
机器人的路径规划方法及装置、机器人、存储介质.pdf

一吃****成益

1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人的路径规划方法及装置、机器人、存储介质.pdf
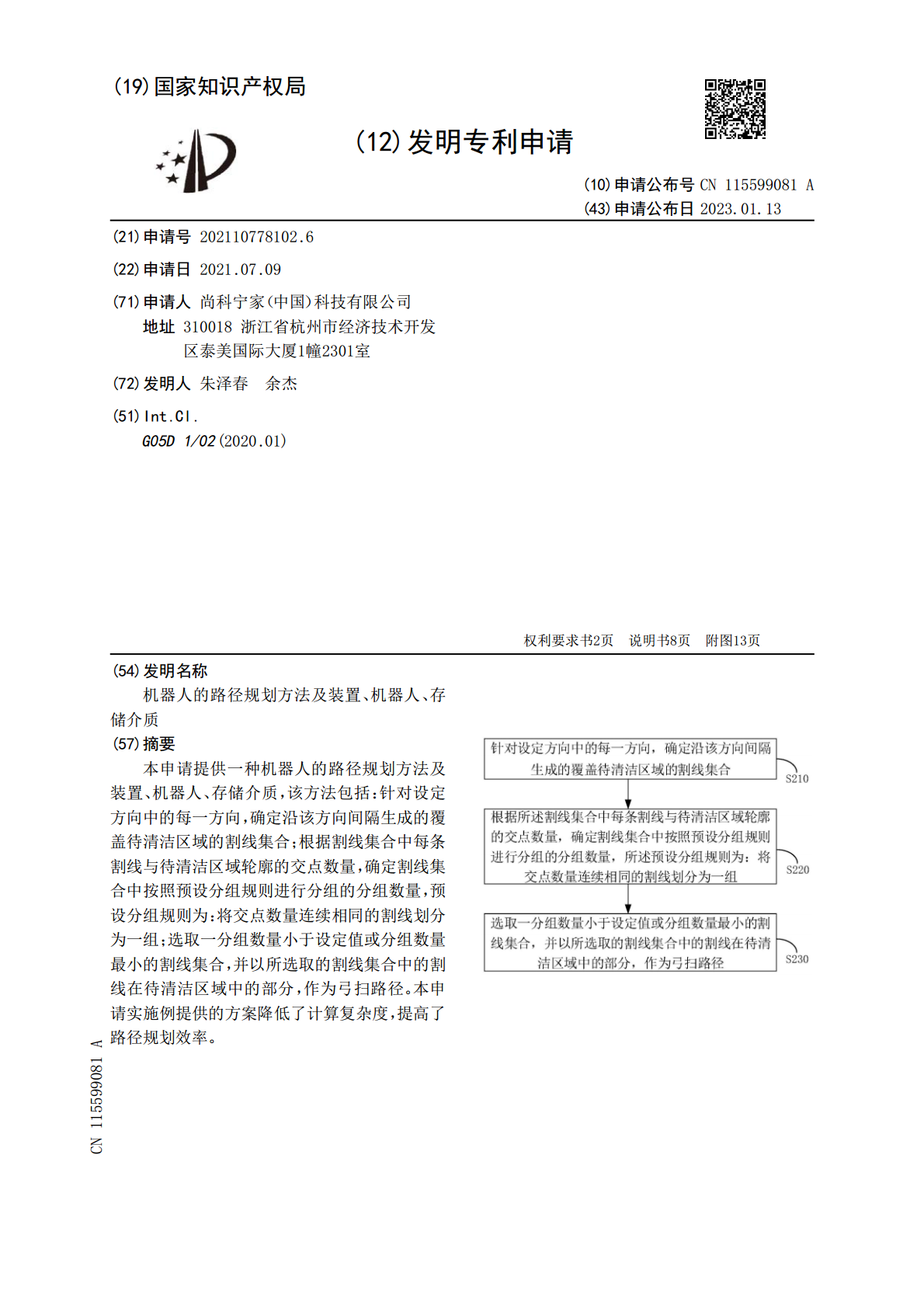
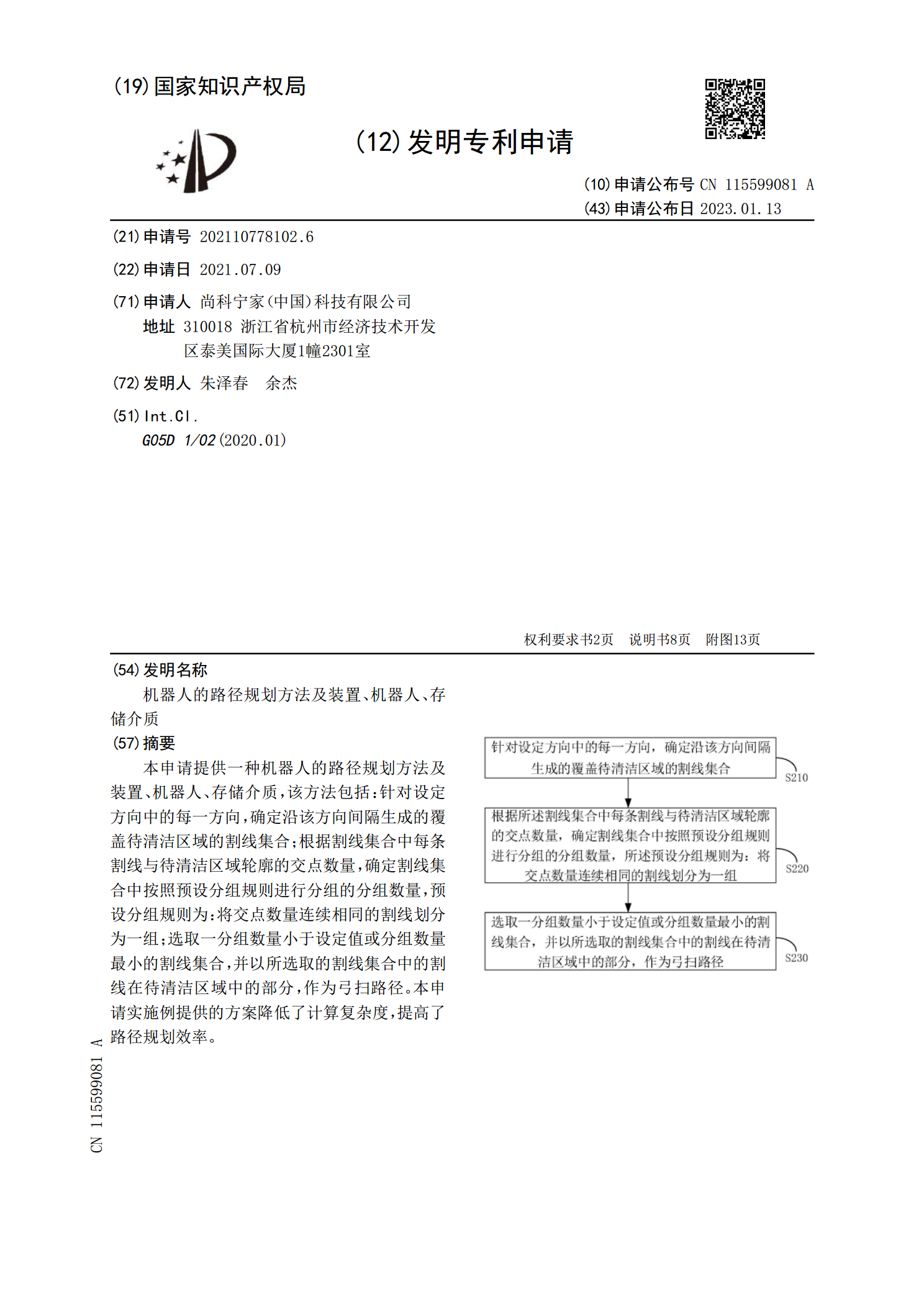
本申请提供一种机器人的路径规划方法及装置、机器人、存储介质,该方法包括:针对设定方向中的每一方向,确定沿该方向间隔生成的覆盖待清洁区域的割线集合;根据割线集合中每条割线与待清洁区域轮廓的交点数量,确定割线集合中按照预设分组规则进行分组的分组数量,预设分组规则为:将交点数量连续相同的割线划分为一组;选取一分组数量小于设定值或分组数量最小的割线集合,并以所选取的割线集合中的割线在待清洁区域中的部分,作为弓扫路径。本申请实施例提供的方案降低了计算复杂度,提高了路径规划效率。
