
轮轨滚动接触疲劳快速预测方法.pdf

安双****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
轮轨滚动接触疲劳快速预测方法.pdf
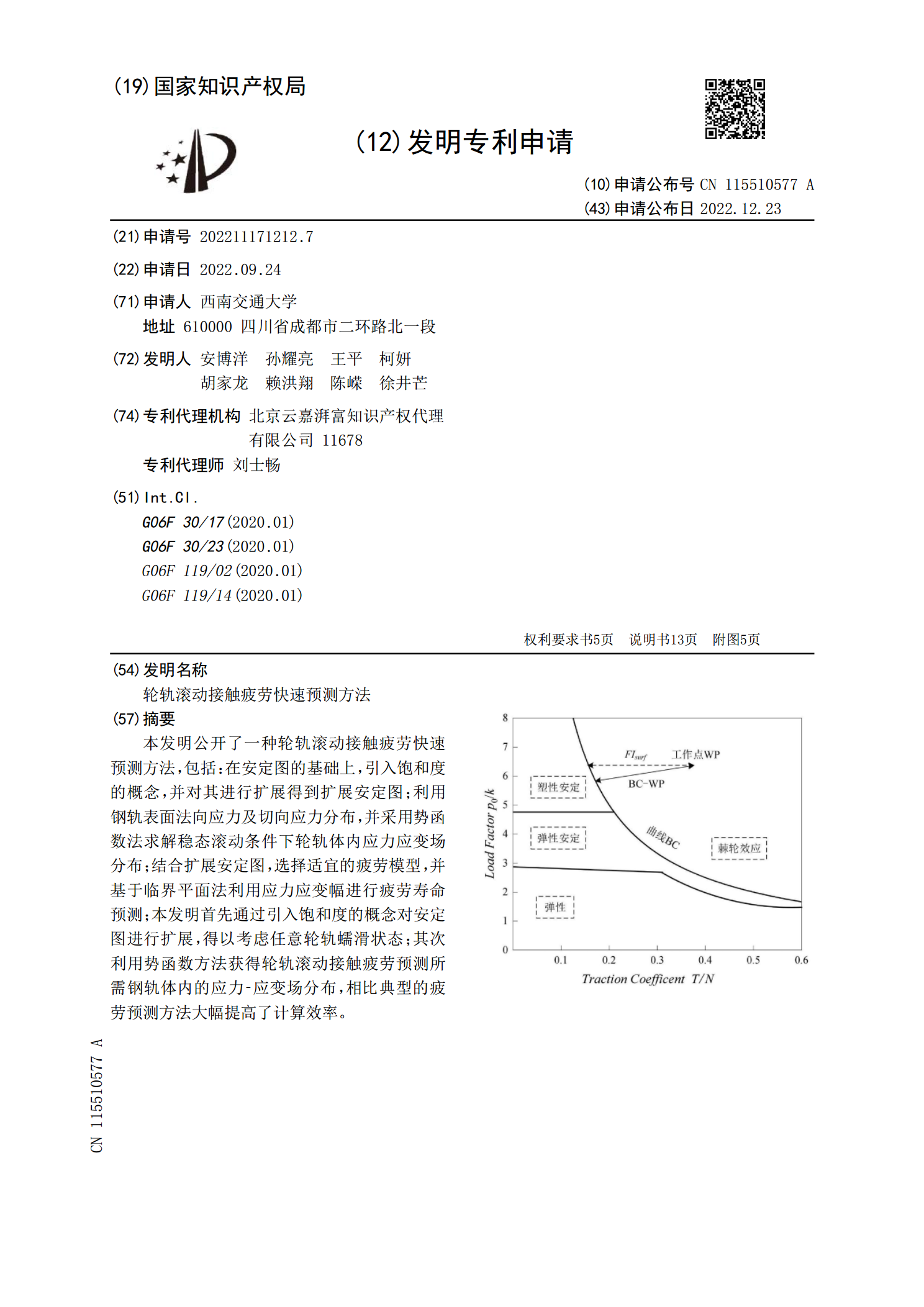
本发明公开了一种轮轨滚动接触疲劳快速预测方法,包括:在安定图的基础上,引入饱和度的概念,并对其进行扩展得到扩展安定图;利用钢轨表面法向应力及切向应力分布,并采用势函数法求解稳态滚动条件下轮轨体内应力应变场分布;结合扩展安定图,选择适宜的疲劳模型,并基于临界平面法利用应力应变幅进行疲劳寿命预测;本发明首先通过引入饱和度的概念对安定图进行扩展,得以考虑任意轮轨蠕滑状态;其次利用势函数方法获得轮轨滚动接触疲劳预测所需钢轨体内的应力‑应变场分布,相比典型的疲劳预测方法大幅提高了计算效率。

