
一种基于组合差分GNSS的桥梁形变多频动态分析方法.pdf

是立****92


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于组合差分GNSS的桥梁形变多频动态分析方法.pdf
本发明公开了一种基于组合差分GNSS的桥梁形变多频动态分析方法,涉及桥梁形变监测技术领域。利用正交小波快速分解算法处理桥梁GNSS监测信号,将分析信号在不同频带上分离,并对形变信号进行多尺度分析,利用高频信号分析桥梁在风力、车辆通行或其他地震灾害等外力作用下的瞬间位移,利用降噪后的低频信号分析桥梁动态变形体的形变轨迹,最后利用上述分析结果进一步分析桥梁形变趋势,因此,本发明通过分析GNSS监测信号中不同频率的特性,可有效地对桥梁的静力响应和动力响应进行分解,解决了现有的桥梁监测系统中,无法判断桥梁三维位移

一种基于差分GNSS技术的船舶超高碰撞桥梁预警方法.pdf
本发明公开了一种基于差分GNSS技术的船舶超高碰撞桥梁预警方法,包括如下步骤:S1)基于差分GNSS对桥梁进行高程静态精确测量,获得每座桥梁的高程;S2)基于差分GNSS对船舶进行高程动态精确测量;S3)在通航至桥区水域时将此时船舶高程与之前已测量的该桥梁的高程进行对比,判断船舶能否安全通过桥梁。本发明提供的基于差分GNSS技术的船舶超高碰撞桥梁预警方法,能够精确计算桥孔和船舶的高程,提高测量精度,较好地满足了船舶超高碰撞桥梁的预警要求,大大提高了船舶通航的安全性。

一种基于差分GNSS的相对导航方法.pdf
本发明公开一种基于差分GNSS的相对导航方法,利用飞行器上安装的惯性测量器件对由于外力产生的两星相对机动加速度进行实时估计,并根据系统时间与GNSS的时间差对GNSS输出的相对位置信息进行补偿,得到当前时刻的测量值,同时利用绝对姿态确定输出的惯性系相对本体系四元数、以及目标星的轨道信息解算本体系、惯性系、目标星轨道系三者之间的转换关系,将加速度和相对位置信息统一到目标星轨道系下,最终采用卡尔曼滤波解算两星的相对位置,并设计数据跳变故障处理机制,根据卡尔曼滤波收敛后修正值的大小,对导航滤波的修正量进行限幅,

