
一种基于附加横摆力矩的人机共驾汽车紧急避撞控制方法及系统.pdf

慧颖****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于附加横摆力矩的人机共驾汽车紧急避撞控制方法及系统.pdf
本发明公开了一种基于附加横摆力矩的人机共驾汽车紧急避撞控制方法及系统,属于人机共驾行驶安全技术领域,本发明充分考虑了与障碍物距离、路面附着系数、自车速度、方向盘应激转角和驾驶员线性转向认知,采用圆弧换道路径并在曲率突变处进行平滑处理;根据车辆紧急工况应激转向过程中状态量的变化及约束设计模型预测控制算法,计算出保证车辆跟踪精度和安全性的附加横摆力矩并按各轮载荷比例合理分配;通过控制各轮制动力来对驾驶人强制接管时的不合理输入进行有效补偿,解决了现有避撞控制方法存在的加剧驾驶人紧张心理的问题,实现了辅助驾驶人在
一种考虑人机和谐的汽车紧急避撞分层式控制方法.pdf
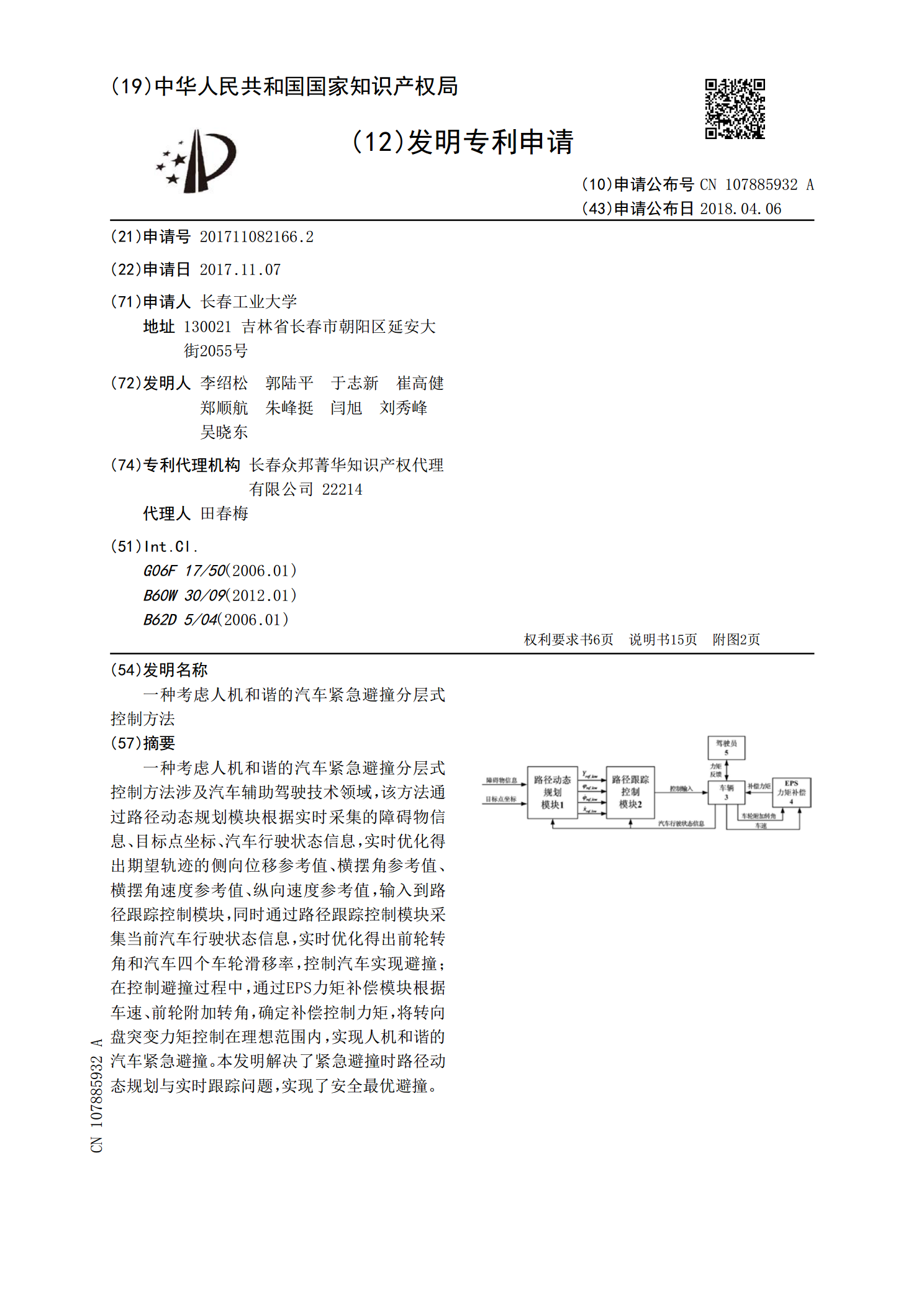
一种考虑人机和谐的汽车紧急避撞分层式控制方法涉及汽车辅助驾驶技术领域,该方法通过路径动态规划模块根据实时采集的障碍物信息、目标点坐标、汽车行驶状态信息,实时优化得出期望轨迹的侧向位移参考值、横摆角参考值、横摆角速度参考值、纵向速度参考值,输入到路径跟踪控制模块,同时通过路径跟踪控制模块采集当前汽车行驶状态信息,实时优化得出前轮转角和汽车四个车轮滑移率,控制汽车实现避撞;在控制避撞过程中,通过EPS力矩补偿模块根据车速、前轮附加转角,确定补偿控制力矩,将转向盘突变力矩控制在理想范围内,实现人机和谐的汽车紧急

