
一种变截面仿象鼻机械臂.pdf

森林****io

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种变截面仿象鼻机械臂.pdf
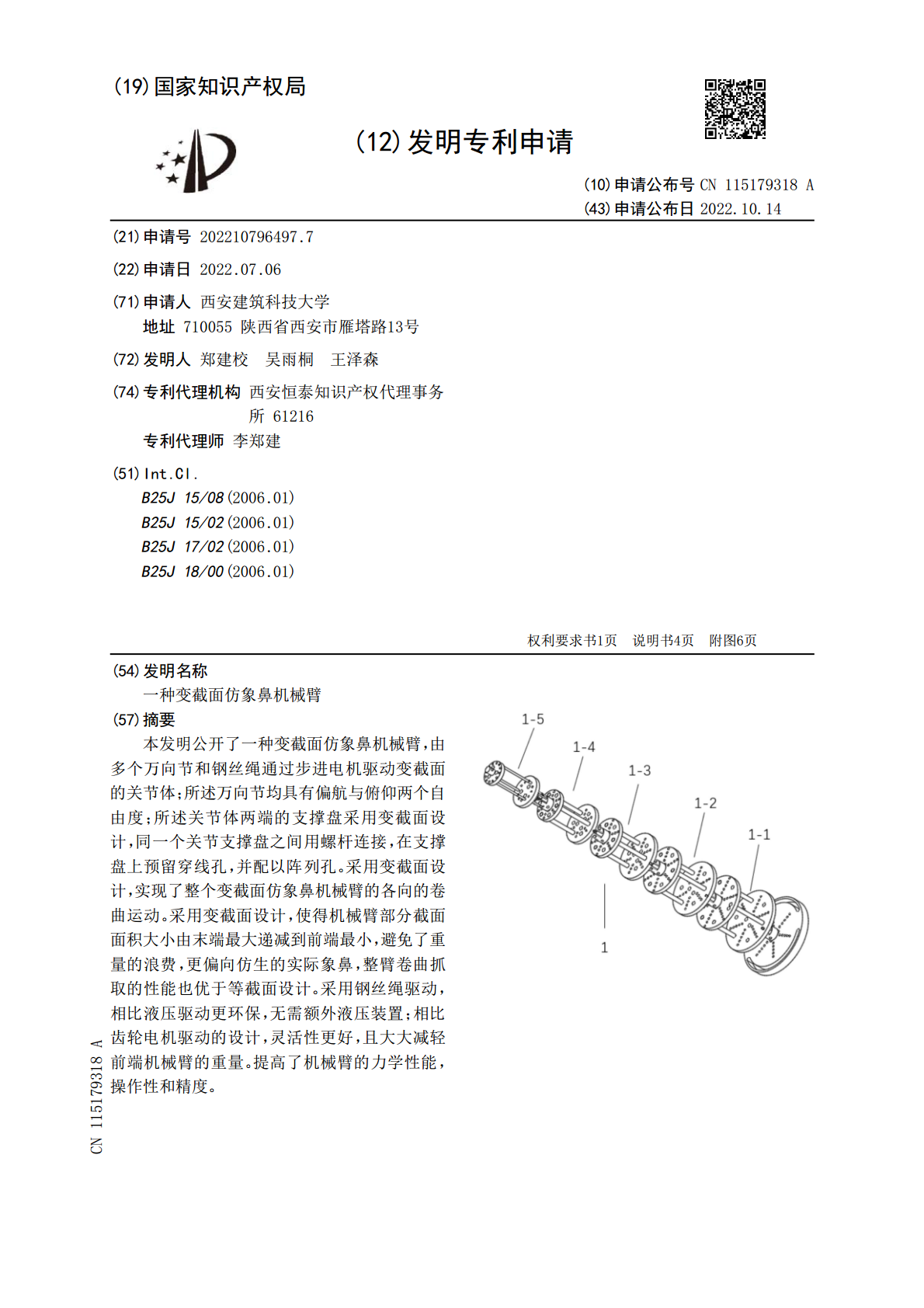
本发明公开了一种变截面仿象鼻机械臂,由多个万向节和钢丝绳通过步进电机驱动变截面的关节体;所述万向节均具有偏航与俯仰两个自由度;所述关节体两端的支撑盘采用变截面设计,同一个关节支撑盘之间用螺杆连接,在支撑盘上预留穿线孔,并配以阵列孔。采用变截面设计,实现了整个变截面仿象鼻机械臂的各向的卷曲运动。采用变截面设计,使得机械臂部分截面面积大小由末端最大递减到前端最小,避免了重量的浪费,更偏向仿生的实际象鼻,整臂卷曲抓取的性能也优于等截面设计。采用钢丝绳驱动,相比液压驱动更环保,无需额外液压装置;相比齿轮电机驱动的
一种仿象鼻的柔性机械臂及其应用.pdf
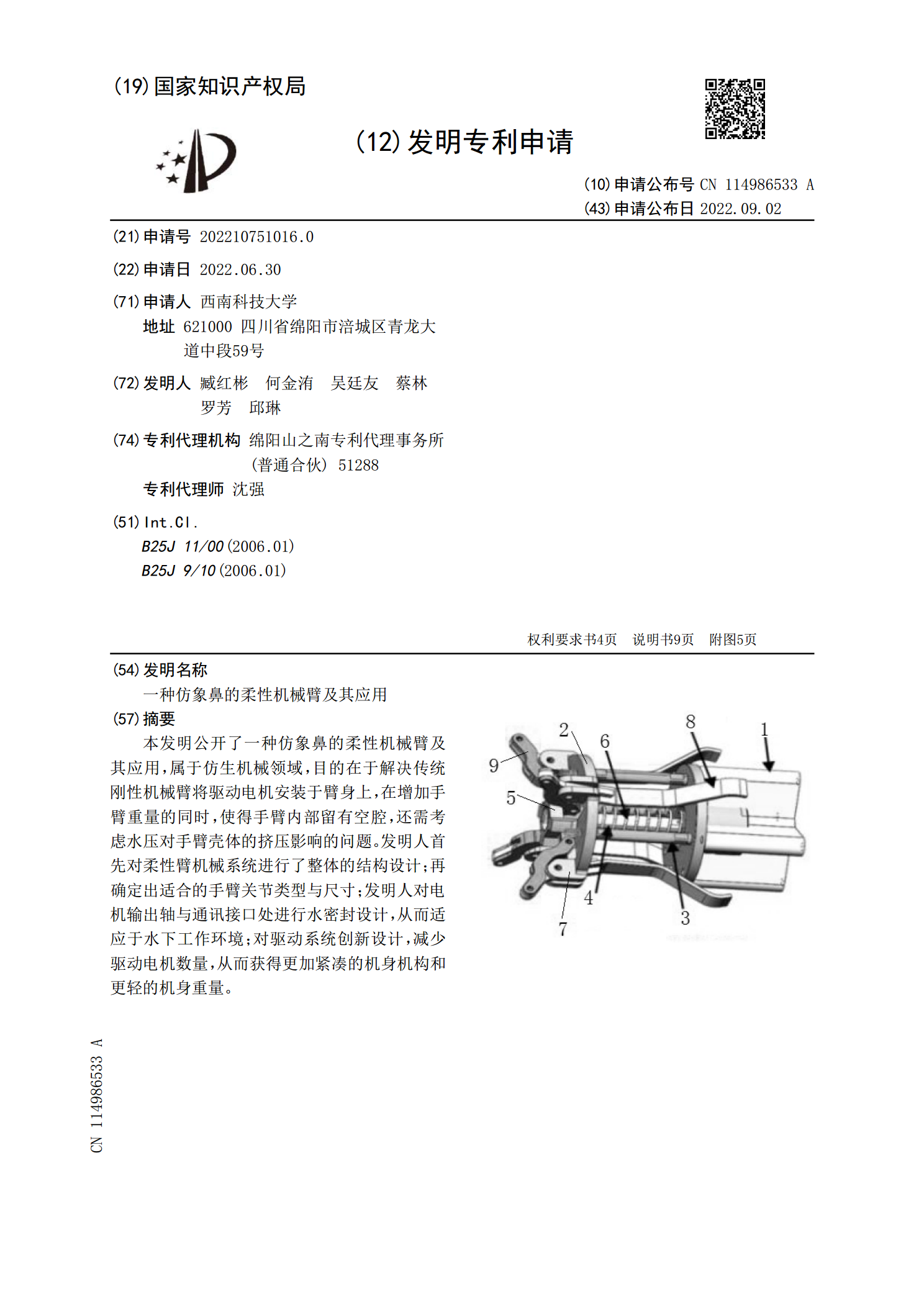
本发明公开了一种仿象鼻的柔性机械臂及其应用,属于仿生机械领域,目的在于解决传统刚性机械臂将驱动电机安装于臂身上,在增加手臂重量的同时,使得手臂内部留有空腔,还需考虑水压对手臂壳体的挤压影响的问题。发明人首先对柔性臂机械系统进行了整体的结构设计;再确定出适合的手臂关节类型与尺寸;发明人对电机输出轴与通讯接口处进行水密封设计,从而适应于水下工作环境;对驱动系统创新设计,减少驱动电机数量,从而获得更加紧凑的机身机构和更轻的机身重量。