路径规划方法、装置、机器人和存储介质.pdf
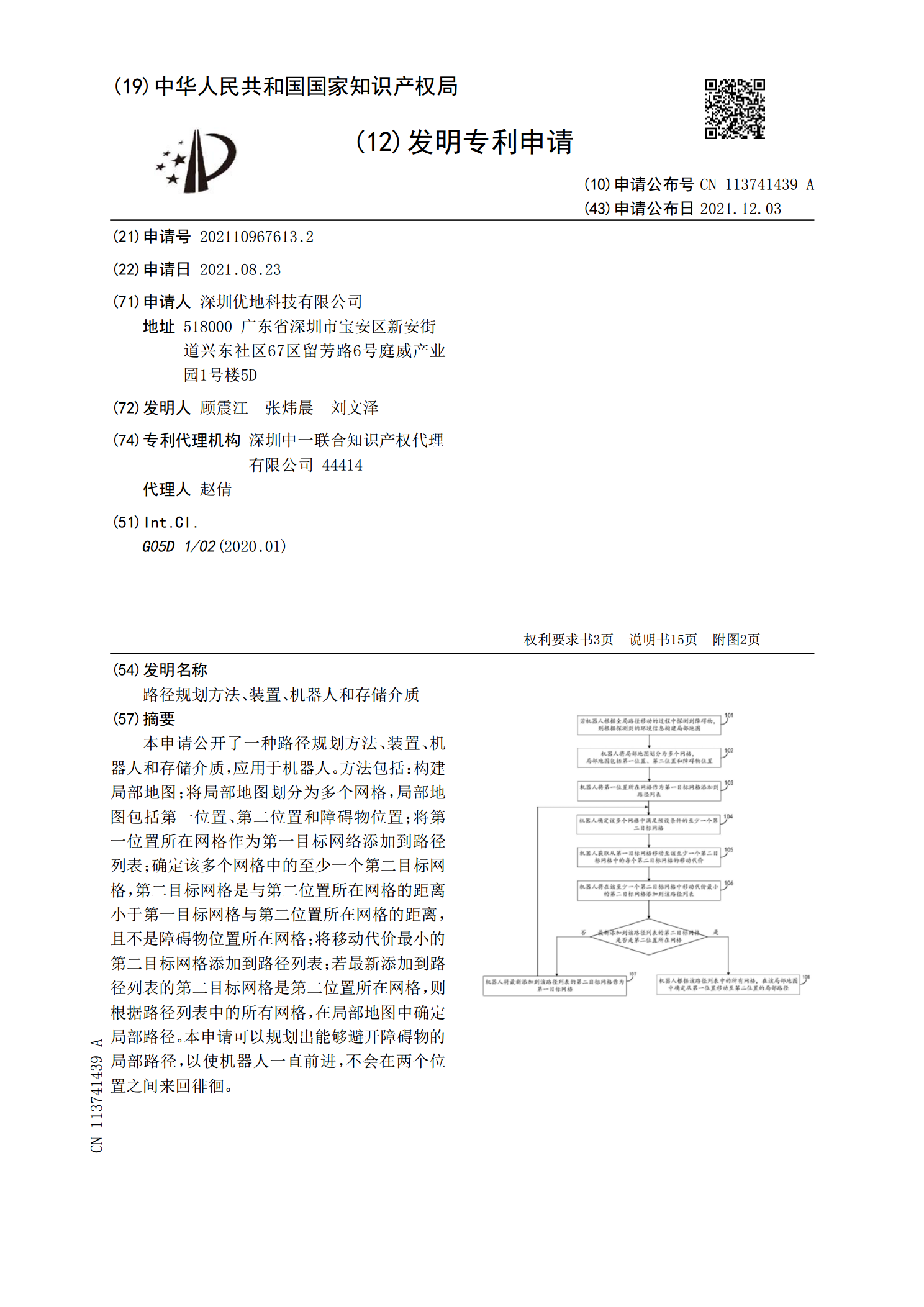
本申请公开了一种路径规划方法、装置、机器人和存储介质,应用于机器人。方法包括:构建局部地图;将局部地图划分为多个网格,局部地图包括第一位置、第二位置和障碍物位置;将第一位置所在网格作为第一目标网络添加到路径列表;确定该多个网格中的至少一个第二目标网格,第二目标网格是与第二位置所在网格的距离小于第一目标网格与第二位置所在网格的距离,且不是障碍物位置所在网格;将移动代价最小的第二目标网格添加到路径列表;若最新添加到路径列表的第二目标网格是第二位置所在网格,则根据路径列表中的所有网格,在局部地图中确定局部路径。
局部路径规划的控制方法及装置、机器人、存储介质.pdf
