
激光雷达定位方法及装置.pdf

是飞****文章


1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达定位方法及装置.pdf
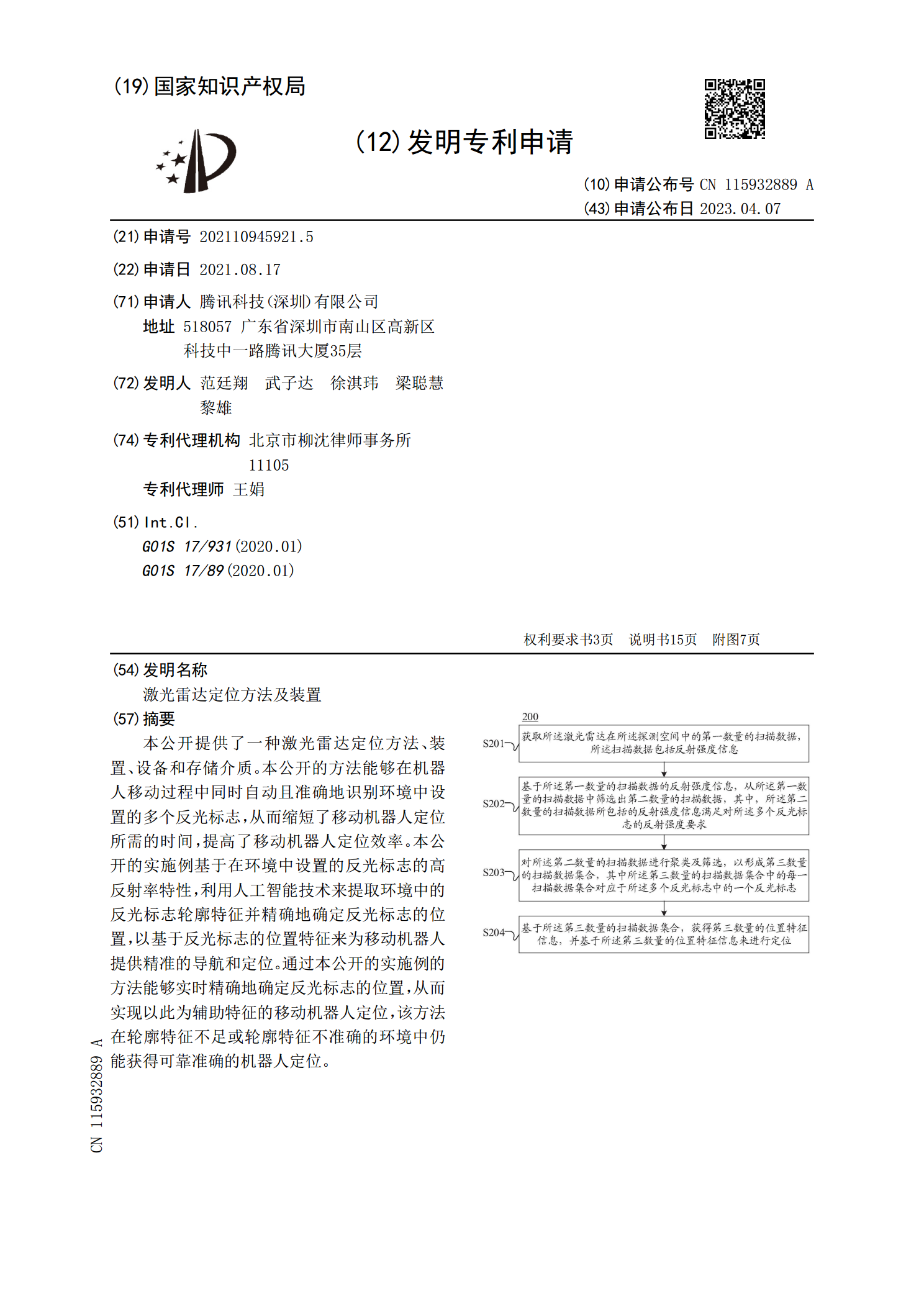
本公开提供了一种激光雷达定位方法、装置、设备和存储介质。本公开的方法能够在机器人移动过程中同时自动且准确地识别环境中设置的多个反光标志,从而缩短了移动机器人定位所需的时间,提高了移动机器人定位效率。本公开的实施例基于在环境中设置的反光标志的高反射率特性,利用人工智能技术来提取环境中的反光标志轮廓特征并精确地确定反光标志的位置,以基于反光标志的位置特征来为移动机器人提供精准的导航和定位。通过本公开的实施例的方法能够实时精确地确定反光标志的位置,从而实现以此为辅助特征的移动机器人定位,该方法在轮廓特征不足或轮
高精度机载激光雷达系统的定位精度检测装置及检测方法.pdf
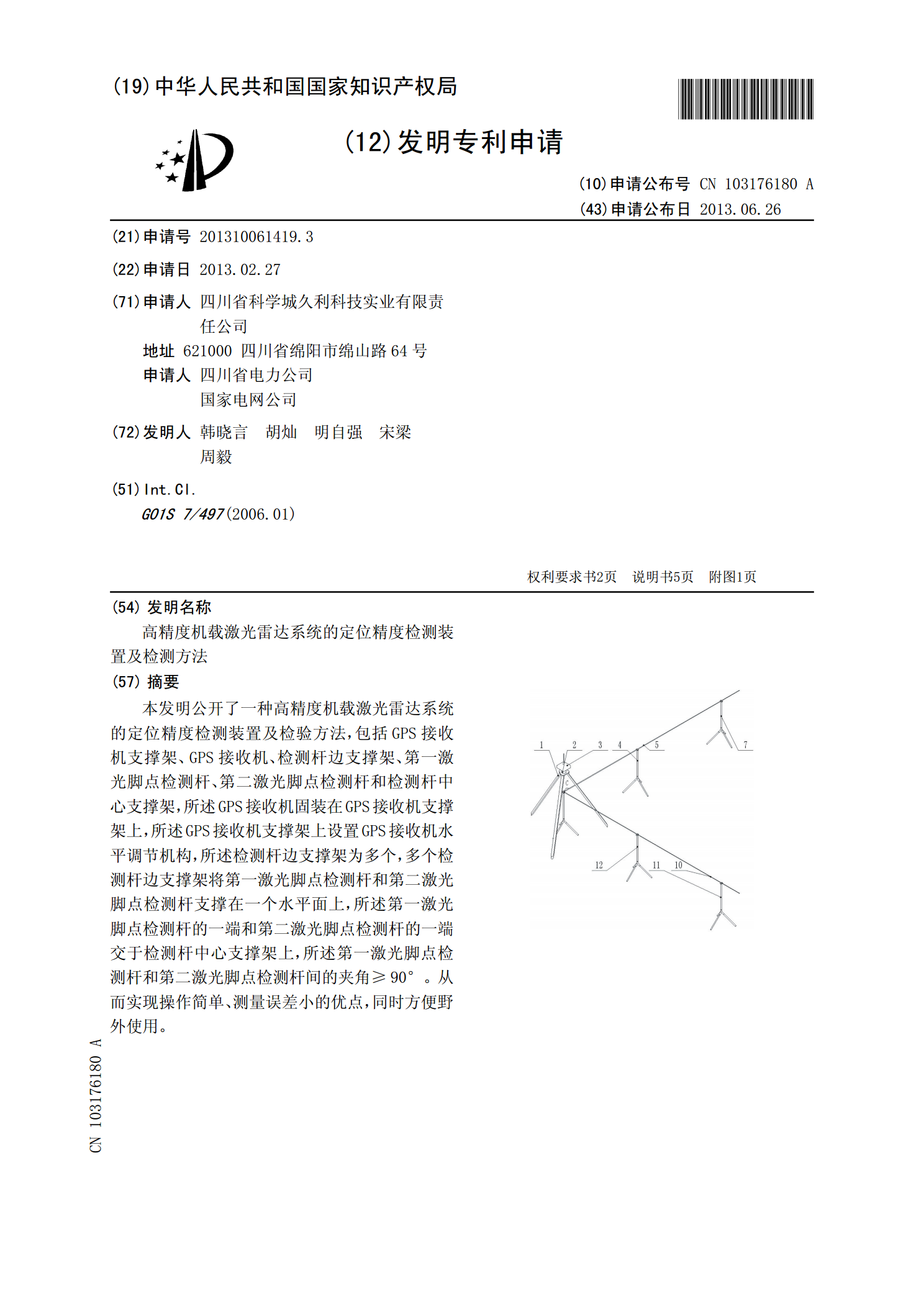
本发明公开了一种高精度机载激光雷达系统的定位精度检测装置及检验方法,包括GPS接收机支撑架、GPS接收机、检测杆边支撑架、第一激光脚点检测杆、第二激光脚点检测杆和检测杆中心支撑架,所述GPS接收机固装在GPS接收机支撑架上,所述GPS接收机支撑架上设置GPS接收机水平调节机构,所述检测杆边支撑架为多个,多个检测杆边支撑架将第一激光脚点检测杆和第二激光脚点检测杆支撑在一个水平面上,所述第一激光脚点检测杆的一端和第二激光脚点检测杆的一端交于检测杆中心支撑架上,所述第一激光脚点检测杆和第二激光脚点检测杆间的夹角

定位装置及使用该定位装置的定位方法.pdf
