
一种基于腱鞘驱动的医用上肢辅助外骨骼.pdf

努力****爱静

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于腱鞘驱动的医用上肢辅助外骨骼.pdf
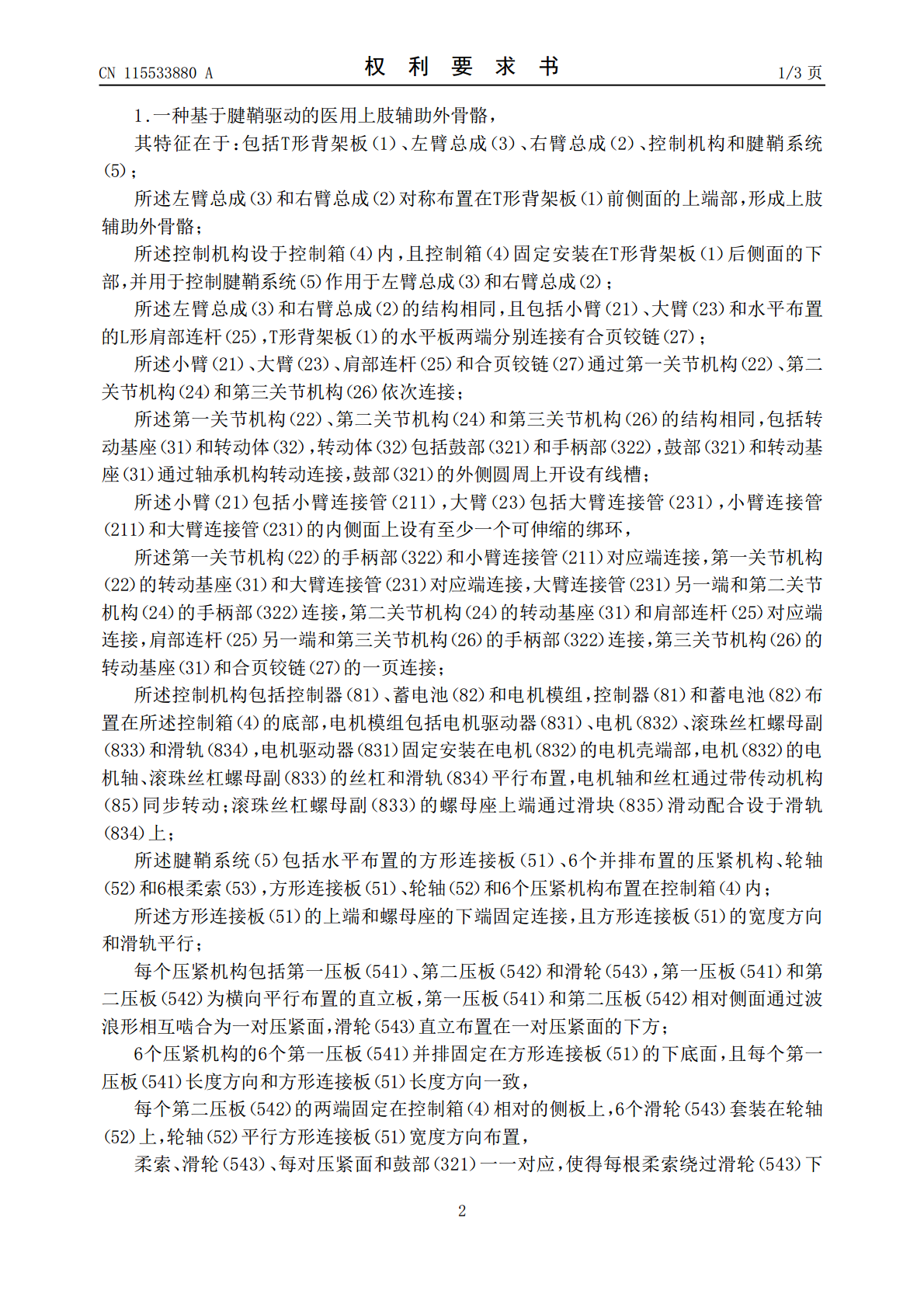
本发明属于机器人领域,具体涉及一种基于腱鞘驱动的医用上肢辅助外骨骼。包括T形背架板、左臂总成、右臂总成、控制机构和腱鞘系统;左臂总成和右臂总成均包括小臂、大臂和水平布置的L形肩部连杆;小臂、大臂、肩部连杆和合页铰链通过第一关节机构、第二关节机构和第三关节机构依次连接;控制机构包括控制器、蓄电池和电机模组,腱鞘系统包括方形连接板、6个并排布置的压紧机构