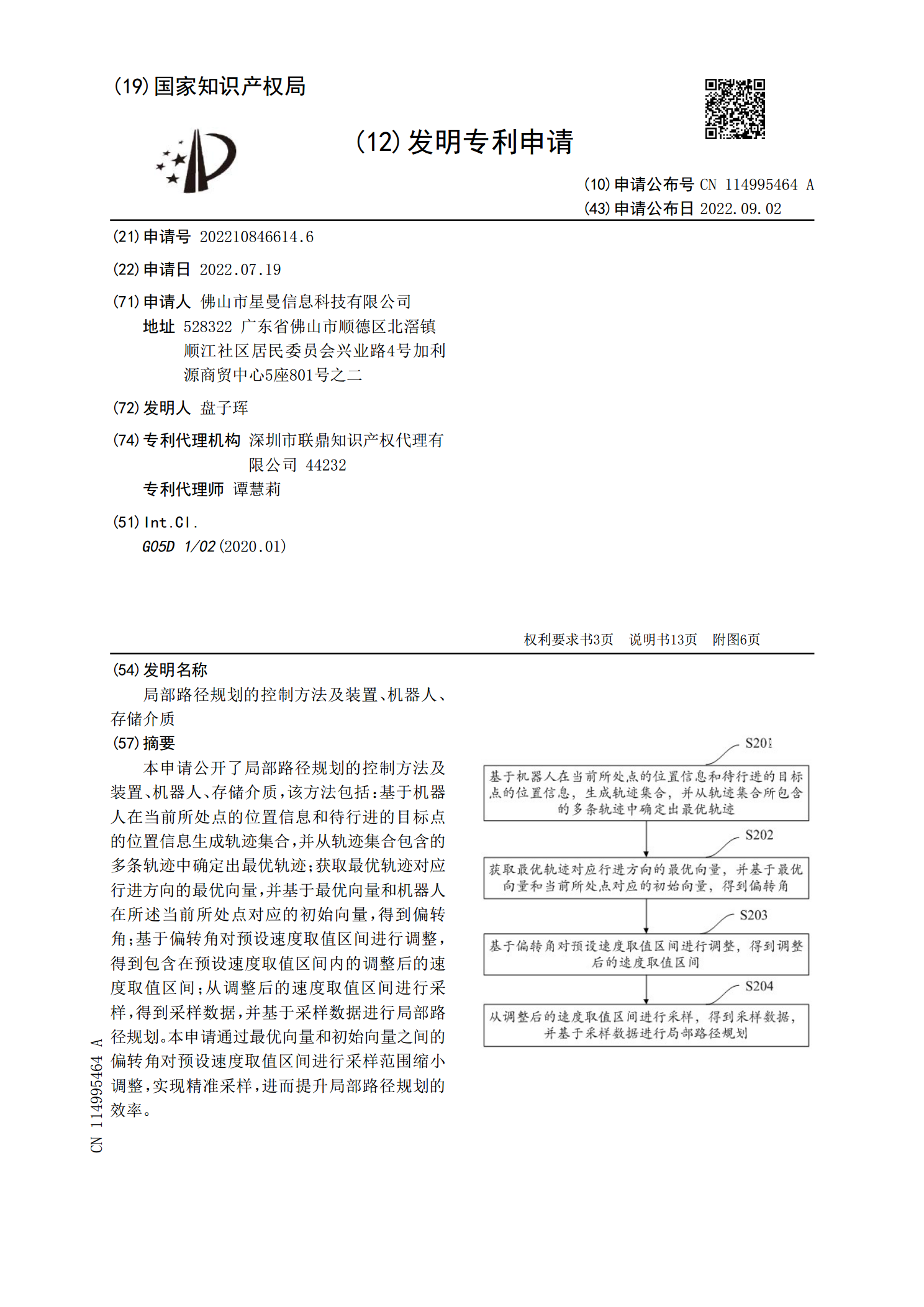
本申请公开了局部路径规划的控制方法及装置、机器人、存储介质,该方法包括:基于机器人在当前所处点的位置信息和待行进的目标点的位置信息生成轨迹集合,并从轨迹集合包含的多条轨迹中确定出最优轨迹;获取最优轨迹对应行进方向的最优向量,并基于最优向量和机器人在所述当前所处点对应的初始向量,得到偏转角;基于偏转角对预设速度取值区间进行调整,得到包含在预设速度取值区间内的调整后的速度取值区间;从调整后的速度取值区间进行采样,得到采样数据,并基于采样数据进行局部路径规划。本申请通过最优向量和初始向量之间的偏转角对预设速度取

机器人路径规划方法和装置、存储介质及控制终端.pdf
本发明公开了一种机器人路径规划方法和装置、存储介质及控制终端,其中,方法包括以下步骤:获取目标任务;将目标任务分解为包含多个动作的动作序列;检测动作序列中任意两相邻动作是否连贯;如果动作序列中存在两相邻动作不连贯,则对动作序列进行优化,以使得到的优化动作序列中任意两相邻动作均连贯。由此,通过对动作序列中任意两相邻动作的连贯性检测,实现目标任务的动作序列优化,从而,减少机器人不必要的动作,节约作业时间和作业能耗,提升机器人的作业效率。

机器人路径规划方法、装置、机器人及计算机可读存储介质.pdf
本发明公开了一种机器人路径规划方法、装置、机器人及计算机可读存储介质,通过观测视觉范围内的目标人体,并在其出现局部动态特征时及时进行捕捉,然后根据局部动态特征确定该目标人体是否存在观察行为,使得机器人能够为目标人体的观察行定性;然后进一步通过判断目标人体对机器人的观察时长确定是否需要对机器人的当前行驶路径进行修改,并在观察时长满足预设条件时,认为该目标人体对机器人存在干扰意图,故而将当前行驶路径进行修改以偏离目标人体,从而使得机器人能够提前规避目标人体的干扰。