一种定位装置,包括开设有收容部的基体及安装于该基体上的销钉组件,该销钉组件包括固定于该基体上的销套和贯穿该销套的销钉,该销套包括开设有胀开槽的定位套,该销钉贯穿该定位套,且形成有斜面,该定位装置还包含收容于该收容部内并与该销钉连接的驱动件,该基体开设有与该收容部连通的进气口,该销钉沿轴向开设有与该收容部连通的进气通道,该销钉周壁沿径向间隔设置有若干通孔,该若干通孔分别贯穿该销钉的侧壁并与该销钉的进气通道相连通。本发明的定位装置不仅能够提高定位精度,同时能够将残留在销钉外表面的杂质吹开,避免杂质影响对工件的
定位装置及定位方法.pdf
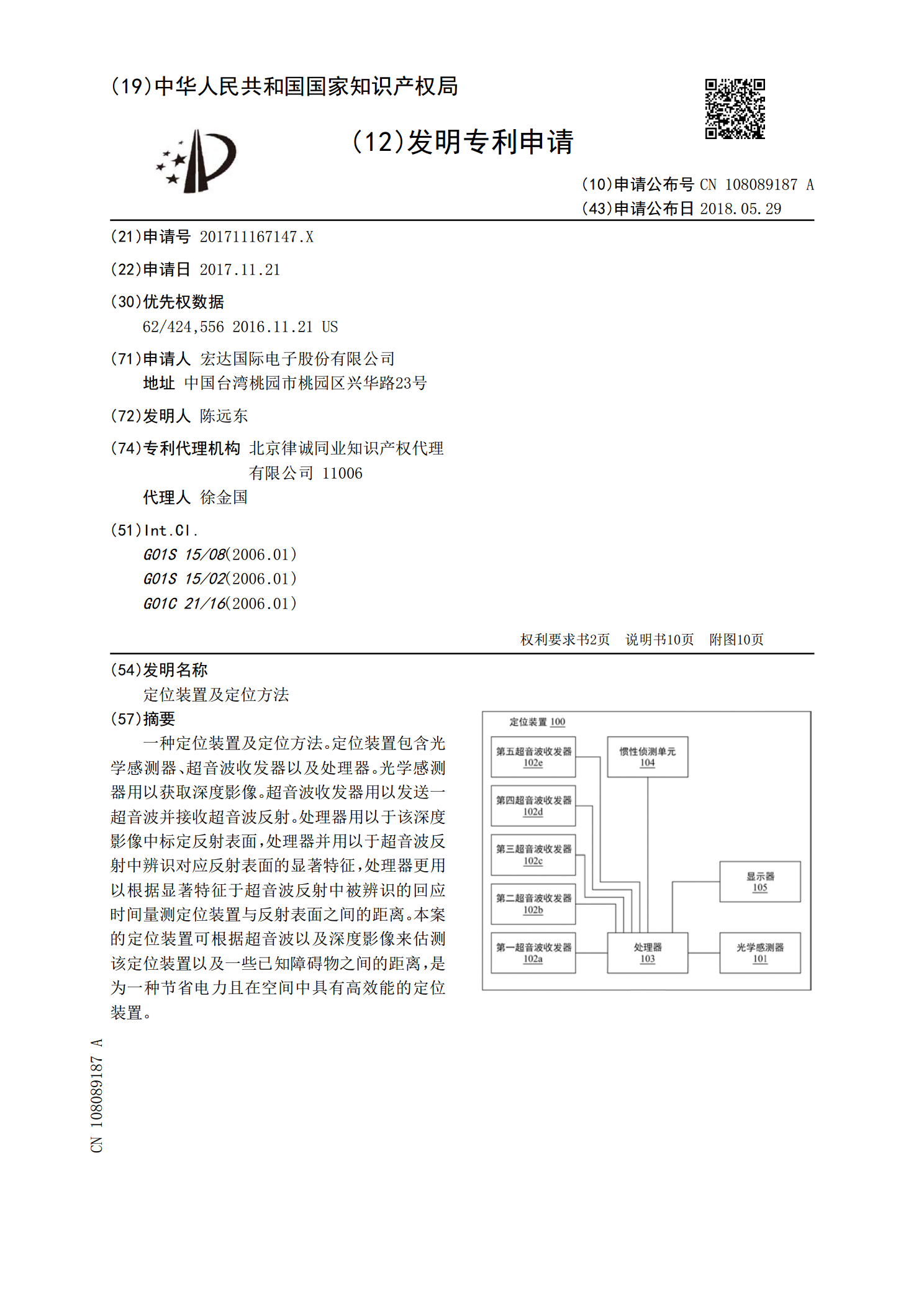
一种定位装置及定位方法。定位装置包含光学感测器、超音波收发器以及处理器。光学感测器用以获取深度影像。超音波收发器用以发送一超音波并接收超音波反射。处理器用以于该深度影像中标定反射表面,处理器并用以于超音波反射中辨识对应反射表面的显著特征,处理器更用以根据显著特征于超音波反射中被辨识的回应时间量测定位装置与反射表面之间的距离。