、轮轴和6根柔索,上肢辅助外骨骼穿戴在人体左臂和人体右臂上,脚踏板开关通过控制控制器实现对电机的控制,使得每对压紧面压紧或松开对应的柔索,实现约束第一关节机构
一种辅助动力上肢外骨骼.pdf
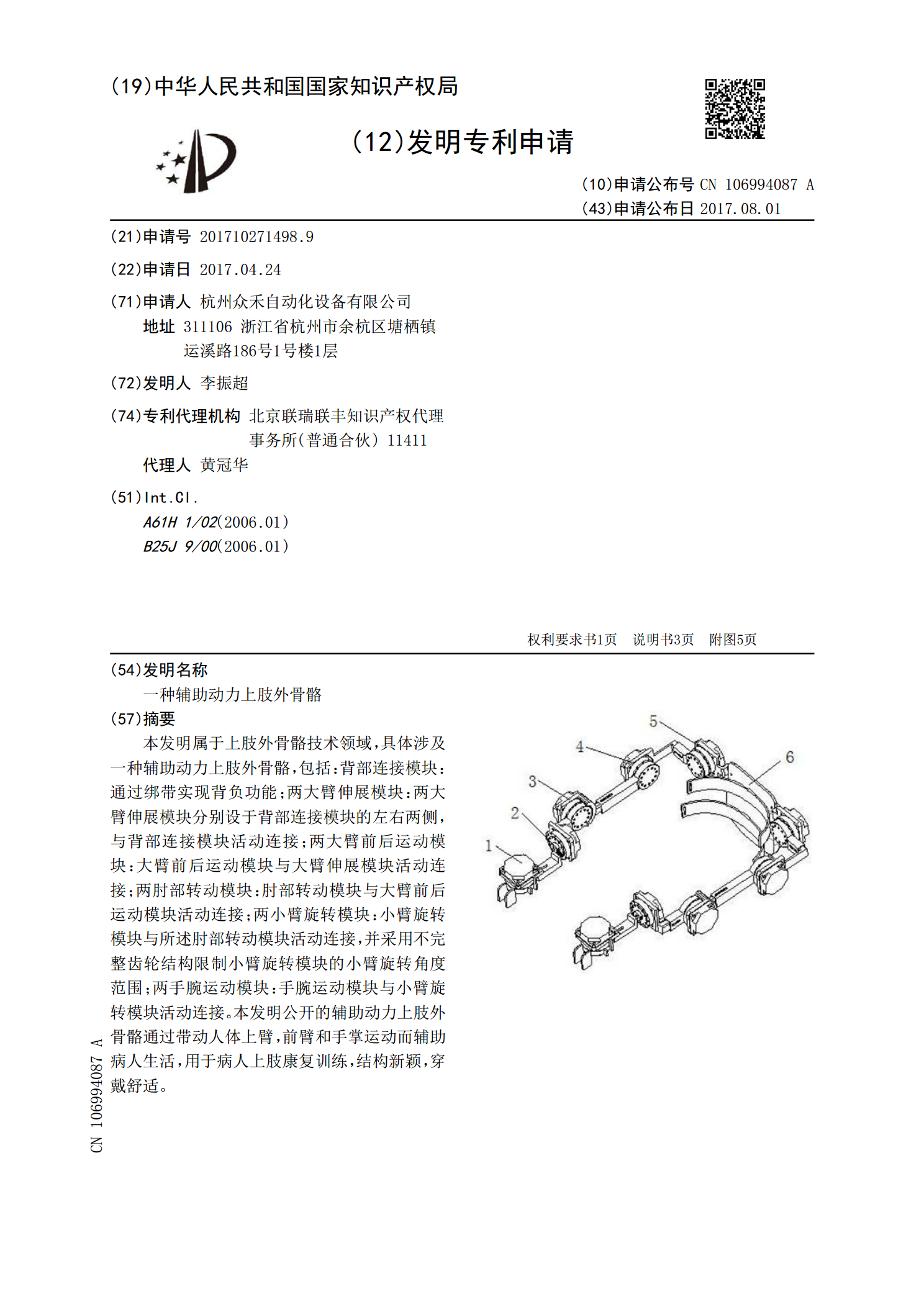
本发明属于上肢外骨骼技术领域,具体涉及一种辅助动力上肢外骨骼,包括:背部连接模块:通过绑带实现背负功能;两大臂伸展模块:两大臂伸展模块分别设于背部连接模块的左右两侧,与背部连接模块活动连接;两大臂前后运动模块:大臂前后运动模块与大臂伸展模块活动连接;两肘部转动模块:肘部转动模块与大臂前后运动模块活动连接;两小臂旋转模块:小臂旋转模块与所述肘部转动模块活动连接,并采用不完整齿轮结构限制小臂旋转模块的小臂旋转角度范围;两手腕运动模块:手腕运动模块与小臂旋转模块活动连接。