基于ANSYS的轮轨滚动接触疲劳裂纹萌生研究.docx
基于ANSYS的轮轨滚动接触疲劳裂纹萌生研究摘要本文以ANSYS为工具,研究了轮轨滚动接触下的疲劳裂纹萌生特性。通过构建轮轨滚动接触模型,利用有限元分析方法,考虑了材料的非线性本质以及疲劳载荷的作用,探究了轮轨接触表面上的疲劳裂纹萌生规律。研究结果表明,界面处应力集中导致了轮轨接触表面的疲劳裂纹萌生,而裂纹数量和深度与载荷及材料本身的性质密切相关。本研究可为轮轨接触表面结构设计及轨道维护提供参考依据。关键词:疲劳裂纹萌生;轮轨接触;ANSYS;有限元分析;应力集中引言轮轨接触是列车行驶中至关重要的环节,其

滚动接触疲劳寿命预测方法综述.docx
滚动接触疲劳寿命预测方法综述滚动接触疲劳寿命预测方法综述滚动接触疲劳是指在滚动件和滚道之间的微小接触点上,由于反复的应力载荷作用,导致材料的损伤和终极破坏。这种现象普遍存在于机械设备中,如轴承、齿轮、机械动臂等。为了确保设备的可靠性和使用寿命,需要对滚动接触疲劳寿命进行预测和评估。本文将对滚动接触疲劳寿命预测方法进行综述,主要包括有限元方法、应力波法和统计学方法。一、有限元方法有限元方法是一种基于数学和力学原理的计算机模拟技术,利用计算机将被分割成许多小块的工件进行数值计算,以预测其力学性能和行为。在滚动

轮轨高速滚动接触及钢轨疲劳裂纹扩展研究.docx
轮轨高速滚动接触及钢轨疲劳裂纹扩展研究轮轨高速滚动接触及钢轨疲劳裂纹扩展研究摘要轮轨高速滚动接触及钢轨疲劳裂纹扩展是铁路运输行业的一个重大问题。本文对轮轨高速滚动接触及钢轨疲劳裂纹扩展进行了深入研究。首先介绍了轮轨高速滚动接触及钢轨疲劳裂纹扩展的背景及意义。然后,分析了轮轨高速滚动接触的原因及其对铁路运输的影响。接着,对钢轨疲劳裂纹的形成及传播机制进行了探讨。最后,本文提出了预防和控制轮轨高速滚动接触及钢轨疲劳裂纹扩展的策略。关键词:轮轨高速滚动接触;钢轨疲劳裂纹;铁路运输;预防策略;控制策略Abstra

轮轨滚动接触疲劳裂纹的动态扩展研究的开题报告.docx
轮轨滚动接触疲劳裂纹的动态扩展研究的开题报告一、选题背景及研究意义轮轨作为铁路交通中最基本的组成部分,其运行状态的稳定性和安全性直接关系到铁路线路的运营效益以及广大人民群众的出行安全。在铁路交通中,轮轨接触是最基础也是最重要的一环。而轮轨接触的疲劳裂纹是造成铁路车辆运行安全事故的主要原因之一。因此,研究轮轨接触疲劳裂纹的动态扩展规律,对于铁路交通的安全稳定运行有着重要的意义。目前,国内外对于轮轨接触疲劳裂纹的研究主要集中在静态力学试验和数值模拟两个方面。然而,轮轨接触过程中裂纹的动态扩展规律研究却较为缺乏