
基于双门限剔除策略的高效航迹关联方法.pdf

建英****66

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10

9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于双门限剔除策略的高效航迹关联方法.pdf
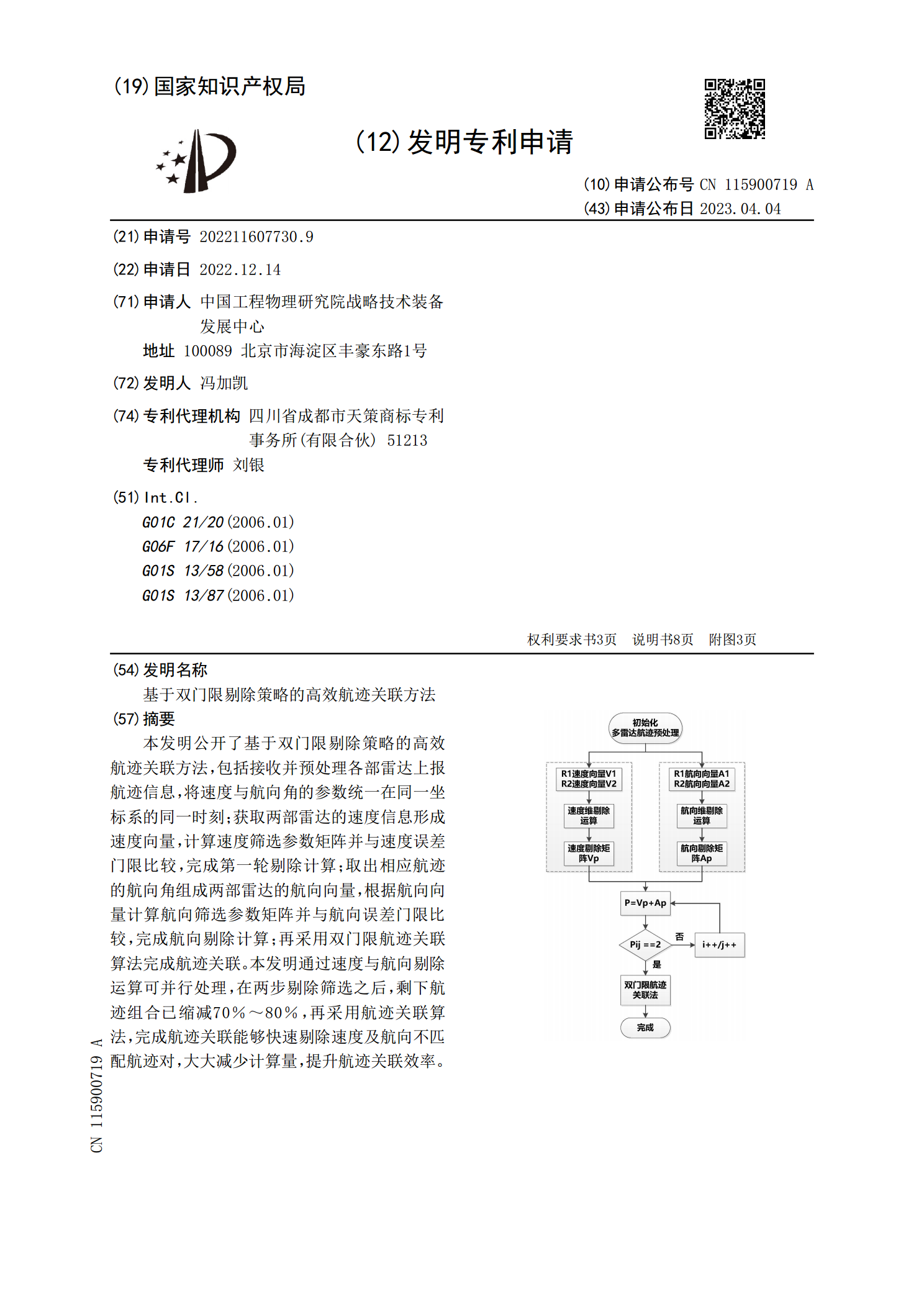
本发明公开了基于双门限剔除策略的高效航迹关联方法,包括接收并预处理各部雷达上报航迹信息,将速度与航向角的参数统一在同一坐标系的同一时刻;获取两部雷达的速度信息形成速度向量,计算速度筛选参数矩阵并与速度误差门限比较,完成第一轮剔除计算;取出相应航迹的航向角组成两部雷达的航向向量,根据航向向量计算航向筛选参数矩阵并与航向误差门限比较,完成航向剔除计算;再采用双门限航迹关联算法完成航迹关联。本发明通过速度与航向剔除运算可并行处理,在两步剔除筛选之后,剩下航迹组合已缩减70%~80%,再采用航迹关联算法,完成航迹