一种转向盘突变力矩人性化调节的汽车紧急避撞控制方法.pdf
一种转向盘突变力矩人性化调节的汽车紧急避撞控制方法涉及汽车先进驾驶辅助技术领域,该方法利用植有汽车紧急避撞控制算法的路径动态规划与实时跟踪控制模块根据实时采集的障碍物位置信息、目标点坐标、汽车行驶状态信息,实时优化得出前轮转角,控制汽车实现避撞;在控制避撞过程中,通过植有转向盘突变力矩人性化调节算法的EPS力矩补偿模块根据车速、前轮附加转角,确定补偿控制力矩,将转向盘突变力矩控制在理想范围内,实现转向盘突变力矩人性化调节的汽车紧急避撞。本发明以避撞距离最短和平滑转向为优化目标,采用不碰撞约束代替了路径动态

基于模糊控制的汽车直接横摆力矩研究.docx
基于模糊控制的汽车直接横摆力矩研究标题:基于模糊控制的汽车直接横摆力矩研究摘要:随着汽车行业的高速发展,汽车安全性和稳定性的要求也越来越高。直接横摆力矩是一种用来提高汽车横向稳定性的控制手段。本文以模糊控制为基础,研究了汽车直接横摆力矩的应用。首先,介绍了直接横摆力矩的概念和影响因素。然后,详细阐述了模糊控制原理和流程,并提出了一套基于模糊控制的汽车直接横摆力矩控制方法。最后,通过仿真实验验证了该方法的有效性和稳定性。研究结果表明,基于模糊控制的汽车直接横摆力矩控制方法能够显著提高汽车的横向稳定性,为汽车

基于模型预测控制的汽车紧急转向避撞研究.pptx
汇报人:CONTENTS添加章节标题模型预测控制原理模型预测控制的定义和基本原理模型预测控制在汽车控制中的应用模型预测控制的优势和局限性汽车紧急转向避撞系统汽车紧急转向避撞系统的基本构成紧急转向避撞系统的关键技术紧急转向避撞系统的实现流程基于模型预测控制的汽车紧急转向避撞算法算法的基本思想算法的主要步骤和流程算法的关键技术问题及解决方案实验验证与结果分析实验环境和测试条件实验结果及分析结果与现有方法的比较结论与展望研究结论研究不足与展望汇报人: