
VR手柄定位方法、装置、电子设备及可读存储介质.pdf

一只****呀淑


1/10

2/10

3/10

4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
VR手柄定位方法、装置、电子设备及可读存储介质.pdf
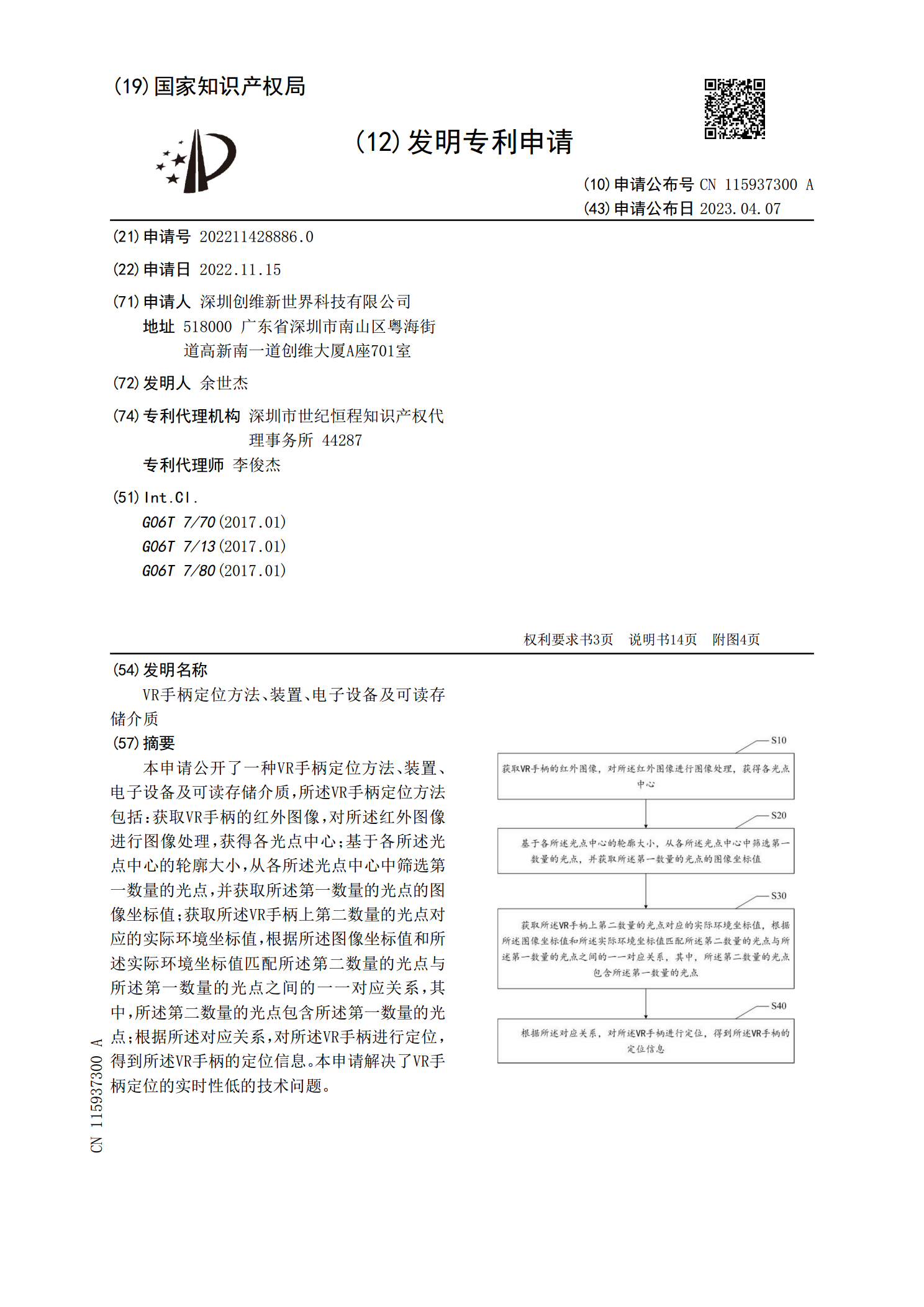
本申请公开了一种VR手柄定位方法、装置、电子设备及可读存储介质,所述VR手柄定位方法包括:获取VR手柄的红外图像,对所述红外图像进行图像处理,获得各光点中心;基于各所述光点中心的轮廓大小,从各所述光点中心中筛选第一数量的光点,并获取所述第一数量的光点的图像坐标值;获取所述VR手柄上第二数量的光点对应的实际环境坐标值,根据所述图像坐标值和所述实际环境坐标值匹配所述第二数量的光点与所述第一数量的光点之间的一一对应关系,其中,所述第二数量的光点包含所述第一数量的光点;根据所述对应关系,对所述VR手柄进行定位,得

