
基于参数辨识的永磁同步直线电机循环神经网络多维观测器.docx

18****28


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于参数辨识的永磁同步直线电机循环神经网络多维观测器.docx
基于参数辨识的永磁同步直线电机循环神经网络多维观测器1.内容描述本项目旨在研究基于参数辨识的永磁同步直线电机循环神经网络多维观测器。通过对永磁同步直线电机的控制策略进行分析,提出了一种基于参数辨识的方法来实现对电机参数的实时估计。利用循环神经网络(RNN)对电机状态进行建模,以提高参数辨识的准确性。结合多维观测器原理,设计了一种高效的多维观测器,用于实现对电机运行状态的精确测量。在实验部分,首先搭建了永磁同步直线电机控制系统,并通过实际运行数据对其进行了参数辨识。利用训练好的循环神经网络模型对电机参数进行

基于参数辨识的高性能永磁同步电机控制策略研究.docx
基于参数辨识的高性能永磁同步电机控制策略研究一、概述随着能源危机和环境污染问题日益严重,高效、节能、环保的永磁同步电机(PMSM)逐渐成为工业界和学术界的研究热点。作为一种具有高功率密度、高效率、高可靠性等优点的电机类型,永磁同步电机在电动汽车、风力发电、数控机床等领域得到了广泛应用。要实现永磁同步电机的高性能运行,关键在于其控制策略的研发。控制策略的核心在于如何准确、快速地辨识电机参数,并根据这些参数调整控制算法以达到最优控制效果。参数辨识是指通过一定的实验方法或算法,从电机的运行数据中提取出电机参数的
一种基于扰动观测器的永磁直线同步电机.pdf
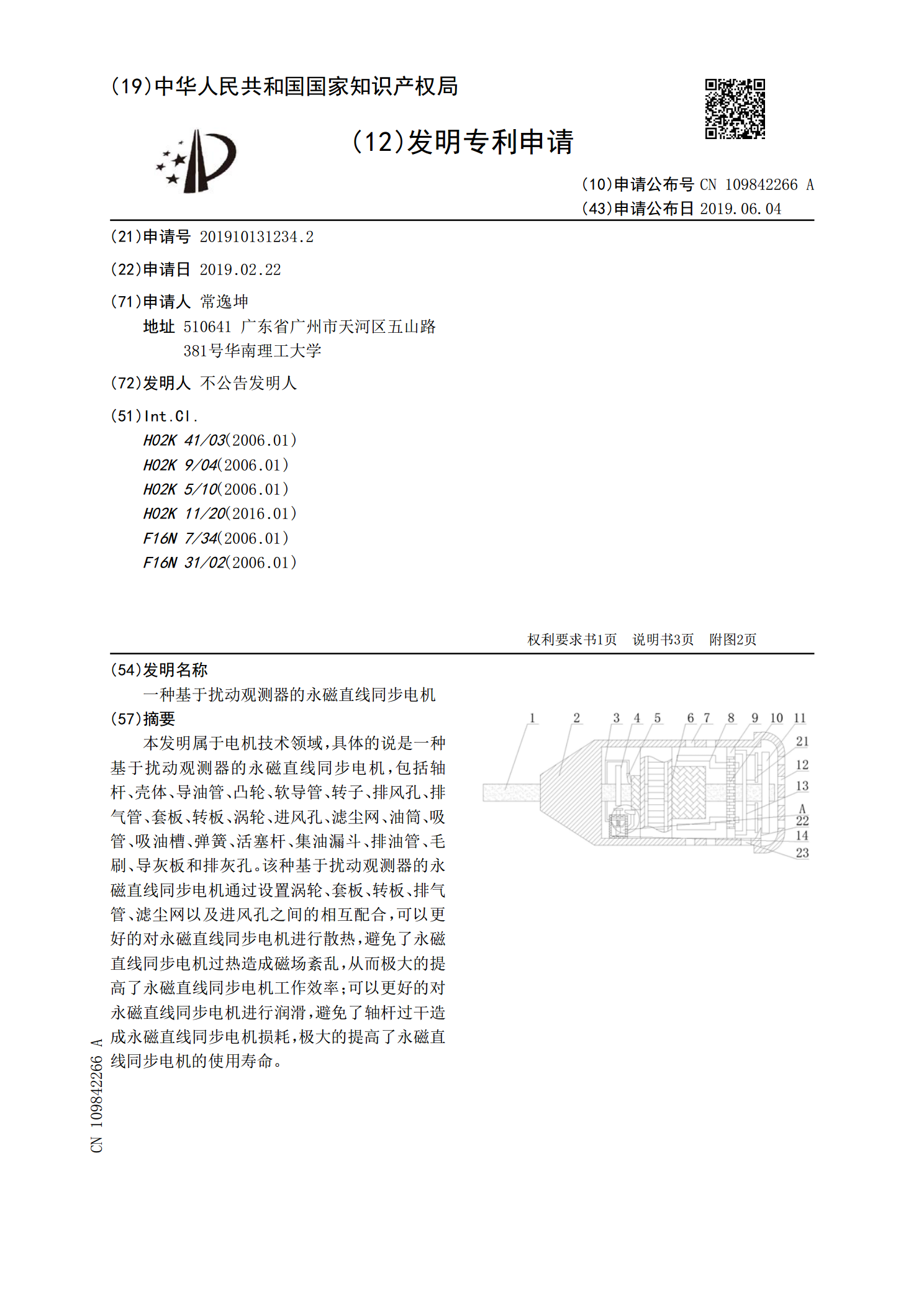
