
一种基于并联驱动机构的六自由度航天器对接用调姿平台.pdf

骊英****bb

1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于并联驱动机构的六自由度航天器对接用调姿平台.pdf
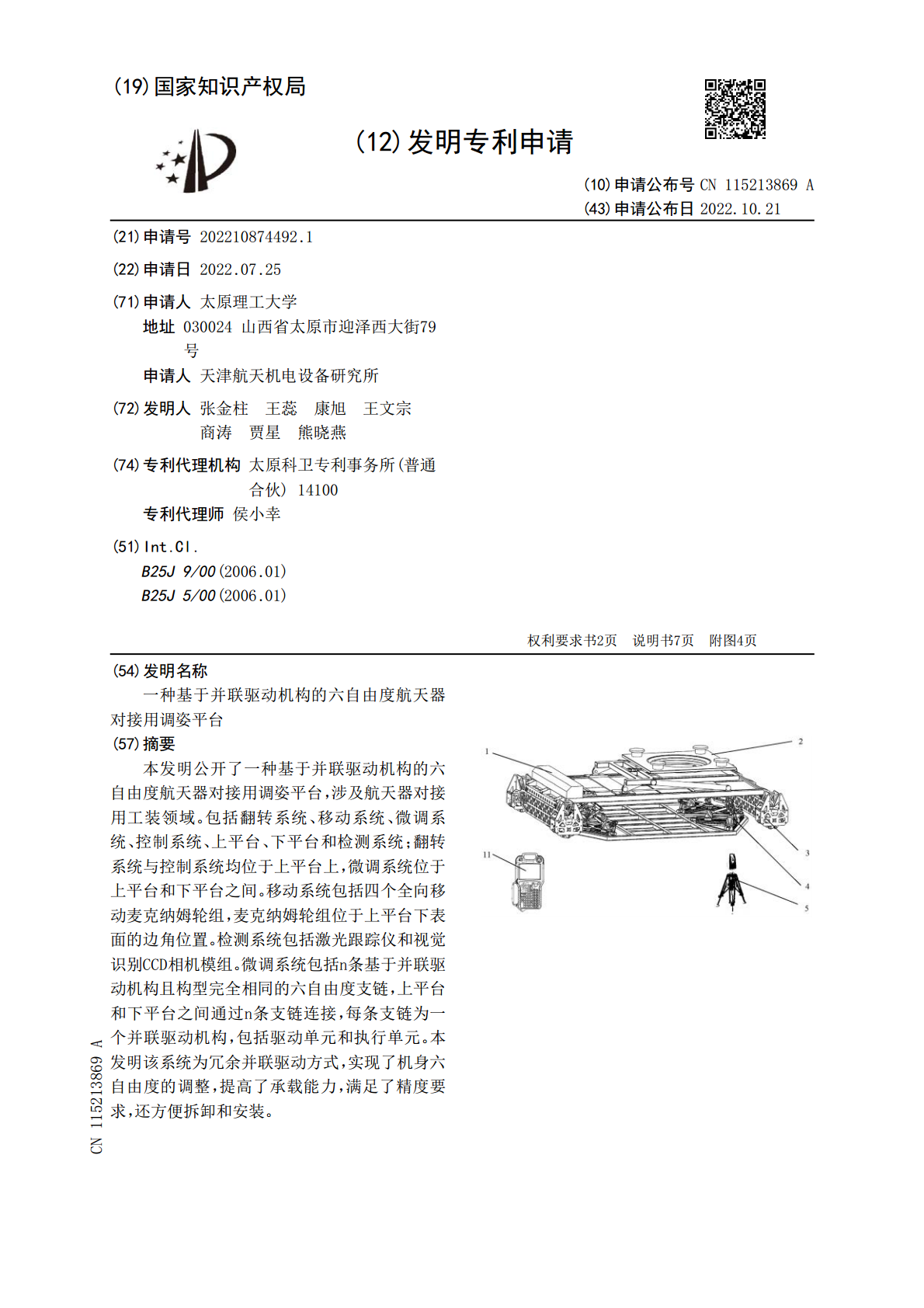
本发明公开了一种基于并联驱动机构的六自由度航天器对接用调姿平台,涉及航天器对接用工装领域。包括翻转系统、移动系统、微调系统、控制系统、上平台、下平台和检测系统;翻转系统与控制系统均位于上平台上,微调系统位于上平台和下平台之间。移动系统包括四个全向移动麦克纳姆轮组,麦克纳姆轮组位于上平台下表面的边角位置。检测系统包括激光跟踪仪和视觉识别CCD相机模组。微调系统包括n条基于并联驱动机构且构型完全相同的六自由度支链,上平台和下平台之间通过n条支链连接,每条支链为一个并联驱动机构,包括驱动单元和执行单元。本发明该

