
多制动系统冗余控制方法及冗余控制系统.pdf

猫巷****松臣


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多制动系统冗余控制方法及冗余控制系统.pdf
本公开涉及车辆制动领域,涉及一种多制动系统冗余控制方法及冗余控制系统。其中,多制动系统冗余控制方法,包括:通过电子稳定控制系统、电子驻车辅助系统以及电子助力刹车系统中至少一个系统,确定电子稳定控制系统失效或电子稳定控制系统部分功能失效。快速检测到电子稳定控制系统功能失效或部分功能失效后,通过电子助力刹车系统功能和电子驻车辅助系统可以为电子稳定控制系统提供冗余,合理利用现有的制动系统。通过相应的制动补偿控制,对前轮和后轮施加所需的制动力,模拟电子稳定控制系统的功能,使车辆在恶劣行驶条件下稳定车身,保持车辆自

多制动系统冗余控制方法及冗余控制系统.pdf
本公开涉及一种多制动系统冗余控制方法及冗余控制系统,其中,多制动系统冗余控制方法应用于冗余控制系统,冗余控制系统包括:电子稳定控制系统、电子驻车辅助系统以及电子助力刹车系统;多制动系统冗余控制方法包括:通过电子稳定控制系统、电子驻车辅助系统以及电子助力刹车系统中至少一个系统,确定电子助力刹车系统以及电子驻车辅助系统失效;确定制动需求;响应于制动需求,得到制动需求值,根据制动需求值,通过电子稳定控制系统对前轮和后轮分别施加制动力。通过上述方法,可以通过电子稳定控制系统代替电子助力刹车系统和电子驻车辅助系统的