本发明公开的辅助动力上肢外骨骼通过带动人

一种上肢采摘辅助外骨骼.pdf
本发明涉及辅助外骨骼技术领域,尤其涉及一种上肢采摘辅助外骨骼。该上肢采摘辅助外骨骼包括背部支撑机构、两个肩部支撑机构、两个上臂支撑机构以及两个上臂调节机构,所述肩部支撑机构包括肩部支撑板,所述上臂支撑机构包括上臂支撑板,所述上臂调节机构包括齿条和连杆,所述齿条包括下部锯齿部和上部平滑部,所述齿条上设有滑块,所述滑块与连接块相连,所述连接块上设有齿形端,所述连接块与所述连杆活动连接。该上肢采摘辅助外骨骼,结构简单,体积小,操作方便,可以帮助果农方便易行地采摘高处果实,提升采摘负载能力和采摘效率,使人们能更加
一种柔性上肢外骨骼机器人驱动系统.pdf
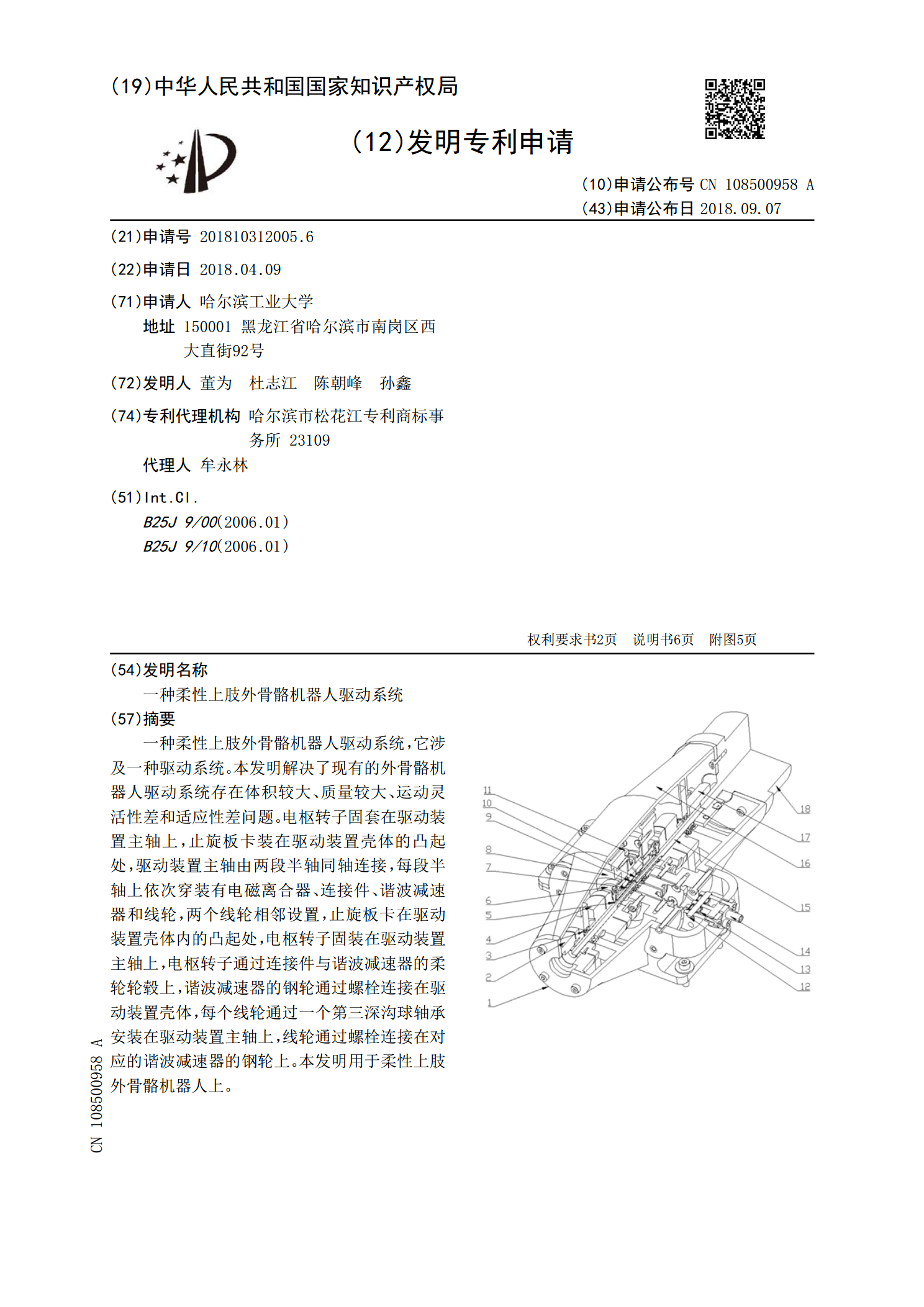
一种柔性上肢外骨骼机器人驱动系统,它涉及一种驱动系统。本发明解决了现有的外骨骼机器人驱动系统存在体积较大、质量较大、运动灵活性差和适应性差问题。电枢转子固套在驱动装置主轴上,止旋板卡装在驱动装置壳体的凸起处,驱动装置主轴由两段半轴同轴连接,每段半轴上依次穿装有电磁离合器、连接件、谐波减速器和线轮,两个线轮相邻设置,止旋板卡在驱动装置壳体内的凸起处,电枢转子固装在驱动装置主轴上,电枢转子通过连接件与谐波减速器的柔轮轮毂上,谐波减速器的钢轮通过螺栓连接在驱动装置壳体,每个线轮通过一个第三深沟球轴承安装在驱动装