六自由度调姿对接平台.pdf
六自由度调姿对接平台,主要包括移动底座、底层三自由度运动平台和顶层三自由度运动平台三大部分组成。本发明底层运动平台的个驱动电机采用对称布置,这样驱动马达均布在平台平面内,使平台整体质量均布,具有较好的平衡性,从而使动态性能提升;平台采用十字交错直线滑道与支撑架A同层,采用圆形滑道与支撑架B同层,该同层分布利于高度尺寸压缩,较少了结构串联引起的高度增加;利用四个驱动电缸差动原理实现底层运动平台位姿调节,避免了传统方式中驱动器与驱动对象一一对应分布造成的空间层数叠加,优化了传统驱动布置空间,从而使平台在高度方
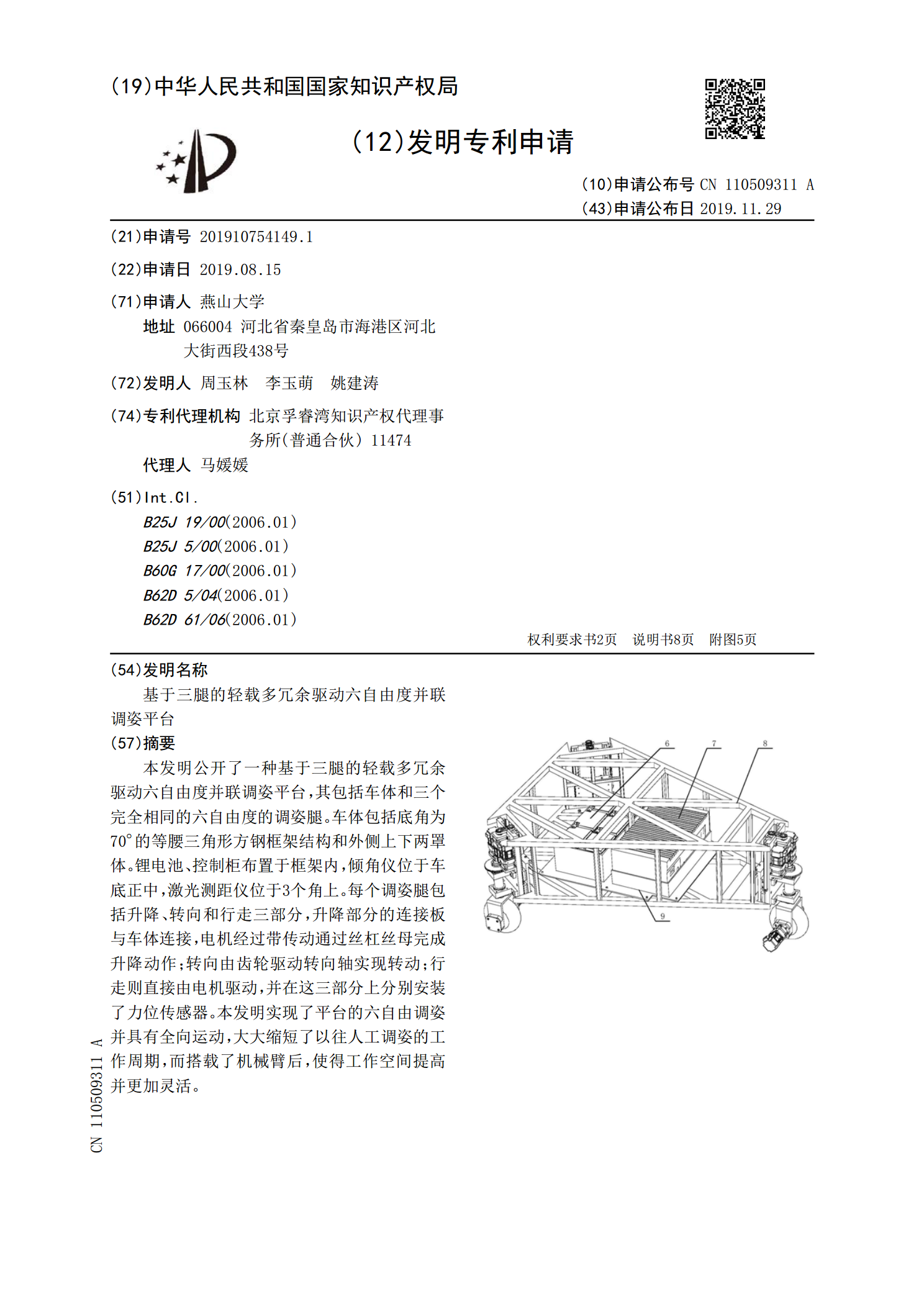
基于三腿的轻载多冗余驱动六自由度并联调姿平台.pdf
本发明公开了一种基于三腿的轻载多冗余驱动六自由度并联调姿平台,其包括车体和三个完全相同的六自由度的调姿腿。车体包括底角为70°的等腰三角形方钢框架结构和外侧上下两罩体。锂电池、控制柜布置于框架内,倾角仪位于车底正中,激光测距仪位于3个角上。每个调姿腿包括升降、转向和行走三部分,升降部分的连接板与车体连接,电机经过带传动通过丝杠丝母完成升降动作;转向由齿轮驱动转向轴实现转动;行走则直接由电机驱动,并在这三部分上分别安装了力位传感器。本发明实现了平台的六自由调姿并具有全向运动,大大缩短了以往人工调姿的工作周期

一种含有塔形伸缩分支的环形驱动六自由度并联调姿隔振平台.pdf
一种含有塔形伸缩分支的环形驱动六自由度并联调姿隔振平台,主要包括基座、六滑块环形驱动单元、三条塔形伸缩分支、助力弹簧和动平台;所述六滑块环形驱动单元由带有环形导轨的中心齿轮和六个带有小齿轮驱动的滑块组成,中心齿轮固连在基座上,中心齿轮的环形导轨上设有六个滑块,小齿轮与中心齿轮啮合;所述塔形伸缩分支由两个闭环连杆和平面剪叉机构组成,该塔形伸缩分支平面剪叉机构下端的两个塔脚分别通过球铰与两相邻滑块连接,该塔形伸缩分支的上端为连接两闭环连杆的转动副,该转动副的转轴通过万向铰与隔振器的一端连接,隔振器的另一端与动

适合低矮空间的六自由度并联调姿平台.pdf
本发明涉及一种适合低矮空间的六自由度并联调姿平台,其包括车体和三个相同的六自由度的调姿支链腿;车体包括六边形的框架结构和外侧上下两罩体。锂电池、控制柜布置于框架内,倾角仪位于车底正中,激光测距仪其中四个面上。每个调姿支链腿包括转向、升降以及行走部分,转向双由电机驱动齿轮、带动转盘轴承转动;升降电机经过同步带传动通过丝杠丝母完成升降动作;行走则经同步带传动由电机驱动,并在这三部分上分别安装了力位传感器。通过地面封闭、形成3‑R