冗余制动系统.pdf
本发明公开了一种冗余制动系统,包括油壶、踏板解耦阀、电缸解耦阀、轮缸、减压阀、增压阀和建压单元。所述建压单元包括活塞缸、泵单元和第一单向阀,所述油壶、踏板解耦阀、电缸解耦阀、所述轮缸、所述减压阀、所述增压阀、所述第一单向阀、所述活塞缸按照原有制动系统的连接方式进行连接,所述泵单元串联在所述电缸解耦阀和所述活塞缸之间;所述冗余制动系统的工作模式包括第一建压模式、第二建压模式和第一减压模式,所述第一建压模式为活塞缸建压,用于对车轮产生制动压力;所述第二建压模式为泵单元建压,用于对车轮产生制动压力;所述第一减压
基于PLC的多冗余分布式存储控制系统及方法.pdf
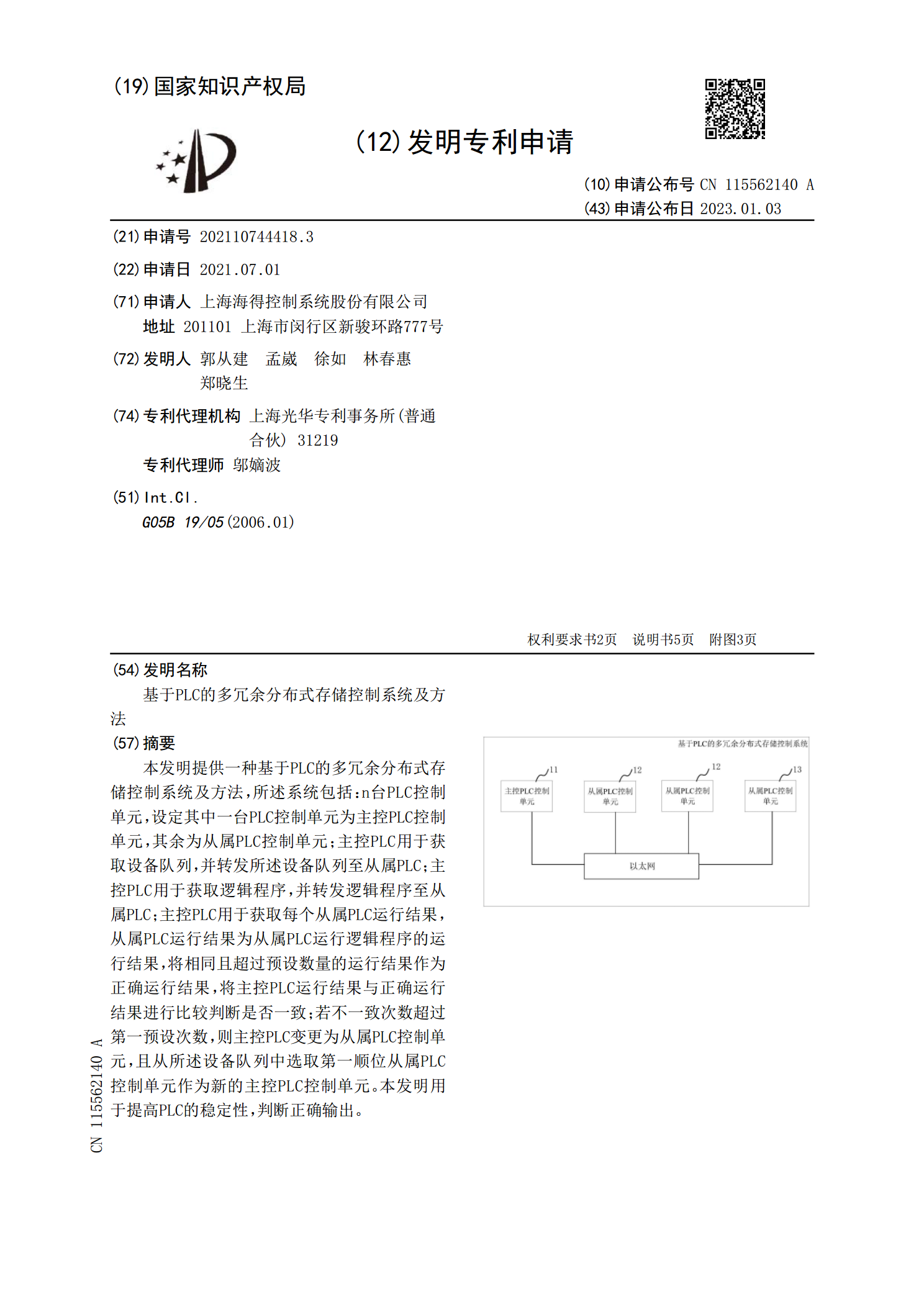
本发明提供一种基于PLC的多冗余分布式存储控制系统及方法,所述系统包括:n台PLC控制单元,设定其中一台PLC控制单元为主控PLC控制单元,其余为从属PLC控制单元;主控PLC用于获取设备队列,并转发所述设备队列至从属PLC;主控PLC用于获取逻辑程序,并转发逻辑程序至从属PLC;主控PLC用于获取每个从属PLC运行结果,从属PLC运行结果为从属PLC运行逻辑程序的运行结果,将相同且超过预设数量的运行结果作为正确运行结果,将主控PLC运行结果与正确运行结果进行比较判断是否一致;若不一致次数超过第一预设次数

舰艇控制系统中多机冗余的实现方法技术分析.docx
舰艇控制系统中多机冗余的实现方法技术分析舰艇控制系统是非常关键的系统之一,它的可靠性和安全性直接关系到整个舰艇任务的完成和生命安全。为了保障系统的可靠性和安全性,舰艇控制系统一般会采用多机冗余的设计方案。本文将对舰艇控制系统的多机冗余实现方法进行技术分析。一、多机冗余概述多机冗余是指在控制系统中采用多台相同的计算机执行同一份程序,互相之间可以进行数据交互,做到了多个机器在同一任务在同一时间进行计算,一旦发生某个机器出现故障,可以实现其他计算机接替服务,从而保证飞控系统始终能够运行。多机冗余可以提高系统的可