VR手柄区分方法、装置、电子设备和存储介质.pdf
本申请提出一种VR手柄区分方法、装置、电子设备和存储介质,其中,方法包括:确定VR设备的转动角度;根据转动角度,确定VR设备对应的一对VR手柄中每个手柄的坐标信息;根据坐标信息,确定一对VR手柄中的左持手柄和右持手柄。由此,通过根据VR设备的转动角度,确定每个手柄的坐标信息,并根据每个手柄的坐标信息区分左持手柄和右持手柄,从而无论用户如何旋转,都可以正确区分左持手柄和右持手柄,提高了区分左右手柄的准确性。
定位方法、装置、电子设备及可读存储介质.pdf
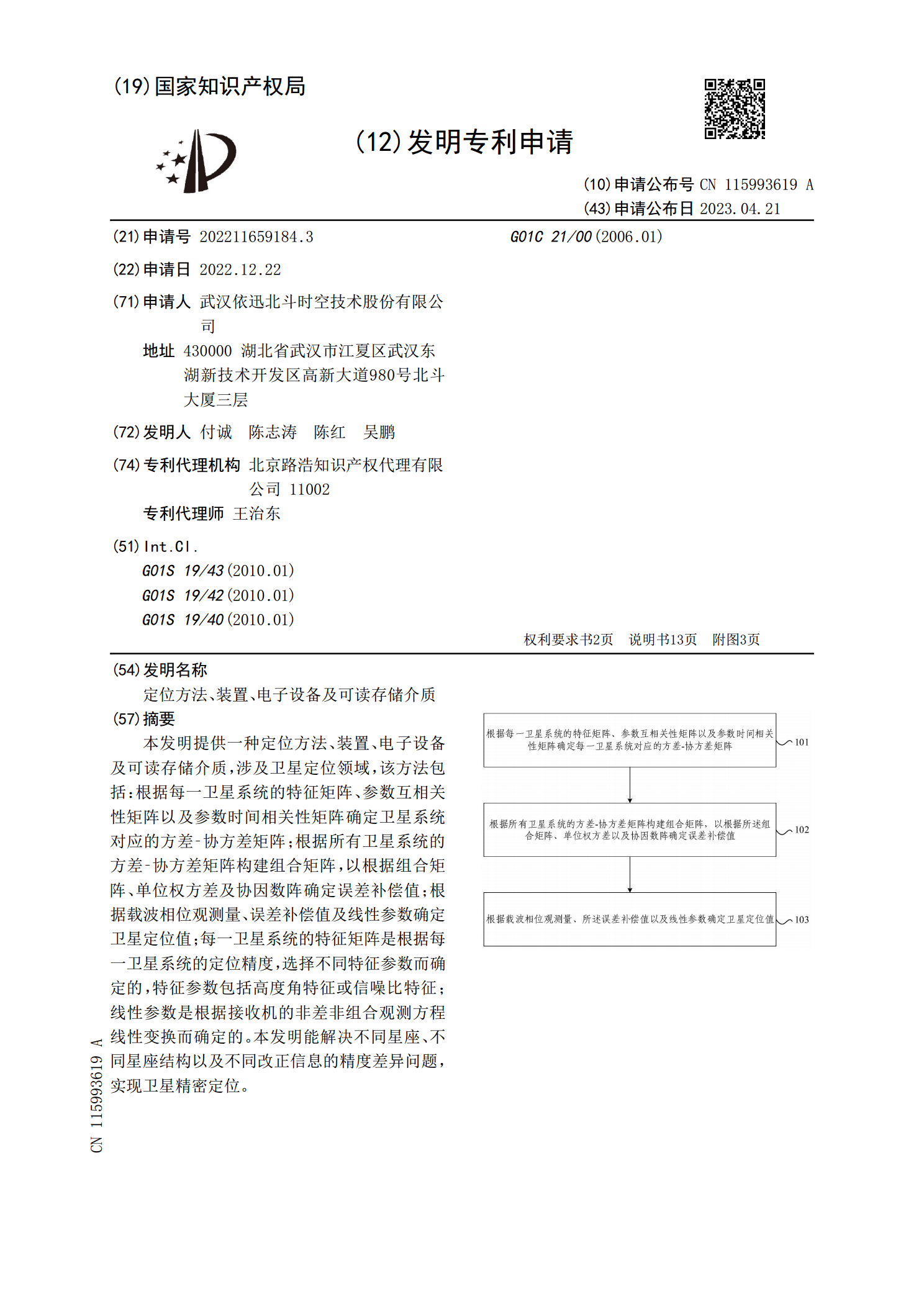