一种基于宽带OFDM系统频变多普勒频移的估计方法.pdf
本发明公开一种基于宽带OFDM系统频变多普勒频移的估计方法,信号通过无线信道进行传输,当收发两端存在相对运动时,接收信号与发送信号间会产生频率偏移,即多普勒效应,且相对运动越剧烈时多普勒效应越严重。在宽带OFDM系统中,系统的多普勒频移是随着频率的变化而变化。为了估计出宽带OFDM系统中的频变多普勒频移,本发明首先采用两块导频簇分别估计出系统中两个不同子载波上的多普勒频移,再在频域上采用线性拟合的方式估计得到整个频域上的多普勒频移,即所有子载波上的多普勒频移。此外,为了改善多普勒频移估计效果,本发明还采用
一种里程计结合双天线差分GNSS的组合导航方法.pdf
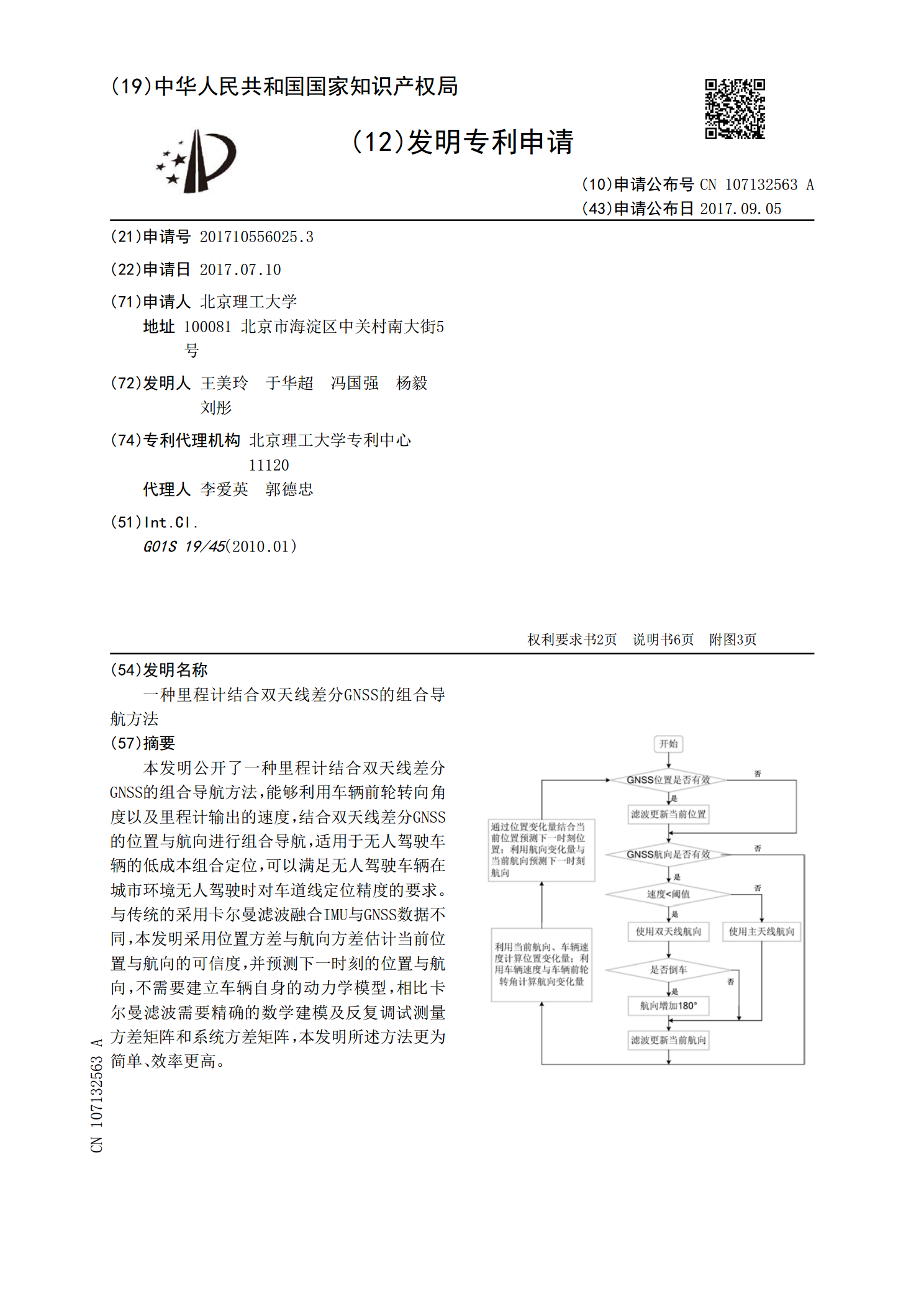
本发明公开了一种里程计结合双天线差分GNSS的组合导航方法,能够利用车辆前轮转向角度以及里程计输出的速度,结合双天线差分GNSS的位置与航向进行组合导航,适用于无人驾驶车辆的低成本组合定位,可以满足无人驾驶车辆在城市环境无人驾驶时对车道线定位精度的要求。与传统的采用卡尔曼滤波融合IMU与GNSS数据不同,本发明采用位置方差与航向方差估计当前位置与航向的可信度,并预测下一时刻的位置与航向,不需要建立车辆自身的动力学模型,相比卡尔曼滤波需要精确的数学建模及反复调试测量方差矩阵和系统方差矩阵,本发明所述方法更为