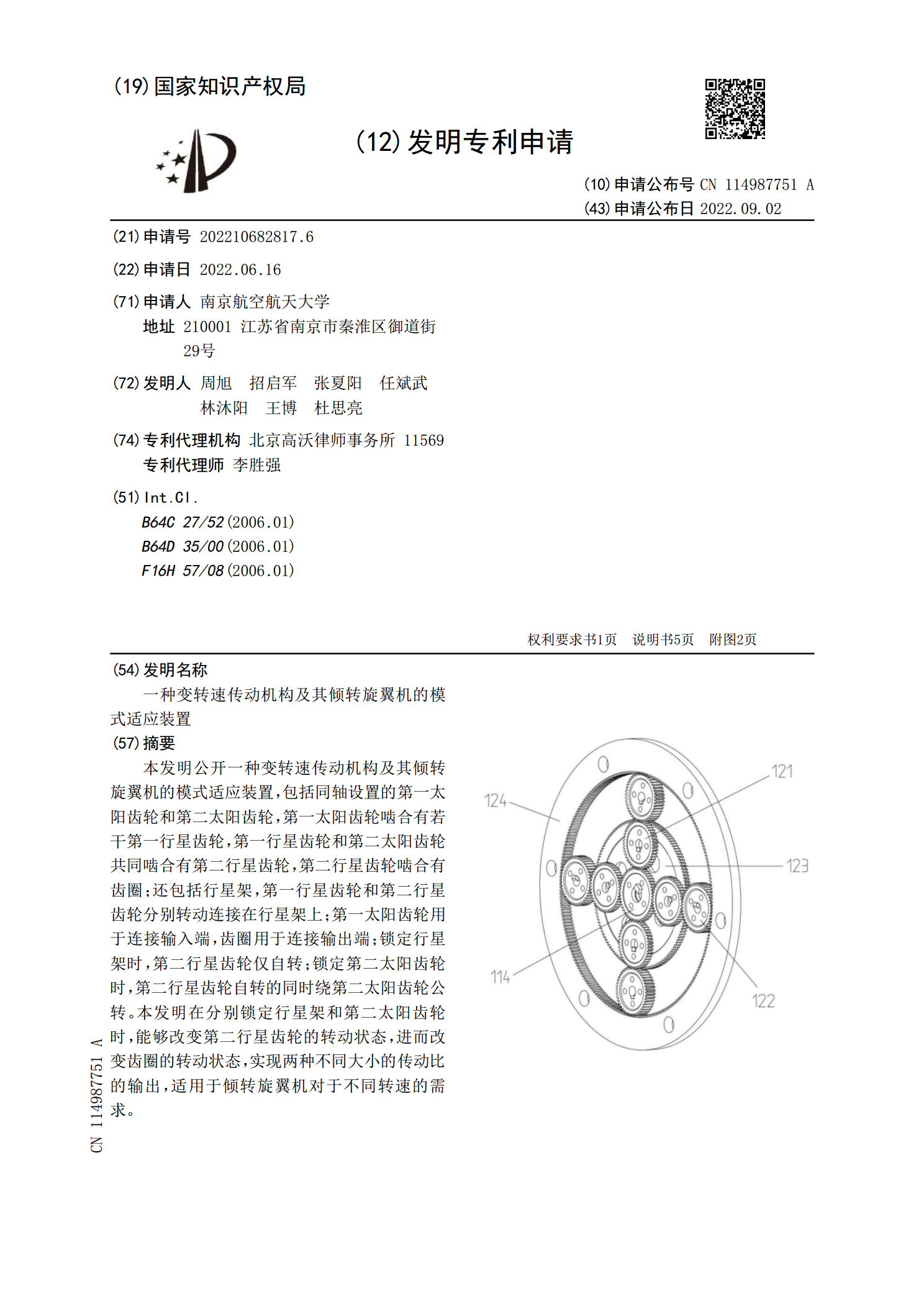
本发明公开一种变转速传动机构及其倾转旋翼机的模式适应装置,包括同轴设置的第一太阳齿轮和第二太阳齿轮,第一太阳齿轮啮合有若干第一行星齿轮,第一行星齿轮和第二太阳齿轮共同啮合有第二行星齿轮,第二行星齿轮啮合有齿圈;还包括行星架,第一行星齿轮和第二行星齿轮分别转动连接在行星架上;第一太阳齿轮用于连接输入端,齿圈用于连接输出端;锁定行星架时,第二行星齿轮仅自转;锁定第二太阳齿轮时,第二行星齿轮自转的同时绕第二太阳齿轮公转。本发明在分别锁定行星架和第二太阳齿轮时,能够改变第二行星齿轮的转动状态,进而改变齿圈的转动状
倾转旋翼机动力传动机构.pdf
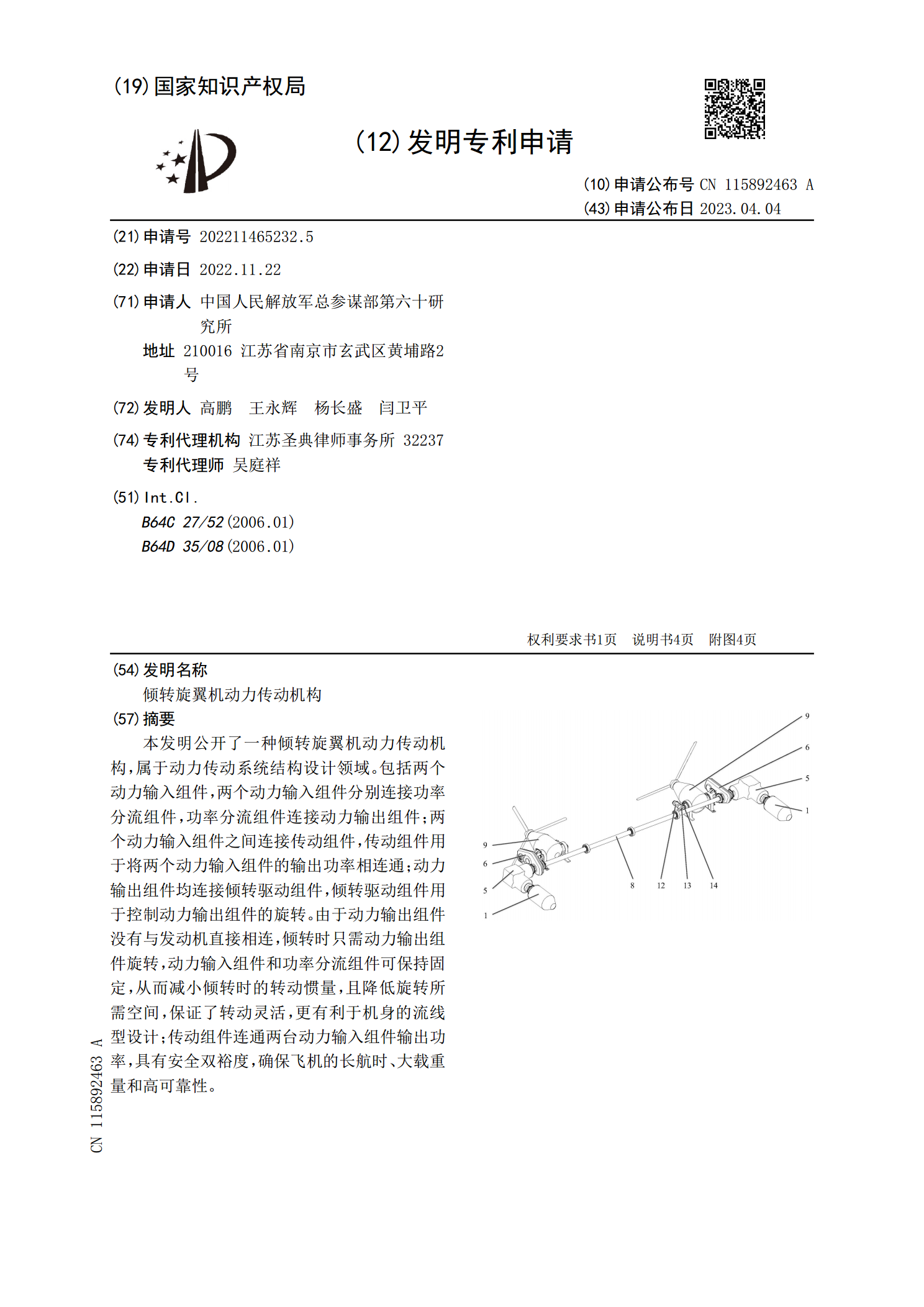