基于统计双门限的中断航迹配对关联算法.docx
基于统计双门限的中断航迹配对关联算法总体介绍随着空中交通不断增多,航空管控的工作量也成倍增长。在空管队员的不懈努力下,空中交通保持着高效有序的状态,但是由于人为因素及其他不可控因素的存在,航迹数据也可能出现误差。难以确定的航迹数据可能会带来严重的后果,甚至威胁到我们的生命安全。因此,精确的航迹数据对于航空管控至关重要。中断航迹配对是航迹关联算法中的一个重要环节。传统的中断航迹配对算法存在一些问题,如数据量大、复杂度高、耗时长等。本文提出基于统计双门限的中断航迹配对关联算法,使用统计分析方法对数据进行筛选,
一种基于辅助信息的航迹关联剔除虚假目标的方法.pdf
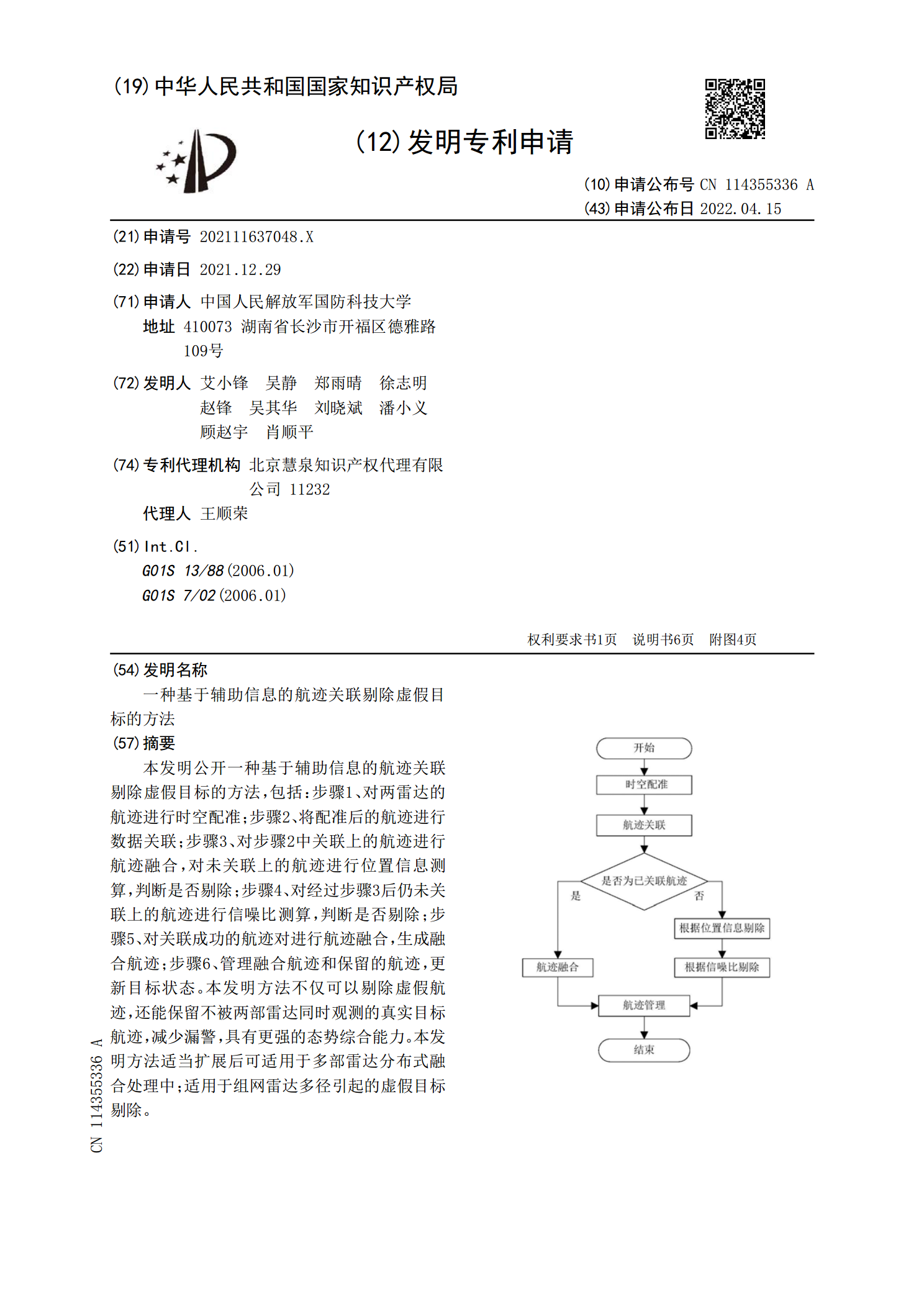
本发明公开一种基于辅助信息的航迹关联剔除虚假目标的方法,包括:步骤1、对两雷达的航迹进行时空配准;步骤2、将配准后的航迹进行数据关联;步骤3、对步骤2中关联上的航迹进行航迹融合,对未关联上的航迹进行位置信息测算,判断是否剔除;步骤4、对经过步骤3后仍未关联上的航迹进行信噪比测算,判断是否剔除;步骤5、对关联成功的航迹对进行航迹融合,生成融合航迹;步骤6、管理融合航迹和保留的航迹,更新目标状态。本发明方法不仅可以剔除虚假航迹,还能保留不被两部雷达同时观测的真实目标航迹,减少漏警,具有更强的态势综合能力。本发