本发明提供一种定位方法、装置、电子设备及可读存储介质,涉及卫星定位领域,该方法包括:根据每一卫星系统的特征矩阵、参数互相关性矩阵以及参数时间相关性矩阵确定卫星系统对应的方差‑协方差矩阵;根据所有卫星系统的方差‑协方差矩阵构建组合矩阵,以根据组合矩阵、单位权方差及协因数阵确定误差补偿值;根据载波相位观测量、误差补偿值及线性参数确定卫星定位值;每一卫星系统的特征矩阵是根据每一卫星系统的定位精度,选择不同特征参数而确定的,特征参数包括高度角特征或信噪比特征;线性参数是根据接收机的非差非组合观测方程线性变换而确定
光标位置定位方法、装置、电子设备及可读存储介质.pdf
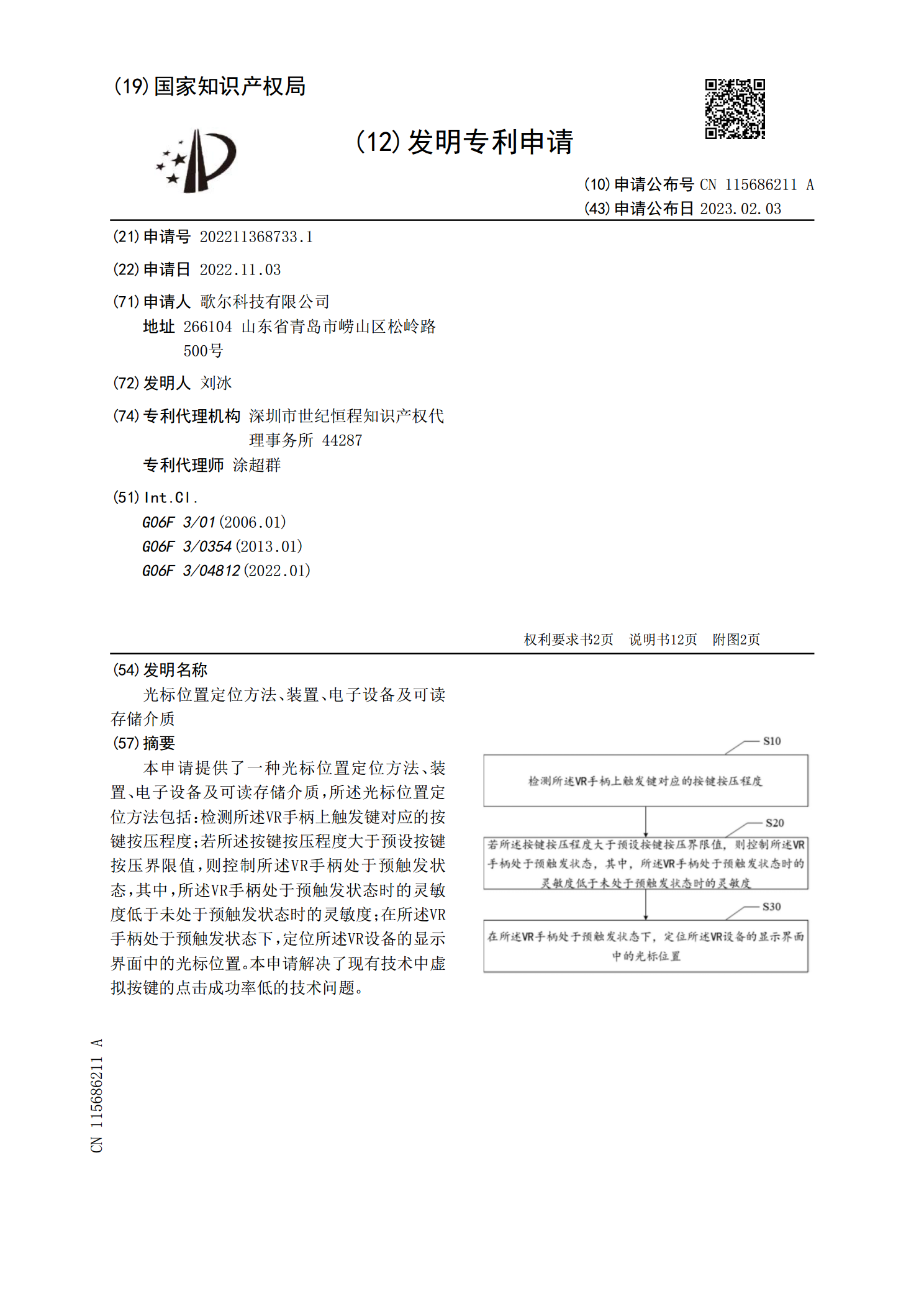
本申请提供了一种光标位置定位方法、装置、电子设备及可读存储介质,所述光标位置定位方法包括:检测所述VR手柄上触发键对应的按键按压程度;若所述按键按压程度大于预设按键按压界限值,则控制所述VR手柄处于预触发状态,其中,所述VR手柄处于预触发状态时的灵敏度低于未处于预触发状态时的灵敏度;在所述VR手柄处于预触发状态下,定位所述VR设备的显示界面中的光标位置。