
一种单片集成z轴冗余的三轴陀螺结构阵列.pdf

是你****松呀

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种单片集成z轴冗余的三轴陀螺结构阵列.pdf
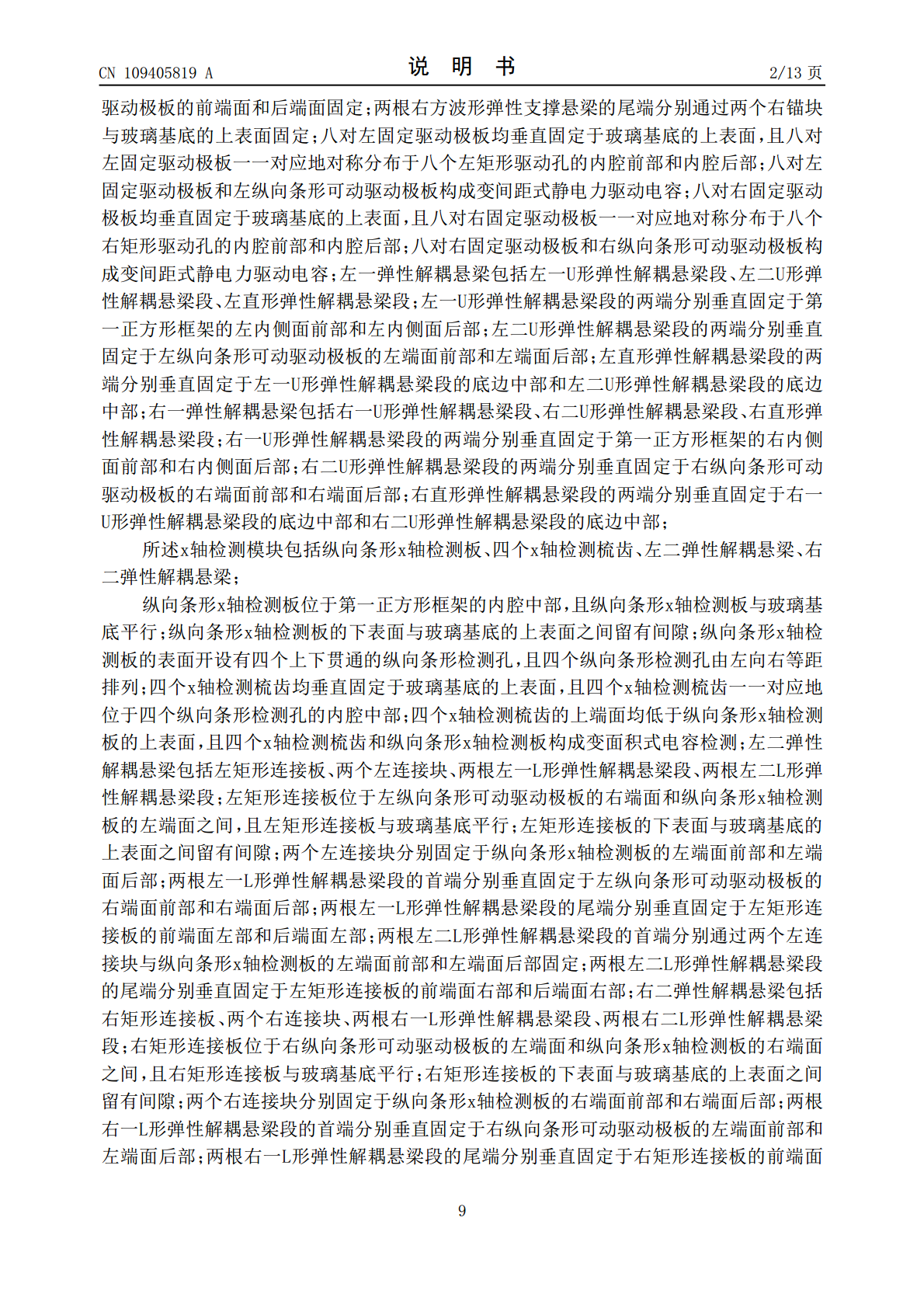
本发明涉及三轴陀螺仪,具体是一种单片集成z轴冗余的三轴陀螺结构阵列。本发明解决了现有三轴陀螺仪测量精度低、生产成本高的问题。一种单片集成z轴冗余的三轴陀螺结构阵列包括玻璃基底、第一正方形框架、第一驱动模块、x轴检测模块、第一z轴检测模块、第一驱动检测模块、第二正方形框架、第二驱动模块、y轴检测模块、第二z轴检测模块、第二驱动检测模块;所述第一驱动模块包括左纵向条形可动驱动极板、右纵向条形可动驱动极板、两个左锚块、两个右锚块、两根左方波形弹性支撑悬梁、两根右方波形弹性支撑悬梁、八对左固定驱动极板、八对右固定
一种新型的三轴螺丝机Z轴结构.pdf
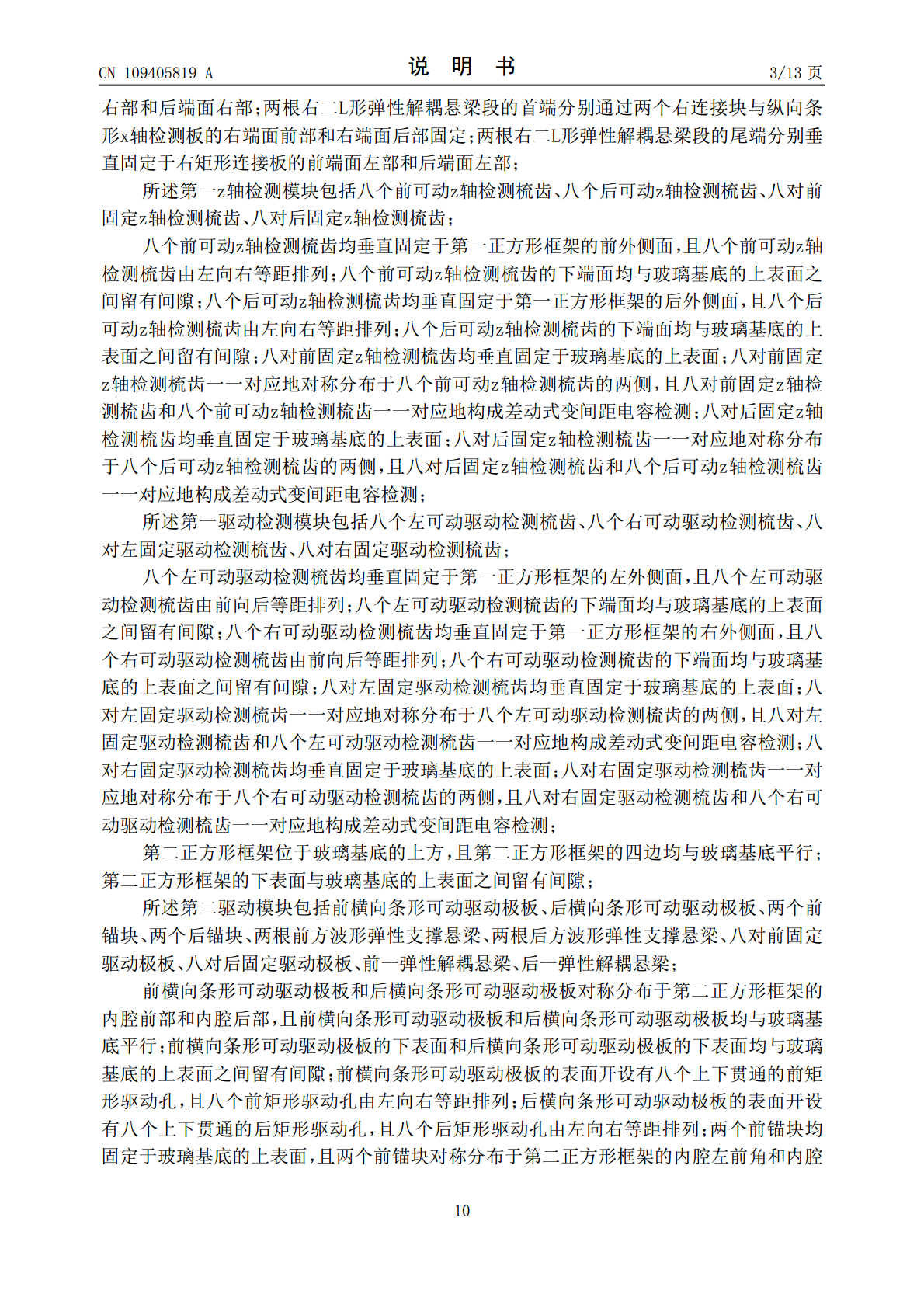
本实用新型公开了一种新型的三轴螺丝机Z轴结构,涉及三轴螺丝机Z轴结构领域,包括工作台,X轴导轨,Y轴导轨,Z轴导轨,驱动电机,丝杆,移动块,润滑机构;辅助机构。本实用新型通过设置润滑机构,驱动电机的输出端缓慢转动通过机械传动带动挤压杆向上移动,第一弹簧受力挤压,挤压杆移动并与活塞杆接触,且带动活塞杆向上移动,活塞杆移动带动活塞块移动,从而将润滑油从出油口挤出至丝杆的外壁,之后驱动电机的输出端反向转动并带动移动块向下移动,移动块移动并将移动块与丝杆接触处的润滑油携带至丝杆的外壁,通过此结构有利于对丝杆的外壁

三轴光纤陀螺用集成收发器件及其封装结构.pdf