一种基于距离微分的虚假航迹剔除方法.pdf
本发明公开了一种基于距离微分的虚假航迹剔除方法,解决复杂环境下的航迹的高虚警概率和高误告警律的问题,该方法是在原有经典处理算法的基础上增加了航迹距离微分多普勒速度和一次点迹多普勒速度一致性统计判别处理,不仅大幅降低了虚警概率,而且保证了对真实目标的有效跟踪。与现有技术相比,具有以下优点:采用统计方法而不是实时判断,避免了偶尔一次多普勒速度跳变造成航迹跟踪失败的问题;该方法采用计算航迹多普勒和点迹多普勒滤波器通道号差值,避免了航迹多普勒速度和点迹多普勒速度存在模糊,提高了相关正确性;较之传统的处理方法,该方

基于数据拟合的航迹关联方法.docx
基于数据拟合的航迹关联方法基于数据拟合的航迹关联方法摘要:航迹关联是航空交通管理(ATM)领域中一个关键的问题,它用于将多个航空器在时间和空间上进行关联,以便进行有效的交通管理。本论文将介绍基于数据拟合的航迹关联方法,重点在于利用数据拟合技术来准确地匹配和关联多个航迹,以提高航空交通的安全性和效率。1.引言航空交通管理涉及到大量航空器在空中的运动,而正确地将这些航迹进行关联对于确保航空安全和提高效率至关重要。传统的航迹关联方法主要基于数学模型或启发式规则,而这些方法在特定条件下可能会出现短板。数据拟合技术