本申请解决了现有技术中虚拟按键的点击成功率低的技术问题。
证件定位方法、装置、电子设备以及可读存储介质.pdf
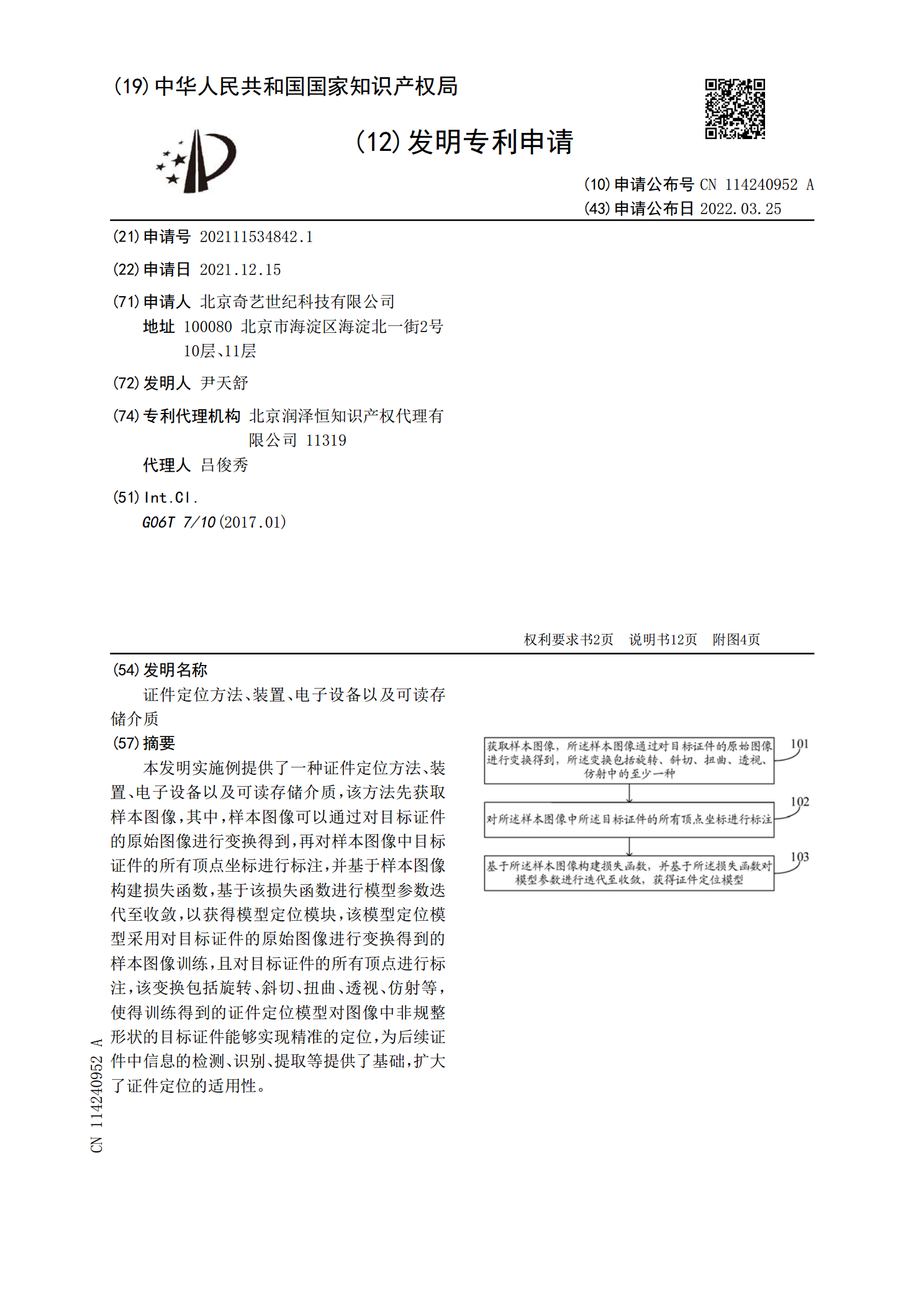
本发明实施例提供了一种证件定位方法、装置、电子设备以及可读存储介质,该方法先获取样本图像,其中,样本图像可以通过对目标证件的原始图像进行变换得到,再对样本图像中目标证件的所有顶点坐标进行标注,并基于样本图像构建损失函数,基于该损失函数进行模型参数迭代至收敛,以获得模型定位模块,该模型定位模型采用对目标证件的原始图像进行变换得到的样本图像训练,且对目标证件的所有顶点进行标注,该变换包括旋转、斜切、扭曲、透视、仿射等,使得训练得到的证件定位模型对图像中非规整形状的目标证件能够实现精准的定位,为后续证件中信息的