本发明提供了一种三轴光纤陀螺用集成收发器件及其封装结构,包括光源、光调节单元、3个薄膜分束镜、3个光耦合单元、3个自聚焦透镜、3根光纤、3个探测器;光源输出光经过光调节单元形成线偏振光,线偏振光依次经过入射三个薄膜分束镜分为反射光和透射光,每个薄膜分束镜的反射光经过一个光耦合单元、一个自聚焦透镜耦合进一根光纤中,光纤连接到表头,表头返回光经一个光耦合单元会聚到一个探测器中。本发明的集成收发器件将多个分立光学器件集成为1个器件,在原有功能不变的基础上,大幅缩减器件体积,满足三轴光纤陀螺小型化需求。
三轴集成微飞轮结构.pdf
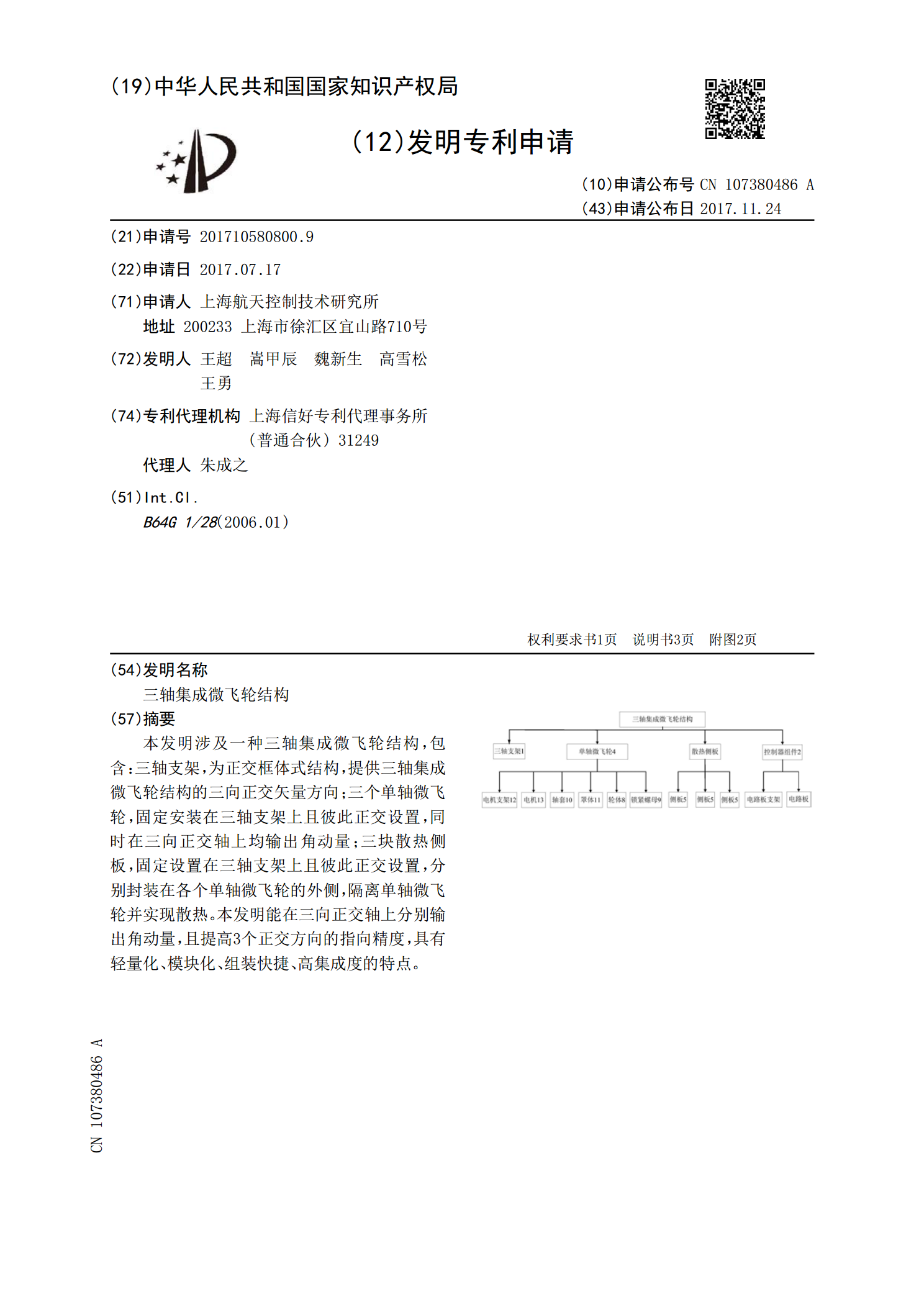
本发明涉及一种三轴集成微飞轮结构,包含:三轴支架,为正交框体式结构,提供三轴集成微飞轮结构的三向正交矢量方向;三个单轴微飞轮,固定安装在三轴支架上且彼此正交设置,同时在三向正交轴上均输出角动量;三块散热侧板,固定设置在三轴支架上且彼此正交设置,分别封装在各个单轴微飞轮的外侧,隔离单轴微飞轮并实现散热。本发明能在三向正交轴上分别输出角动量,且提高3个正交方向的指向精度,具有轻量化、模块化、组装快捷、高集成度的特点。

一种集成断电制动装置的Z轴伺服电机.pdf
一种集成断电制动装置的Z轴伺服电机,属于半导体芯片设备制造领域,为了解决现有Z轴伺服电机的制动装置响应不够迅速、制动力矩不够大的问题。它由Z轴伺服电机和断电制动装置组成,断电制动装置包括环形侧壁、固定磨擦片、间距定位套、牙嵌齿轮、牙嵌磨擦片、活动磨擦片、弹性装置和电磁铁线圈,环形侧壁固定在Z轴伺服电机的端盖上,电磁铁线圈套在Z轴伺服电机的Z轴电机轴外侧,活动磨擦片与Z轴伺服电机端盖之间设置有弹性装置,牙嵌磨擦片套在Z轴电机轴的外侧,牙嵌齿轮位于Z轴电机轴和牙嵌磨擦片之间,和牙嵌磨擦片滑动啮合连接,固定磨擦