本发明公开了一种倾转旋翼机动力传动机构,属于动力传动系统结构设计领域。包括两个动力输入组件,两个动力输入组件分别连接功率分流组件,功率分流组件连接动力输出组件;两个动力输入组件之间连接传动组件,传动组件用于将两个动力输入组件的输出功率相连通;动力输出组件均连接倾转驱动组件,倾转驱动组件用于控制动力输出组件的旋转。由于动力输出组件没有与发动机直接相连,倾转时只需动力输出组件旋转,动力输入组件和功率分流组件可保持固定,从而减小倾转时的转动惯量,且降低旋转所需空间,保证了转动灵活,更有利于机身的流线型设计;传动

一种用于倾转旋翼机的倾转机构.pdf
本发明是一种用于倾转旋翼机的倾转机构,整体包括步进电机,联轴器,丝杠,丝杠螺母,导轨,直线轴承,固定块,滑块,支撑连杆等部件。当步进电机顺时针转动时,机翼迎角变小,飞机向固定翼模式过渡;当步进电机逆时针旋转时,机翼迎角变大,飞机向多旋翼模式过渡。本发明实质为曲柄滑块机构,巧妙简单,质量小,但在任何飞行状态时,该结构承力较大,并且具有自锁功能。此外,本发明使用步进电机驱动,便于机械设计和控制实现。综上所述,该倾转机构相对于现有的舵机驱动,齿轮传动,液压传动等倾转方式,具有巨大的优势,拥有广阔的应用前景。
一种仿生倾转四旋翼机构.pdf
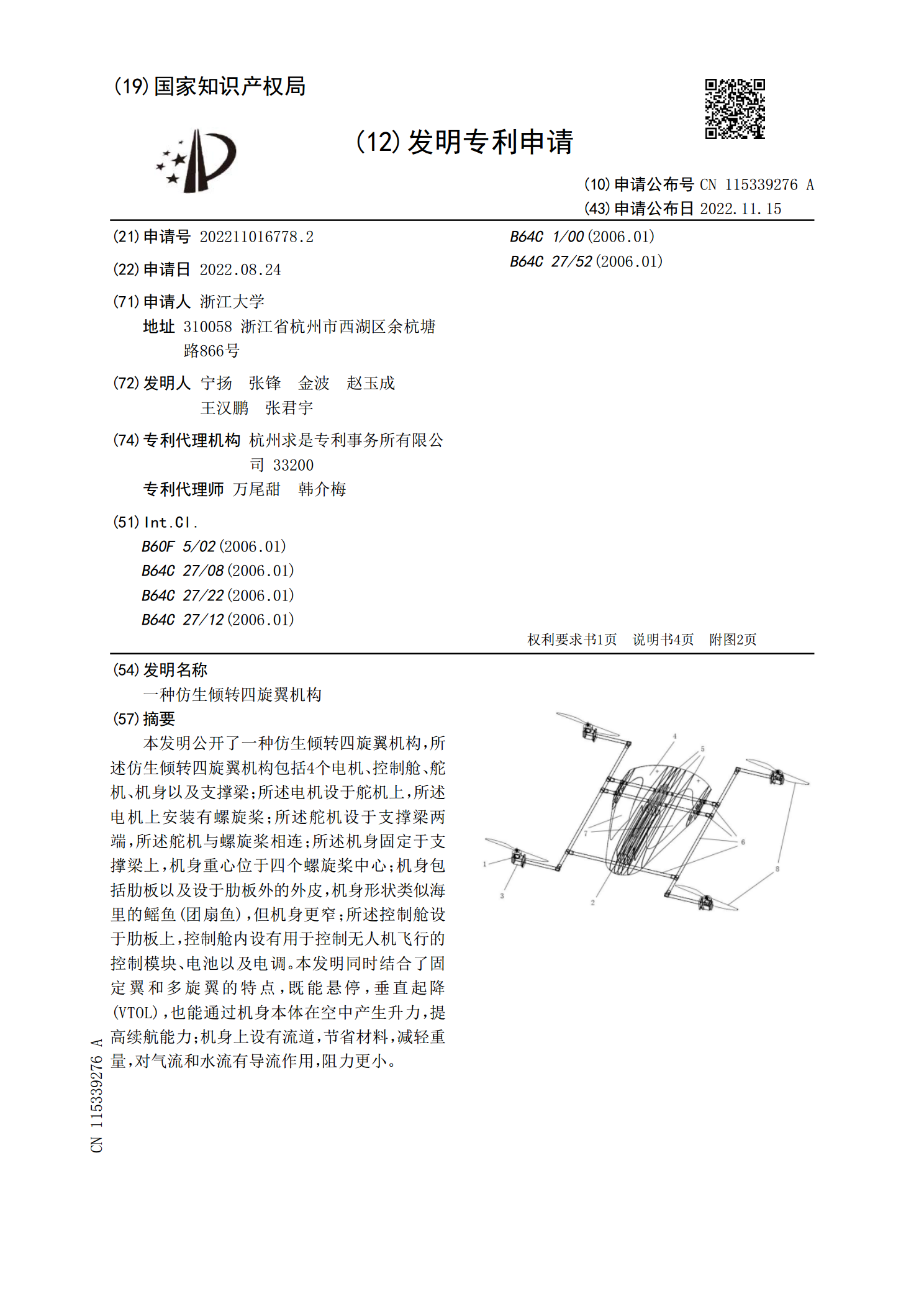
本发明公开了一种仿生倾转四旋翼机构,所述仿生倾转四旋翼机构包括4个电机、控制舱、舵机、机身以及支撑梁;所述电机设于舵机上,所述电机上安装有螺旋桨;所述舵机设于支撑梁两端,所述舵机与螺旋桨相连;所述机身固定于支撑梁上,机身重心位于四个螺旋桨中心;机身包括肋板以及设于肋板外的外皮,机身形状类似海里的鳐鱼(团扇鱼),但机身更窄;所述控制舱设于肋板上,控制舱内设有用于控制无人机飞行的控制模块、电池以及电调。本发明同时结合了固定翼和多旋翼的特点,既能悬停,垂直起降(VTOL),也能通过机身本体在空中产生升力,提高续

倾转机构及其工作方式和在倾转旋翼机上的应用.pdf
本发明涉及一种倾转机构及其工作方式和在倾转旋翼飞行器上的应用,属于倾转机构技术领域。该机构利用舵机通过蜗轮蜗杆装置带动倾转轴倾转,利用蜗轮蜗杆传动的自锁特性保证倾转轴倾转后稳定在预定位置。设置一个反馈回路,倾转轴上安装一个转环,转环和拉杆连接,拉杆另一端连接角度传感器,角度传感器转轴和倾转轴同步转动,并将倾转角转化为电信号提供给控制系统,实现反馈控制。