一种气动肌肉驱动的上肢外骨骼机器人.pdf
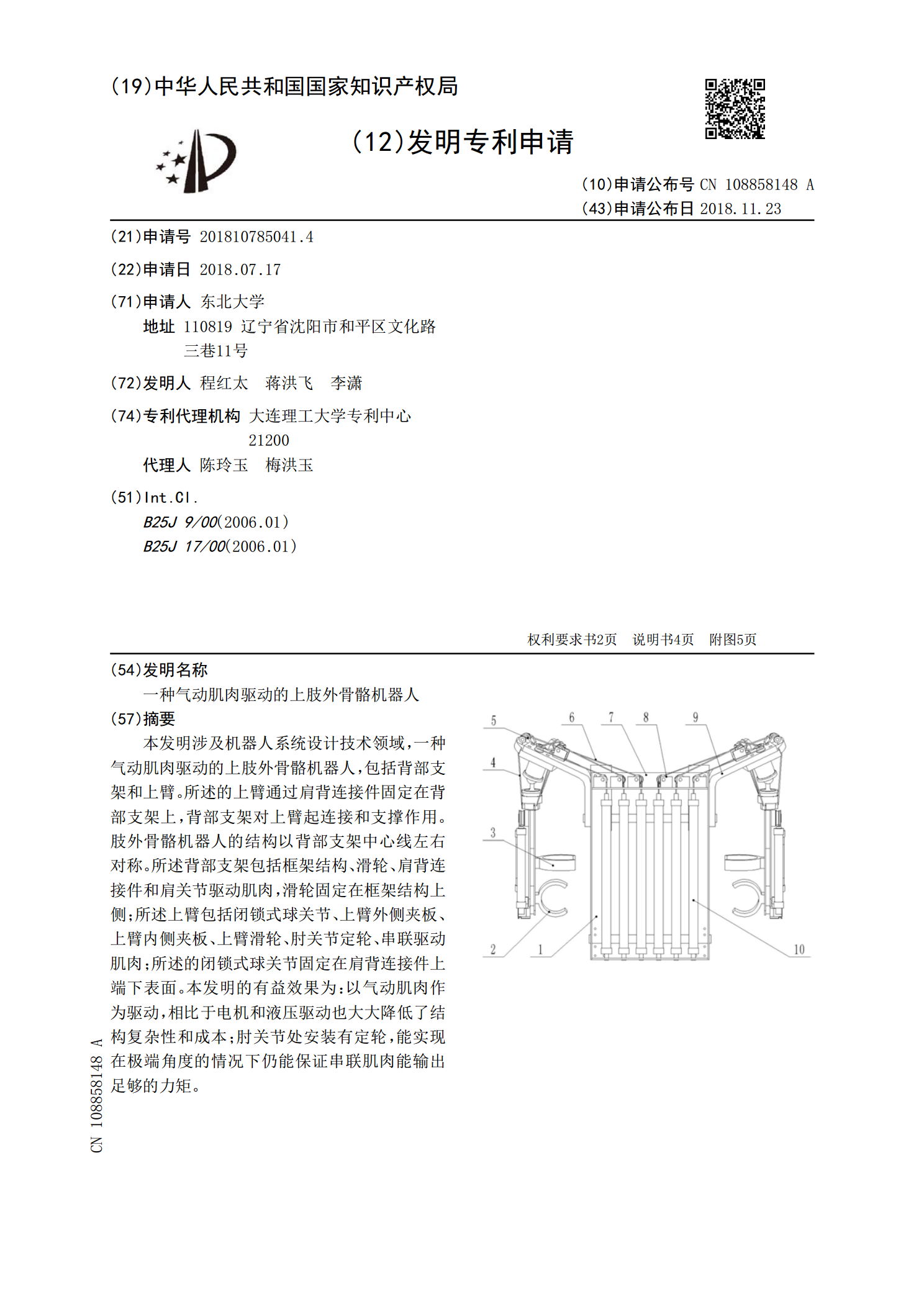
本发明涉及机器人系统设计技术领域,一种气动肌肉驱动的上肢外骨骼机器人,包括背部支架和上臂。所述的上臂通过肩背连接件固定在背部支架上,背部支架对上臂起连接和支撑作用。肢外骨骼机器人的结构以背部支架中心线左右对称。所述背部支架包括框架结构、滑轮、肩背连接件和肩关节驱动肌肉,滑轮固定在框架结构上侧;所述上臂包括闭锁式球关节、上臂外侧夹板、上臂内侧夹板、上臂滑轮、肘关节定轮、串联驱动肌肉;所述的闭锁式球关节固定在肩背连接件上端下表面。本发明的有益效果为:以气动肌肉作为驱动,相比于电机和液压驱动也大大降低了结构复杂