变截面柔性机械臂固有频率测定方法研究.docx
变截面柔性机械臂固有频率测定方法研究摘要:本文研究了变截面柔性机械臂固有频率的测定方法。首先,介绍了柔性机械臂的基本组成和工作原理。接着,分析了柔性机械臂的固有频率对其工作性能的重要影响。然后,详细阐述了变截面柔性机械臂固有频率测定的几种方法,包括有限元分析方法、频谱分析方法和直接测量方法。最后,结合实验结果,评估了这些方法的优缺点,为进一步的研究提供了参考。关键词:柔性机械臂,固有频率,变截面,测定方法正文:一、引言随着自动化技术的不断发展,机械臂在工业自动化领域得到了广泛应用。而传统的机械臂由于刚性较

一种等截面空间机械臂臂杆伸缩机构.pdf
本发明公开了一种等截面空间机械臂臂杆伸缩机构,通过水平板带和竖直板带相互锁紧、啮合形成螺旋管柱的形式实现机械臂臂杆的伸缩,使得该臂杆具有收纳率低的特点,同时可使空间机械臂具有变构型的能力;当机械臂处于收缩状态时,具有发射包络小,操作精度高的特点;当机械臂处于伸长状态时,具有可达范围大的特点。臂杆伸缩的功能可提高机械臂在轨服务的适应能力;竖直板带沿高度方向的横截面上设置折弯,可保证同侧的两面间的距离与竖直板带厚度一致,下一层的竖直板带不会因重叠后凸起,而下层与上一层的竖直板带的外表面处在同一竖直面内,因此可

一种变截面车辆纵臂构件的后加工方法.pdf
一种变截面车辆纵臂构件的后加工方法,所述后加工方法包括以下步骤:1)将变截面车辆纵臂构件装夹定位;2)采用激光切割加工所述变截面车辆纵臂构件的轮毂端和轴套端的通孔。本发明提供一种简化加工过程、降低消耗和制作成本、提高构件的一致性、提升制作精度的变截面车辆纵臂构件的后加工方法。?