本案的定位装置可根据超音波以及深度影像来估测该定位装置以及一些已知障碍物之间的距离,是为一种节省电力且在空间中具有高效能的定位装置。
定位装置及定位方法.pdf
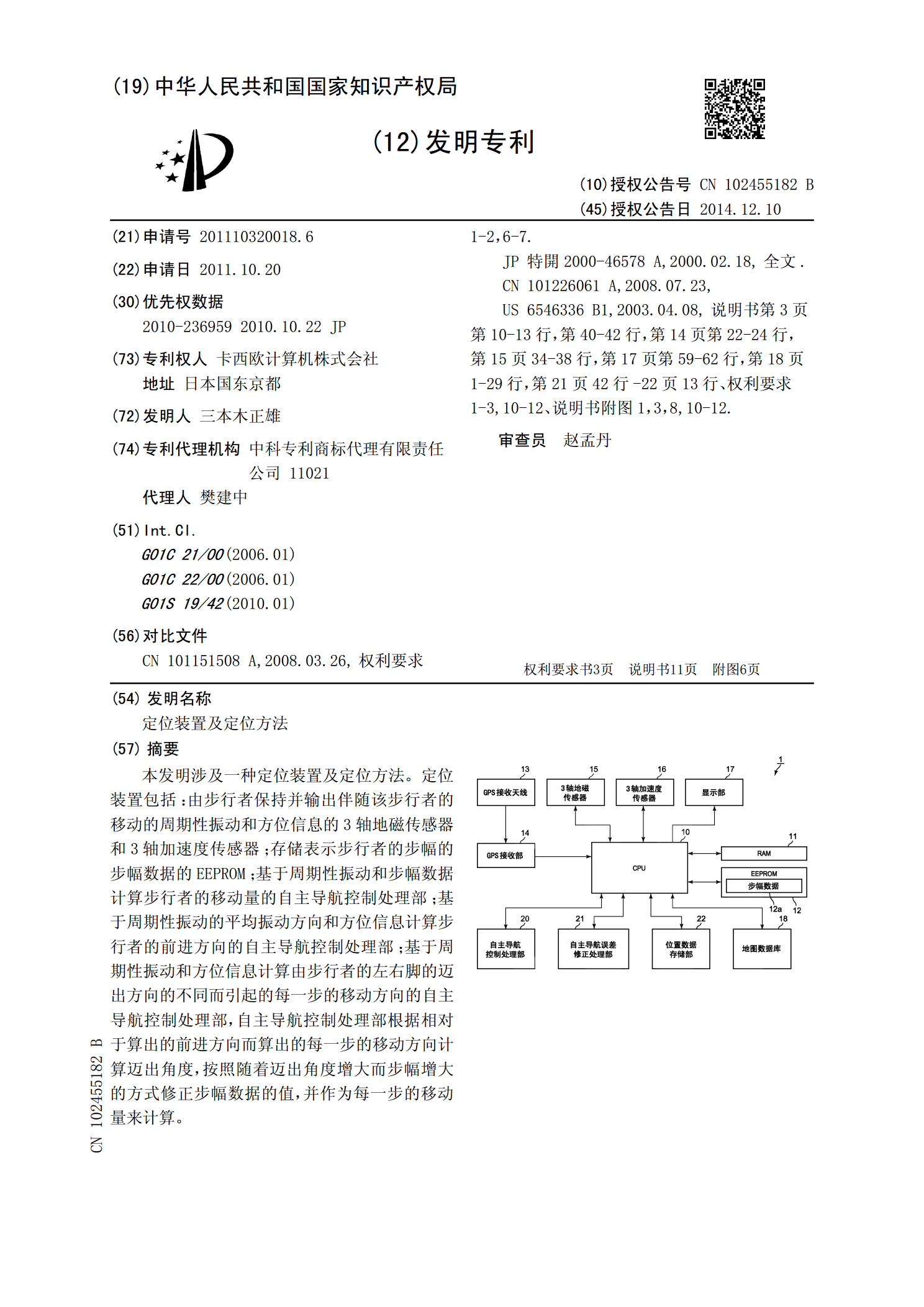
本发明涉及一种定位装置及定位方法。定位装置包括:由步行者保持并输出伴随该步行者的移动的周期性振动和方位信息的3轴地磁传感器和3轴加速度传感器;存储表示步行者的步幅的步幅数据的EEPROM;基于周期性振动和步幅数据计算步行者的移动量的自主导航控制处理部;基于周期性振动的平均振动方向和方位信息计算步行者的前进方向的自主导航控制处理部;基于周期性振动和方位信息计算由步行者的左右脚的迈出方向的不同而引起的每一步的移动方向的自主导航控制处理部,自主导航控制处理部根据相对于算出的前进方向而算出的每一步的移动方向计算迈