本发明属于电机技术领域,具体的说是一种基于扰动观测器的永磁直线同步电机,包括轴杆、壳体、导油管、凸轮、软导管、转子、排风孔、排气管、套板、转板、涡轮、进风孔、滤尘网、油筒、吸管、吸油槽、弹簧、活塞杆、集油漏斗、排油管、毛刷、导灰板和排灰孔。该种基于扰动观测器的永磁直线同步电机通过设置涡轮、套板、转板、排气管、滤尘网以及进风孔之间的相互配合,可以更好的对永磁直线同步电机进行散热,避免了永磁直线同步电机过热造成磁场紊乱,从而极大的提高了永磁直线同步电机工作效率;可以更好的对永磁直线同步电机进行润滑,避免了轴杆
永磁同步电机参数辨识方法及装置.pdf
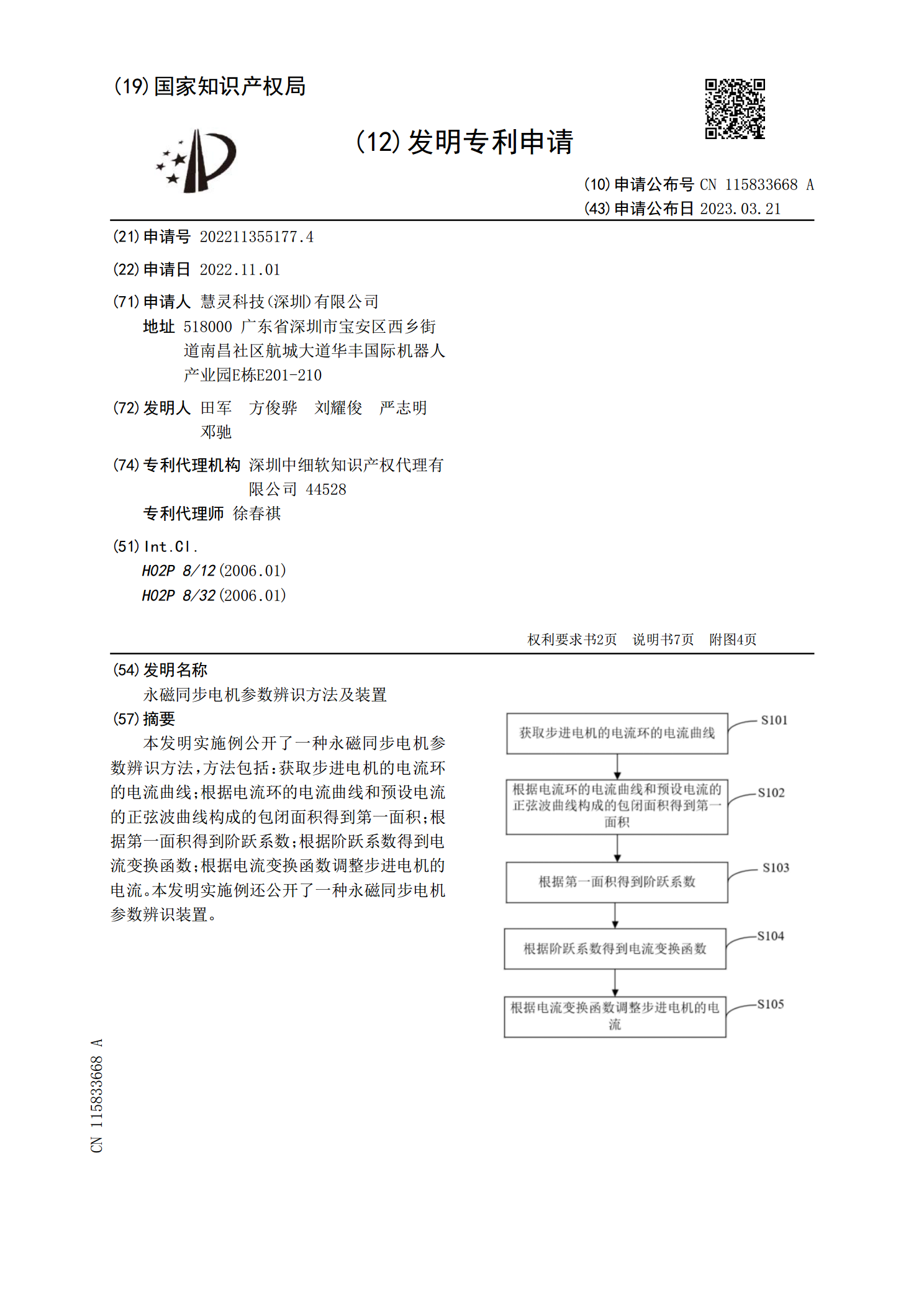
本发明实施例公开了一种永磁同步电机参数辨识方法,方法包括:获取步进电机的电流环的电流曲线;根据电流环的电流曲线和预设电流的正弦波曲线构成的包闭面积得到第一面积;根据第一面积得到阶跃系数;根据阶跃系数得到电流变换函数;根据电流变换函数调整步进电机的电流。本发明实施例还公开了一种永磁同步电机参数辨识装置。

基于改进象群游牧算法永磁同步电机参数辨识方法.pdf
基于改进象群游牧算法永磁同步电机参数辨识方法,属于同步电机控制系统领域,包括以下步骤:一、基于PMSM在dq轴同步旋转坐标系下的电压方程,将方程离散化后采用在定子d轴注入负序电流的策略,从而得到满秩的离散电压方程;二、改进象群游牧算法,使用Tent映射和反向学习,提升算法收敛性,并对原本算法中氏族位置更新和分离操作公式进行更改,缓解了迭代过程中更新位置贫化问题;三、建立改进象群游牧算法和永磁同步电机参数辨识的关系;四、基于改进象群游牧算法对PMSM中4个关键参数进行辨识。本方法使用改进智能算法,一次性同时