
基于改进象群游牧算法永磁同步电机参数辨识方法.pdf

一吃****春晓


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于改进象群游牧算法永磁同步电机参数辨识方法.pdf
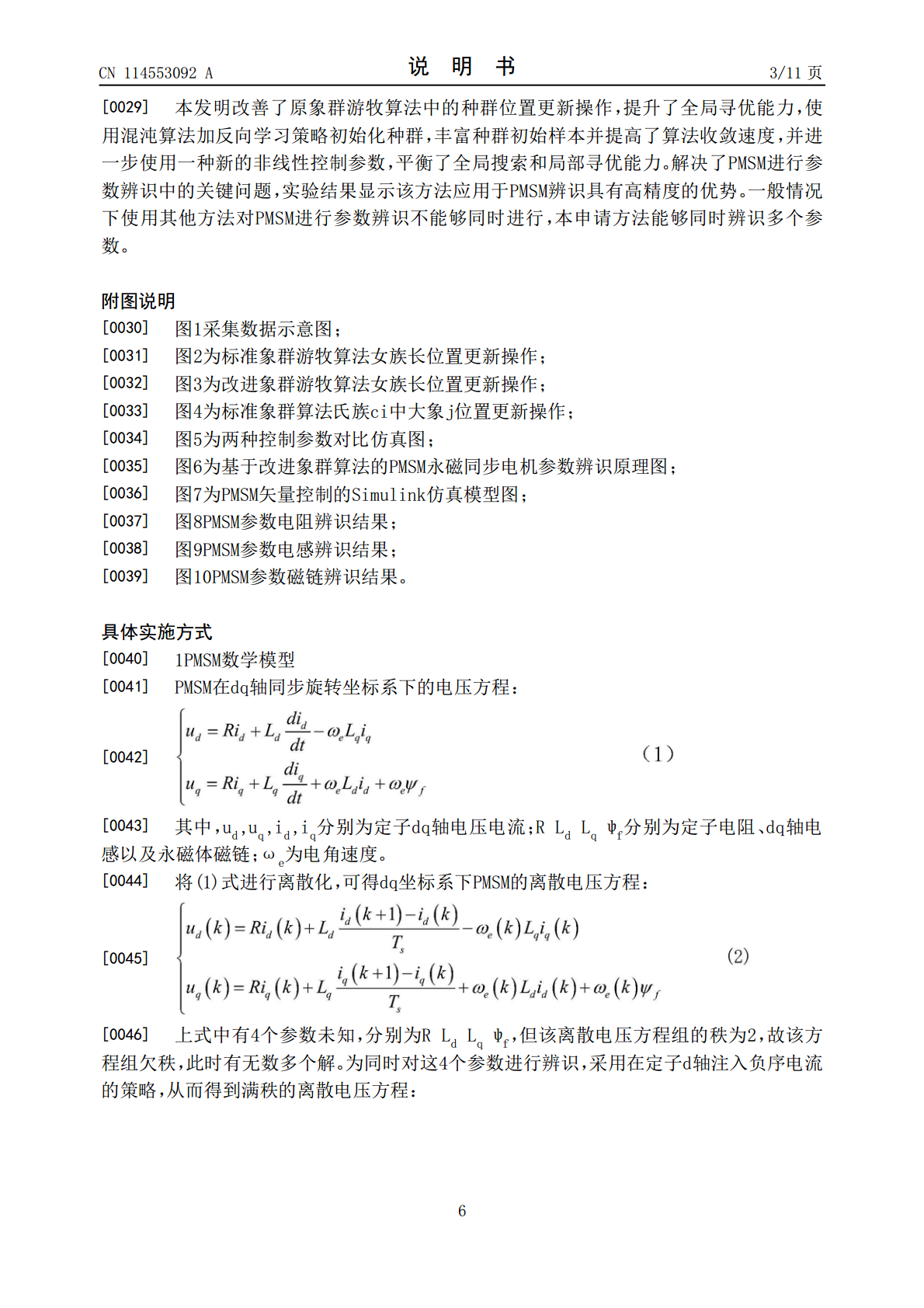
基于改进象群游牧算法永磁同步电机参数辨识方法,属于同步电机控制系统领域,包括以下步骤:一、基于PMSM在dq轴同步旋转坐标系下的电压方程,将方程离散化后采用在定子d轴注入负序电流的策略,从而得到满秩的离散电压方程;二、改进象群游牧算法,使用Tent映射和反向学习,提升算法收敛性,并对原本算法中氏族位置更新和分离操作公式进行更改,缓解了迭代过程中更新位置贫化问题;三、建立改进象群游牧算法和永磁同步电机参数辨识的关系;四、基于改进象群游牧算法对PMSM中4个关键参数进行辨识。本方法使用改进智能算法,一次性同时

基于改进鲸鱼算法的永磁同步电机多参数辨识方法及系统.pdf
本公开属于电机参数识别技术领域,具提供了一种基于改进鲸鱼算法的永磁同步电机多参数辨识方法及系统,包括以下步骤:获取永磁同步电机在d‑q坐标系下的状态方程;对所获取的状态方程进行离散化处理,分别计算是否存在d轴电流时的离散电压方程,构建电机满秩方程组;计算所构建的电机满秩方程组的适应度函数;基于改进的鲸鱼算法进行所述适应度函数的优化求解,得到最优辨识的多参数。

基于改进灰狼优化算法的永磁同步电机参数辨识.docx
基于改进灰狼优化算法的永磁同步电机参数辨识基于改进灰狼优化算法的永磁同步电机参数辨识摘要:永磁同步电机是一种广泛用于工业领域的电机,准确的参数辨识对于电机的控制和性能优化至关重要。本文提出了一种基于改进灰狼优化算法的永磁同步电机参数辨识方法。首先介绍了永磁同步电机的工作原理和数学模型。然后详细描述了灰狼优化算法及其不足之处,并提出了改进的算法。通过仿真实验和实际实验对比,结果表明该算法能够更准确地辨识永磁同步电机的参数。本文的研究成果对于电机的控制和优化具有重要的参考价值。关键词:永磁同步电机;参数辨识;

基于MRAS的改进永磁同步电机参数辨识方法.docx
基于MRAS的改进永磁同步电机参数辨识方法引言现代电力驱动系统中,永磁同步电机作为一种高效的电机,广泛应用于电动车、磁悬浮列车、机床等领域。而永磁同步电机的参数辨识则是电机控制中一个极关键的问题。本文将介绍基于MRAS(ModelReferenceAdaptiveSystem)的改进永磁同步电机参数辨识方法。一、永磁同步电机控制方法永磁同步电机的控制方法主要有基于模型的控制方法和基于无模型的控制方法两种。其中,基于模型的控制方法可以采用矢量控制、直接转矩控制等方法,实现精准的转速和转矩控制。而基于无模型的

基于改进混沌粒子群优化算法的永磁同步电机参数辨识.docx
基于改进混沌粒子群优化算法的永磁同步电机参数辨识标题:基于改进混沌粒子群优化算法的永磁同步电机参数辨识摘要:随着永磁同步电机在工业和交通领域的广泛应用,准确参数辨识变得至关重要。传统的参数辨识方法受限于收敛速度和全局最优解的搜索能力,因此需要更好的优化算法来改进参数辨识的效果。本文提出了基于改进混沌粒子群优化算法的永磁同步电机参数辨识方法。通过引入混沌序列来增加搜索的多样性,同时优化粒子群算法的收敛速度和搜索精度。在实际电机系统中进行了实验验证,并与传统的优化算法进行了对比。结果表明,本文提出的算法在参数